 |


Разработать графическую схему алгоритма работы программы Интерфейс USART микроконтроллера AVR.
|
|
|
|
Разработать графическую схему алгоритма работы программы таймера микроконтроллера AVR.
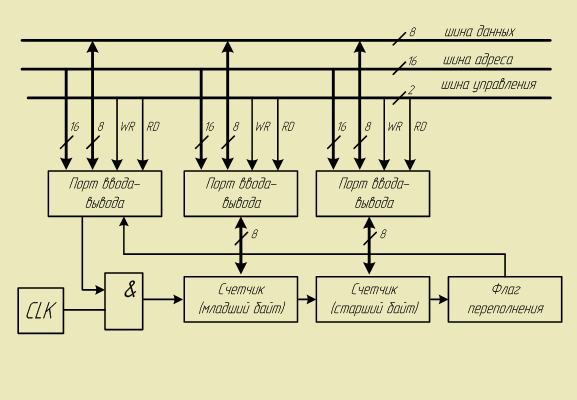
Структурная схема таймера микроконтроллера ADuC842
Функциональная схема таймера микроконтроллера AVR (ATmega128)
Разработать графическую схему алгоритма работы программы системы тактирования микроконтроллера AVR.

Способы тактирования МК AVR с использованием: а — кварцевого резонатора; б — внешнего генератора; в — RC-цепочки
XTAL1 - Вход инвертора генератора и вход внешнего тактового сигнала
XTAL2 - Выход инвертора генератора
33.Разработать графическую схему алгоритма работы программы организации портов ввода/вывода микроконтроллера AVR. Все порты являются двунаправленными портами ввода-вывода с опциональными подтягивающими резисторами. Рисунок 30 иллюстрирует функциональную схему одной линии порта ввода-вывода, обозначенный как Pxn.

Рисунок 30 – Организация универсального цифрового ввода-вывода (1)
Прим. 1: Сигналы WPx, WDx, RRx, RPx и RDx являются общими в пределах одного порта. Сигналы clkI/O, SLEEP, и PUD являются общими для всех портов.
Разработать графическую схему алгоритма работы программы сторожевого таймера микроконтроллера AVR. Сторожевой таймер (Watchdog Timer)

Сторожевой таймер тактируется отдельным встроенным генератором, работающим с частотой 1 МГц при типовом напряжении питания VCC=5 В (см. типовые значения при других значениях VCC). Установкой коэффициента предварительного деления можно изменять длительность интервала до сброса по сторожевому таймеру от 16 тыс. до 2048 тыс. циклов (от 16 до 2048 мс). Команда WDR (Watchdog Reset) сбрасывает сторожевой таймер.
С момента сброса сторожевого таймера можно установить восемь периодов длительности тактового сигнала, устанавливая, таким образом длительность периода сброса. Если период сброса завершается (в течение этого периода не поступил сигнал сброса сторожевого таймера), то микроконтроллер ATmega603/103 сбрасывается и его работа продолжается по вектору сброса. Подробности тактирования сброса по сторожевому таймеру см. выше в разделе Сброс по сторожевому таймеру.
|
|
|
При разрешении сторожевого таймера его состояние неизвестно и прежде, чем разрешать сторожевой таймер, необходимо выполнить команду WDR. В ином случае прибор может быть сброшен прежде, чем будет выполнена команда WDR прописанная после разрешения. Для предотвращения случайного запрета, запрет сторожевого таймера должен сопровождаться специальной процедурой выключения. Подробности в описании регистра управления сторожевым таймером.
Разработать графическую схему алгоритма работы программы подсистемы прерываний микроконтроллера AVR.
Подсистема прерываний - совокупность аппаратных и программных средств, обеспечивающих реакцию программы на события, происходящие вне программы. Такие события возникают, как правило, случайно и асинхронно по отношению к программе и требуют прекращения (чаще временного) выполнения текущей программы и переход на выполнение другой программы (подпрограммы), соответствующей возникшему событию. 
Организация векторного прерывания
36.Разработать графическую схему алгоритма работы программы интерфейса SPI микроконтроллера AVR. Последовательный периферийный интерфейс (SPI) обеспечивает высокоскоростной синхронный обмен данными между микроконтроллерами AT90S4434/8535 и периферийными устройствами или между несколькими AVR-устройствами.

Разработать графическую схему алгоритма работы программы Интерфейс USART микроконтроллера AVR.

Блок-схема USART в режиме UART. В режиме UART модуль USART передает и принимает символы на скорости, асинхронной другому устройству. Синхронизация каждого символа основана на выбранной скорости передачи USART. Для выполнения функций передачи и приема используется одинаковая скорость в бодах.
|
|
|
38.Разработать графическую схему алгоритма работы программы интерфейса TWI микроконтроллера AVR. Двухпроводной последовательный интерфейс TWI идеально подходит для типичных применений микроконтроллера. Протокол TWI позволяет проектировщику системы внешне связать до 128 различных устройств через одну двухпроводную двунаправленную шину, где одна линия - линия синхронизации SCL и одна - линия данных SDA. В качестве внешних аппаратных компонентов, которые требуются для реализации шины, необходимы только подтягивающий к плюсу питания резистор на каждой линии шины. Все устройства, которые подключены к шине, имеют свой индивидуальный адрес, а механизм определения содержимого шины поддерживается протоколом TWI.

Структура модуля TWI

Внешние подключения к шине TWI
|
|
|
