 |


Обоснования выбора типа РМ и источника рабочего тела
|
|
|
|
КУРСОВОЙ ПРОЕКТ
по дисциплине «Детали машин и основы конструирования»
Проектирование блока рулевого привода зенитной управляемой ракеты
Студент гр. 121541 ___________________________________ Рыжова Т.В.
(подпись и дата)
Руководитель__________________________________________Лосев С.В.
(подпись и дата)
Тула 2007
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ РФ
Государственное образовательное учреждение
высшего профессионального образования
Тульский государственный университет
Кафедра Ракетостроения
Задание на курсовой проект
По дисциплине «Детали машин и основы конструирования»
Студент: Рыжова Т.В. Группа: 121541
Содержание:
Вариант схемы ЗУР
и её калибр – «Т»-0,11
Дата выдачи задания: ………………………………
Срок защиты курсовой работы:……………………
Задание выдал: ______________________________________Лосев С.В.
(подпись руководителя)
Задание принял: ______________________________________Рыжова Т.В.
(подпись)
Задание на курсовой проект
Разработать блок рулевого привода для ракеты “Тунгуска”, со следующими характеристиками:
· двумя парами согласованных рулей;
· пороховым аккумулятором давления (ПАД) в качестве источника рабочего тела;
· поршневыми рулевыми машинками (РМ);
Принципиальная схема ракеты «Тунгуска» приведена на рисунке 1.
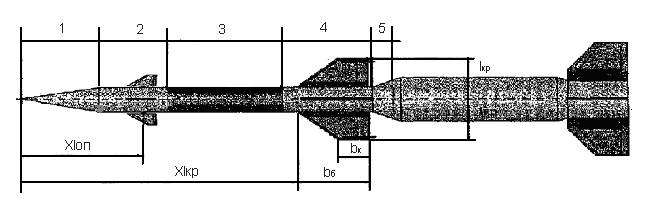
Рис. 1. Принципиальная схема ракеты «Тунгуска»
Исходные данные для расчетов и построений:





 ;
;


 ;
;



 Ускоритель
Ускоритель



р= 






Размеры руля



Содержание
Содержание 5
1. Введение 6
1.1. Обоснования выбора типа РМ и источника рабочего тела_ 7
1.2. Описание кинематической схемы БРП_ 9
|
|
|
1.3. Нагрузки, действующие на приводы органов управления_ 10
2. Расчет геометрических параметров отсека и рулей_ 11
3. Определение момента на валу рулевого привода_ 13
4. Расчет вала рулевого привода_ 16
4.1. Расчет на прочность вала согласованных рулей_ 16
4.2. Расчет на жесткость вала согласованных рулей_ 20
4.3. Расчет массы вала_ 25
5. Подбор подшипников для вала рулей_ 26
6. Расчет размеров кинематических элементов пневматических приводов 28
7. Расчет силового цилиндра рулевой машинки_ 29
7.1 Определение диаметра поршня РМ_ 29
7.2 Определение толщины оболочки цилиндра РМ_ 31
7.3 Длина рулевой машинки_ 32
7.4 Масса рулевой машинки_ 32
8. Расчет тяги рулевого привода_ 33
Проверка на устойчивость 34
9. Расчет узла соединения тяги с рычагом поворота руля_ 36
10. Крепление рычага рулевой машинки с валом_ 40
10.1 Штифтовые соединения_ 40
11. Расчет источников питания_ 42
11.1 Расчет ПАД_ 42
12. Заключение 45
Список литературы_ 46
Введение
Для выполнения данного курсового проекта необходимо сначала рассмотреть устройство блока рулевого привода, его основные компоненты, их достоинства и недостатки, а также разработать кинематическую схему его работы.
Основные требования, предъявляемые к блоку рулевого привода:
· минимальная масса БРП;
· минимальная длина коммуникаций;
· минимальные упругие деформации элементов;
· линейность рабочей характеристики;
· высокая эффективность и приемлемая надежность;
· развитие усилия, необходимого для поворота рулевого органа на заданный угол или с заданной скоростью;
· требуемое быстродействие и точность в зависимости от класса ЛА;
· простота и удобство в эксплуатации.
Обоснования выбора типа РМ и источника рабочего тела
Блок рулевого привода, является исполнительным органом системы управления и служит для передачи управляющего сигнала к аэродинамическим органам управления. В состав блока рулевого привода входят силовые приводы, механизмы и органы управления ЛА. Аэродинамические органы управления ЛА служат для образования переменных по величине и направлению аэродинамических сил и создания относительно центра масс ЛА управляющих и стабилизирующих моментов, обеспечивающих заданные режимы его полета. Рулевые приводы (РП) предназначены для перемещения или поворота органов управления и чаще всего представляют собой достаточно сложные замкнутые автоматические системы, относящиеся к классу силовых следящих приводов. Механизмы управления предназначены для передачи энергии от рулевых приводов к исполнительным органам системы управления ЛА.
|
|
|
РП являются наиболее энергоемкими элементами системы управления ЛА. Габаритные размеры и масса исполнительных устройств вместе с необходимыми источниками питания достаточно велики, а мощность, потребляемая ими, может превышать суммарную мощность, идущую на питание всех электронных схем и всех других элементов, входящих в систему управления ЛА.
В конструкциях ЛА часто усилитель преобразователь и приводной двигатель выполняются в виде единого агрегата – рулевой машинки, тип которой определяется источником энергии.
В данной конструкции в качестве источника рабочего тела для РМ используется пороховой аккумулятор давления (ПАД).
Основные достоинства приводов с ПАД – небольшая масса, высокая надежность и возможность длительного хранения в готовом для работы состоянии. Недостаток, который присущ всем пневматическим РМ, - некая зависимость работы от температуры окружающей среды, влияющей на значение давления в полости РМ.
Т. о. в данной конструкции будем использовать пневматические рулевые машинки. Широкое применение этих РМ на ЛА обусловлено их простотой, малыми габаритными размерами, сравнительно небольшой массой и приемлемой надежностью.
В то же время к недостаткам этих РМ следует отнести довольно большой постоянный расход воздуха, который стравливается в атмосферу, и сложность получения больших управляющих усилий.
|
|
|
