 |


Определение скорости и ускорения точки по заданным уравнениям ее движения
|
|
|
|
Решение
Применим теорему об изменении кинетической энергии системы:
 (1)
(1)
где T0 и T – кинетическая энергия системы в начальном и конечном положениях;  - сумма работ внешних сил, приложенных к системе;
- сумма работ внешних сил, приложенных к системе;  - сумма работ внутренних сил системы.
- сумма работ внутренних сил системы.
Для рассматриваемых систем, состоящих из абсолютно твердых тел, соединенных нерастяжимыми нитями,

Так как в начальном положении система находится в покое, то Т0=0.
Следовательно, уравнение (1) принимает вид:
 (2)
(2)
Кинетическая энергия рассматриваемой системы Т в конечном ее положении (рис.2) равна сумме кинетических энергий тел 1, 2, 3 и 4:
Т = Т1 + Т2 + 4Т3 + Т4. (3)
Кинетическая энергия груза 1, движущегося поступательно,
 (4)
(4)
Кинетическая энергия барабана 2, совершающего вращательное движение,
 , (5)
, (5)
где J2x – момент инерции барабана 2 относительно центральной продольной оси:
 , (6)
, (6)
w2 – угловая скорость барабана 2:
 .(7)
.(7)
После подстановки (6) и (7) в (5) выражение кинетической энергии барабана 2 принимает вид:
 . (8)
. (8)
Кинетическая энергия колеса 3, совершающего плоскопараллельное движение:
 , (9)
, (9)
где VC3 – скорость центра тяжести С3 барабана 3, J3x – момент инерции барабана 3 относительно центральной продольной оси:
 , (10)
, (10)
w3 – угловая скорость барабана 3.
Мгновенный центр скоростей находится в точке СV. Поэтому
 , (11)
, (11)
 . (12)
. (12)
Подставляя (10), (11) и (12) в (9), получим:
 . (13)
. (13)
Кинетическая энергия груза 4, движущегося поступательно
 . (14)
. (14)
Кинетическая энергия всей механической системы определяется по формуле (3) с учетом (4), (8), (13), (15):

Подставляя и заданные значения масс в (3), имеем:
|
|
|
или
 . (15)
. (15)
Найдем сумму работ всех внешних сил, приложенных к системе, на заданном ее перемещении (рис. 3).
Работа силы тяжести  :
:
 (16)
(16)
Работа силы тяжести  :
:
 (17)
(17)
Работа пары сил сопротивления качению  :
:
 (18)
(18)
где
 (19)
(19)
 (20)
(20)
 (21)
(21)
Подставляя (19), (20) и (21) в (18), получаем:
 (22)
(22)
Работа силы тяжести  :
:
 (17)
(17)
Работа силы тяжести  :
:
 (23)
(23)
Сумма работ внешних сил определится сложением работ, вычисляемых по формулам (17) – (24):
 .
.
Подставляя заданные значения, получаем:

Или
 . (24)
. (24)
Согласно теореме (2) приравняем значения Т и  , определяемые по формулам (16) и (24):
, определяемые по формулам (16) и (24):
 ,
,
откуда выводим
 м/с.
м/с.
Дано:
R2=30; r2=20; R3=40; r3=40
X=C2t2+C1t+C0
При t=0 x0=7  =0
=0
t2=2 x2=557 см
X0=2C2t+C1
C0=7
C1=0
557=C2 *52+0*5+7
25C2=557-7=550
C2=22
X=22t2+0t+7
 =V=22t
=V=22t
a=  =22
=22
V=r2  2
2
R2 2=R3 3
3=V*R2/(r2*R3)=(22t)*30/20*40=0,825t
 3= 3=0,825
3= 3=0,825
Vm=r3* 3=40*(0,825t)=33t
atm=r3
=0,825t
atm=R3 =40*0,825t=33t
anm=R3 23=40*(0,825t)2=40*(0,825(t)2
a= 
***********************************
Дано:R2=15; r2=10; R3=15; r3=15
X=C2t2+C1t+C0
При t=0 x0=6 =3
t2=2 x2=80 см
X0=2C2t+C1
C0=10
C1=7
80=C2 *22+3*2+6
4C2=80-6-6=68
C2=17
X=17t2+3t+6
=V=34t+3
a= =34
V=r2 2
R2 2=R3 3
3=V*R2/(r2*R3)=(34t+3)*15/10*15=3,4t+0,3
3= 3=3,4
Vm=r3* 3=15*(3,4t+0,3)=51t+4,5
atm=r3
=3,4t
atm=R3 =15*3,4t=51t
anm=R3 23=15*(3,4t+0,3)2=15*(3,4(t+0,08)2
a= 
Решение второй задачи механики
Дано:
m=4.5 кг; V0=24 м/с;
R=0.5V H;
t1=3 c;
f=0.2;
Q=9 H; Fx=3sin(2t) H.
Определить: x = f(t) – закон движения груза на участке ВС
Решение:
1) Рассмотрим движение на промежутке АВ

учитывая, что R=0.5V H;
Разделяем переменные и интегрируем

2) Рассмотрим движение на промежутке ВС (V0=VB)
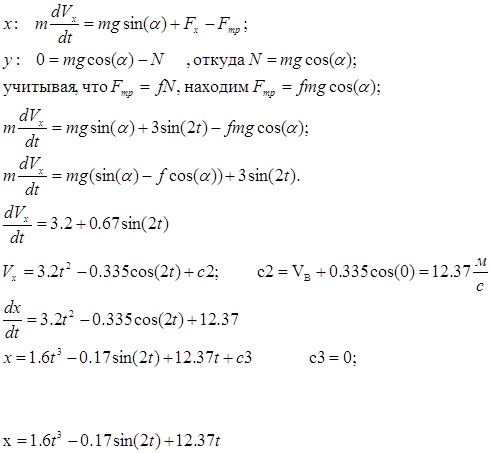

Дано:
m =36 кг
R =6 см=0,06 м
H =42 см=0,42 м
yC =1 см=0,01 м
z С =25 см=0,25 м
АВ=52 см=0,52
М=0,8 Н·м
t 1 =5 с
Найти реакции в опорах А и В.
Решение
Для решения задачи используем систему уравнений, вытекающую из принципа Даламбера:
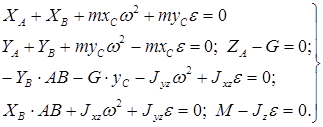 (1)
(1)
Для определения углового ускорения ε из последнего уравнения системы (1) найдем момент инерции тела относительно оси вращения z по формуле
|
|
|
 , (2)
, (2)
где Jz 1 − момент инерции тела относительно центральной оси С z 1, параллельной оси z; d – расстояние между осями z и z 1.
Воспользуемся формулой
 , (3)
, (3)
где α, b, g - углы, составленные осью z 1 с осями x, h, z соответственно.
Так как α=90º, то
 . (4)
. (4)
Определим моменты инерции тела  ,
,  как однородного сплошного цилиндра относительно двух осей симметрии h, z
как однородного сплошного цилиндра относительно двух осей симметрии h, z
 ;
;
 .
.
Вычисляем
 ;
;
 .
.
Определяем угол g из соотношения
 ;
;
 ;
;
 .
.
Угол b равен
 ;
;
 .
.
По формуле (4), вычисляем
 .
.
Момент инерции тела относительно оси вращения z вычисляем по формуле (2):
,
где d = yC;
 .
.
Из последнего уравнения системы (1)
 ;
;
 .
.
Угловая скорость при равноускоренном вращении тела
 ,
,
поэтому при ω0=0 и t = t 1 =5 c
 .
.
Для определения реакций опор следует определить центробежные моменты инерции  и
и  тела.
тела.  , так как ось х, перпендикулярная плоскости материальной симметрии тела, является главной осью инерции в точке А.
, так как ось х, перпендикулярная плоскости материальной симметрии тела, является главной осью инерции в точке А.
Центробежный момент инерции тела  определим по формуле
определим по формуле
 ,
,
где  , т.е.
, т.е.
 .
.
Тогда
 .
.
Подставляя известные величины в систему уравнений (1), получаем следующие равенства
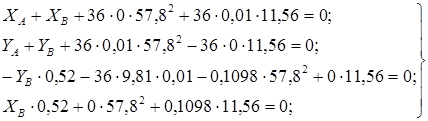
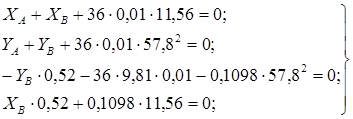

Отсюда



Ответ:  ,
,  ,
,  ,
,  .
.
Определение скорости и ускорения точки по заданным уравнениям ее движения
Задание: по заданным уравнениям движения точки М установить вид ее траектории и для момента времени t = t1 (с) найти положение точки на траектории, ее скорость, касательное и нормальное ускорения, а также радиус кривизны траектории.
Исходные данные:
x=5cos(pt2/3); y= -5sin(pt2/3); (1)
t1=1 (x и y – в см, t и t1 – в с).
Решение:
Уравнения движения (1) можно рассматривать как параметрические уравнения траектории точки. Получим уравнения траектории в координатной форме.
x2 + y2 = (5cos(pt2/3))2 + (-5sin(pt2/3))2;
Получаем x2 + y2 = 25, т. е. траекторией точки является окружность, показанная на рис. 1.
Вектор скорости точки
 (2)
(2)
Вектор ускорения точки

Здесь Vx, Vy, ax, ay – проекции скорости и ускорения точки на соответствующие оси координат.
Найдем их, дифференцируя по времени уравнения движения (1)
|
|
|
 (3)
(3)
По найденным проекциям определяем модуль скорости:
V=Ö(Vx2 + Vy2); (4)
и модуль ускорения точки:
а =  Ö(ах2 +ау2). (5)
Ö(ах2 +ау2). (5)
Модуль касательного ускорения точки
аt=|dV/dt|, (6)
аt= |(Vxax+Vyay)/V| (6’)
Знак “+” при dV/dt означает, что движение точки ускоренное, знак “ - “ - что движение замедленное.
Модуль нормального ускорения точки
ап= V2/p; (7)
p – радиус кривизны траектории.
Модуль нормального ускорения точки можно найти и следующим образом:
an = Ö(а2 -at2); (8)
После того как найдено нормальное ускорение по формуле (8), радиус кривизны траектории в рассматриваемой точке определяется из выражения:
p=V2/ an. (9)
Результаты вычислений по формулам (3)-(6), (8), (9) для момента времени t1=1с приведены ниже в таблице
| Координаты см | Скорость см/с | Ускорение, см/с2 | Радиус см | |||||||
| х | у | Vx | Vy | V | ax | ay | a | at | an | p |
| 2.5 | -2.5Ö3 | -5p/Ö3 | -5p/3 | 10p/3 | -20.04 | 13.76 | 24.3 | 10.5 | 21.9 | 5 |
Ниже на рисунке показано положение точки М в заданный момент времени.

Дополнительное задание:
z=1.5t x=5cos(pt2/3); y= -5sin(pt2/3); t1=1 (x и y – в см, t и t1 – в с).
Найдем скорости и ускорения дифференцируя по времени уравнения движения

По найденным проекциям определяем модуль скорости:
V=Ö(Vx2 + Vy2+Vz2);
и модуль ускорения точки:
а = Ö(ах2 +ау2+ аz2).
V=  ;
;
a=24.3 см/с;
Касательное ускорение точки
аt= |(Vxax+Vyay+ Vzaz)/V|
at=(-9.069*(-20.04)+(-5.24)*13.76+1.5*0)/10.58=10.36 см/с
Модуль нормального ускорения точки можно найти и следующим образом:
an = Ö(а2 -at2);
an=21.98 см/с2.
Радиус кривизны траектории в рассматриваемой точке определяется из выражения:
p=V2/ an. р=5.1 см
Результаты вычислений для момента времени t1=1с приведены ниже в таблице
Координаты см | Скорость см/с | Ускорение, см/с2 | Радиус см | ||||||||||
| x | y | z | Vx | Vy | Vz | V | ax | ay | az | a | at | an | p |
| 2.5 | -4.33 | 1.5 | -9.07 | -5.24 | 1.5 | 10.58 | -20.04 | 13.76 | 0 | 24.3 | 10,36 | 21.98 | 5.1 |
Задание: точка М движется относительно тела D. По заданным уравнениям относительного движения точки М и движения тела D определить для момента времени t=t1 абсолютную скорость и абсолютное ускорение точки М.
|
|
|
Дано:
ОМ=Sr=120pt2 см;
jе=8t2 – 3t рад;
t1=1/3 c; R=40 см.
Решение:
1) Положение точки М на теле D определяется расстоянием Sr=ОМ
при t=1/3 c Sr=120p/9=41.89 см.

При t=1/3с Vr=80p=251.33 см/с.
art=d2Sr/dt2 art=240p=753.98 см/с2
arn=Vr2/R arn=(80p)2/40=1579.14 см/с2
2) Ve=wer, где r- радиус окружности, описываемой той точкой тела, с которой в данный момент совпадает точка М.
a=OM/R. r=R*sina=40*sin(p/3)=34.64 см.
wе=dje/dt=16t-3 при t=1/3 wе=7/3=2.33 с-1
Ve=80.83 см/с.
аец=we2 r аец=188.6 см/с2.
аев=eеr eе= d2je/dt2=16 с-2 аев=554.24 см/с2.
3) 
ас=2*wеVrsin(wе, Vr) sin(wе, Vr)=90-a=p/6 ac=585.60 см/с2
4) 
V=Ö(Ve2+Vr2) V=264.01 см/с
Модуль абсолютного ускорения находим методом проекций.
ax=aев+ас
ay=arncos(p/3)+artcos(p/6)
az=-аец - arncos(p/6)+artcos(p/3)
а=Ö(ax2+ay2+az2)
Результаты расчетов сведены в таблицу
| w e, c-1 | |||
Скорость см/с
e е
с-2
Ускорение, см/с2
