 |


Вопрос 2:простой пороговый метод нелинейной фильтрации импульсных. Анизотропная фильтрация. Рекуррентный алгоритм анизотропной фильтрации.
|
|
|
|
Простой пороговый метод нелинейной фильтрации импульсных помех.
Сигнал от каждого из элементов массива [ Ei,j ] анализируемого изображения сравнивается со средним значением сигнала для небольшой группы m * n в окрестностях данного элемента
 (1)
(1)
Здесь m и n – нечётные числа. Если значение сигнала Ei,j превышает  на заданную пороговую величину ξ, то значение сигнала заменяется на среднее значение сигнала группы. Если – нет, то сохраняется прежнее значение. Таким образом, формируется новый массив
на заданную пороговую величину ξ, то значение сигнала заменяется на среднее значение сигнала группы. Если – нет, то сохраняется прежнее значение. Таким образом, формируется новый массив
 (1)
(1)
в котором устранены одиночные «выбросы», т.е. помехи, некоррелированные с соседними элементами.
Анизотропная фильтрация относится к категории линейных процедур цифровой обработки массива [ Ei,j ]. Это более совершенный, теоретически более обоснованный, но вместе с тем и более сложный алгоритм пространственной фильтрации. Он заключается в выполнении операции свёртки исходного массива изображения формата M * N со скользящим сглаживающим массивом [ W ] меньшего формата m * n (ядро свёртки). Иначе говоря, реализуется процедура программного сканирования исходного изображения скользящей апертурой меньшего формата и вычисление свёртки на каждом шаге сканирования. В результате формируется новый массив [ Ei,j ], имеющий (также как и исходный) формат M * N, но представляющий собой «сглаженное» изображение, подвергнутое низкочастотной пространственной фильтрации.
 (2)
(2)
Каким образом следует выбирать размерность сглаживающего массива m * n? Размерность массива, очевидно, должна быть согласована с интервалом пространственной корреляции исходного изображения.
Естественно, что для изображений с плавным изменением освещённости от элемента к элементу, т.е. изображений, не содержащих мелкие детали в своей структуре, целесообразно увеличивать размер сглаживающей матрицы. При этом повышается эффективность фильтрации с точки зрения подавления импульсных помех. Однако, следует иметь ввиду, что время обработки исходного изображения при программной реализации алгоритма растёт пропорционально m 2. А поскольку в АТСН, работающих в реальном масштабе времени, параметр быстродействия системы часто является одним из важнейших, то размерность массива m * n нужно выбирать и с учётом допустимых временных затрат на вычисление двумерной свёртки.
|
|
|
Ниже даны примеры различных видов сглаживающих массивов, рекомендуемых с учётом свойств оптических систем.
 (2)
(2)
Заметим, что нормирующие множители 1/9, 1/10, 1/16 (значения которых обратно пропорциональны соответствующим суммам весовых коэффициентов сглаживающих матриц) позволяют сохранить масштаб чисел, представляемых двоичным кодом после процедуры фильтрации.
Более рациональным, с точки зрения использования оперативной памяти ЦВУ, является рекуррентный алгоритм анизотропной фильтрации. Математическая форма записи рекуррентного алгоритма практически не отличается от формы записи рассмотренного выше алгоритма анизотропной фильтрации
 (2 а)
(2 а)
Однако, здесь при вычислении дискретной свертки могут использоваться как элементы массива [ Ei,j ], так и элементы, взятые из уже сглаженного массива Ei,j*. Благодаря этому, одни и те же ячейки оперативной памяти могут использоваться вначале для хранения исходных значений Ei,j, а затем новых значений Ei,j*, полученных после обработки данных. Если сканирование исходного массива [ Ei,j ] осуществляется, например, слева – направо и сверху – вниз, то в пределах программного окна форматом m * n используются элементы из нового массива [ E i,j*] для всех k = −(m −1)/2; …; −1, 0 и l = −(n −1)/2; …; −1, а для всех остальных – из исходного массива [ Ei,j ].
|
|
|
Можно добавить, что благодаря вторичному использованию при вычислении свертки элементов, уже прошедших процедуру фильтрации, рекуррентный алгоритм анизотропной фильтрации может давать лучшие результаты сглаживания, чем алгоритм, рассмотренный выше (ф. 2.3).
Вопрос 3:МЕДИАННАЯ ФИЛЬТРАЦИЯ.Понятие Медианы, одномерного и двумерного медианного фильтра.
Медианная фильтрация осуществляется посредством замены значения каждого элемента массива [ Ei,j ], находящегося в центре окна скользящей апертуры, медианой исходных значений, находящихся внутри апертуры. В результате такой обработки на выходе медианного фильтра получается как бы сглаженное изображение, в котором отсутствуют малоразмерные, например, точечные детали, занимающие малое (по сравнению с размерами апертуры) число элементов.
Медианой (med) последовательности X 1, X 2, …, Xn при нечётном n является средний член ряда, получающегося при упорядочении последовательности по возрастанию (или по убыванию). При чётномn медиана определяется как среднее арифметическое двух среднихчленов упорядоченного ряда.
Одномерный медианный фильтр с апертурой n для одномерной последовательности { Xi; i ∈ Z } при нечётном n определяется как
 (3)
(3)
где: v = (n – 1)/2; Z – множество всех натуральных чисел.
Двумерный медианный фильтр с апертурой L для двумерного массива  определяется как
определяется как
 (4)
(4)
Вопрос 4:АЛГОРИТМЫ ОПРЕДЕЛЕНИЯ ИНТЕГРАЛЬНЫХ ПАРАМЕТРОВ ДИСКРЕТНЫХ ИЗОБРАЖЕНИЙ.ГИСТОГРАММА ОТСЧЕТОВ ОСВЕЩЕННОСТИ.СРЕДНЯЯ ОСВЕЩЕННОСТЬ И СРЕДНЕКВАДРАТИЧЕСКОЕ ОТКЛОНЕНИЕ ОСВЕЩЕННОСТИ В ИЗОБРАЖЕНИИ.
Алгоритмы определения интегральных параметров
дискретных изображений.
В некоторых случаях на этапе предварительной обработки изображений целесообразно определение некоторых обобщённых (интегральных) признаков или свойств изображений, которые в сочетании с другими признаками (или самостоятельно) могут быть использованы на последующем этапе распознавания объектов, попавших в поле зрения АТСН.
Гистограмма отсчётов освещённости – зависимость числа одинаковых значений освещённости в анализируемом дискретном изображении, соответствующих какому"либо уровню квантования сигнала, от этого уровня
|
|
|

где: h = 0, 1, 2, …, (H − 1); H – число уровней квантования видеосигнала.
Средняя освещённость в изображении

где n – число разрядов двоичного кода (число разрядов АЦП).
Среднеквадратическое отклонение освещённости от среднего значения

Вопрос 5: ДИФФЕРЕНЦИАЛЬНЫЕ АЛГОРИТМЫ ОБРАБОТКИ ИЗОБРАЖЕНИЙ.СПОСОБЫ ОПРЕДЕЛЕНИЯ НОРМ ГРАДИЕНТА ОСВЕЩЕННОСТИ В ИЗОБРАЖЕНИИ.
Дифференциальные алгоритмы используются для определения нормы градиента в точках изображения с целью последующего выделения границ и контуров объектов наблюдения.
1. Простейший алгоритм вычисления нормы градиента
 (5)
(5)
где: Gi,j – норма градиента для элемента матрицы [ Ei,j ].
Здесь при анализе каждой точки исходного изображения используются три значения сигнала, соответствующие смежным точкам. Отметим, что при незначительном увеличении погрешности вычислений, нормы градиента могут определяться по упрощённой формуле алгоритма:
 (5 а)
(5 а)
2. Меньшую погрешность даёт, так называемый, оператор Робертса, благодаря тому, что на каждом шаге вычисленийиспользуются четыре исходных значения сигнала:
 (6)
(6)
или
 (6 а)
(6 а)
3. Вычислительный алгоритм Собела предполагает использование восьми отсчётов освещенности в окрестностях анализируемой точки, однако значение освещенности в самой анализируемой точке в вычислениях не участвует
 (7)
(7)
или
 (7 а)
(7 а)
где:
Gi, j (x) = [ E (i −1),(j −1) +2 E (i −1), j +Ε(i −1),(j+ 1)] − [ E (i+ 1),(j −1) +2 E (i+ 1), j + Ε(i+ 1),(j+ 1)];
Gi, j (y) = [ E (i − 1),(j −1) +2 Ei,(j −1) +Ε(i+ 1),(j −1)] − [ E (i −1),(j+ 1)+2 Ei, (j+ 1) + Ε(i+ 1),(j+ 1)].
Такой алгоритм наряду с более точным определением нормы градиента позволяет, в принципе, определять и направление вектора градиента в плоскости анализа изображения:

где α – угол между направлением вектора градиента и направлением строк матрицы [ Ei,j ].
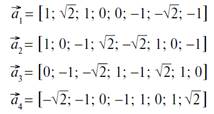
4. В тех случаях, когда требуется максимальная точность в определении нормы градиента, может быть рекомендован многошаговый метод вычислений

где: G (k) – скалярное произведение векторов 

|
|
|
При проектировании АТСН выбор конкретного алгоритма следует делать с учётом допустимых временных затрат, определяемых техническим заданием.
Вопрос 6:. Выделение границ контролируемых объектов.
В общем случае процедуре выделения границ (контуров) изображений объектов должен предшествовать этап определения нормыградиента для всех точек исходного массива Gi,j. После этого границы объекта могут быть найдены следующим образом.
В качестве первого этапа осуществляется выбор координат точек изображения, для которых значения нормы градиента превышают установленный порог

где: i,j Є ωгр.– множество координат точек, принадлежащих области изображения вблизи границ объекта; D – пороговое значение нормы градиента.
В результате дополнительного анализа в окрестностях каждой из точек с координатами i,j Є ωгр. должны быть оставлены только две, непосредственно прилегающие к данной точке. Эти две точки могут быть выбраны среди других предполагаемых контурных точек (например, точек с координатами i ± 1, j ± 1) по признаку максимального значения нормы градиента. В крайнем случае, если этому признаку удовлетворяют более двух прилегающих точек, должны быть выбраны две любые точки, например, первые из числа рассматриваемых. Это, хотя и может в конечном итоге привести к незначительным погрешностям в определении координат контурных точек, но позволит избежать более существенных аномальных ошибок, связанных с искажением формы и с очень значительными погрешностями при вычислении периметра объекта.
В частном случае, при обработке бинарных изображений, то есть изображений, каждый элемент которых может принимать одно из двух значений «0» или «1» («чёрное» или «белое»), процедура выделения границ объектов существенно упрощается и может быть сведена к простым логическим операциям

или

Здесь i,j Є ωгр. – координаты точек, принадлежащих границам объектов; a, b – возможные значения функции Ei,j («0» или «1»); & и  – символы логических операций «И» и «ИЛИ» соответственно.
– символы логических операций «И» и «ИЛИ» соответственно.
Вопрос 7:
Алгоритмы трансформирования исходных изображений на основе ортогональных преобразований.
В некоторых случаях, для сокращения объёма данных или облегчения процедуры выделения признаков объектов на последующих этапах распознавания, целесообразно предварительно преобразовывать исходный двумерный массив [ Ei,j ] в массив значений коэффициентов [ Fu,v ], имеющий такой же формат M * N, как и исходное изображение.
Вторичный массив или иначе матрица коэффициентов [ Fu,v ] называется трансформантой. Один из видов ортогональных преобразований – дискретное преобразование Фурье. В случае преобразования Фурье трансформанта является ничем иным, как двумерным пространственным спектром изображения.
|
|
|
В общем случае любое преобразование исходного изображения на основе ортогональных операторов можно рассматривать как операцию разложения изображения в обобщенный двумерный спектр, а коэффициенты (т.е. элементы трансформанты) – как амплитуды соответствующих спектральных составляющих. Отметим, что если при этом в качестве базисных функций используются негармонические функции, то понятие пространственной частоты следует обобщить и использовать понятие секвенты.
Секвентой называется величина, равная половине среднего числа пересечений нуля в единицу времени или на единицу длины.
В процессе ортогональных преобразований изображения, имеющего сильные корреляционные связи между соседними элементами, происходит декорреляция (отбеливание). Таким образом, значения элементов трансформанты оказываются практически некоррелированными. В отличие от исходного массива, для которого характерно в среднем равномерное распределение энергии сигнала между элементами, распределение энергии сигнала в трансформанте крайне неравномерно. Основная доля энергии приходится на элементы с малыми порядковыми номерами (т.е. на низкие пространственные секвенты) и лишь небольшая доля – на прочие (см. рис 2. 3). 
Это обстоятельство позволяет либо вообще отбросить (т.е. считать равными нулю) большую часть элементов трансформанты (что означает, по существу, низкочастотную пространственную фильтрацию), либо квантовать их на малое число уровней с использованием минимального числа разрядов двоичного кода.
Рассмотрим некоторые наиболее распространённые виды ортогональных преобразований, применяемых при цифровой обработке изображений.
Дискретное преобразование Фурье:
 (23)
(23)
Здесь коэффициенты Fu,v в общем случае являются комплексными числами:
 (24)
(24)
Каждый комплексный коэффициент можно заменить двумя действительными составляющими. Эти составляющие характеризуют, соответственно, пространственные дискретные спектры амплитуд и фаз и определяются следующим образом:
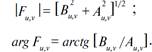 (25)
(25)
Основной недостаток дискретного преобразования Фурье – сравнительно большой объём вычислений, а также необходимость сохранения большого числа составляющих трансформанты по сравнению с другими ортогональными преобразованиями при одинаковых ошибках восстановления изображения (т.е. при одинаковых потерях информации). Кроме того, для хранения отдельных составляющих комплексных коэффициентов, требуется больший объём памяти, чем для действительных значений элементов исходного массива. Говоря о дискретном преобразовании Фурье, следует упомянуть о возможности применения специально разработанных алгоритмов быстрого преобразования Фурье [1], а также о специализированных вычислительных устройствах для их реализации – так называемых систолических процессорах [2].
Преобразование Уолша (при M = N):

В свою очередь, коэффициенты bk (Z) определяются следующим образом: bk (Z) равен значению k "того разряда двоичного кода числа Z, состоящего из l двоичных разрядов. Если, например, Z = 10, т.е. 1010=10102, то b 0 = 0; b 1 = 1; b 2 = 0; b 3 = 1.
Преобразование Адамара (при M = N):

bк – определяются в соответствии с правилом их определения в преобразовании Уолша.
Очевидно, что все виды ортогональных преобразований являются обратимыми, т.е., используя процедуру обратного преобразования, можноиз трансформанты восстановить исходное изображение.
Пусть [ Ei,j ] – массив исходного изображения форматом N * N, где j – номер строки, i – номер столбца элементов (номер элементов в строке); [ Fu,v ] – трансформанта изображения, которая имеет тот же формат N * N, где u и v соответственно номер строки и номер столбца элементов трансформанты. Тогда, в общем случае, независимо от вида ортогонального преобразования, запишем:
 (28)
(28)
где a (i,j,u,v) и b (i,j,u,v) – базисные функции прямого и обратного преобразований соответственно.
С практической точки зрения важно отметить, что все рассмотренные выше виды ортогональных преобразований являются разделимыми по переменным. Таким образом, вычисление прямых и обратных двумерных ортогональных преобразований удаётся свести к последовательному выполнению одномерных преобразований:
 (29)
(29)
Здесь a стр.(i,u), bстр.(i,u) и a э(j,v), b э(j,v) – базисные функции прямого и обратного преобразований, соответственно вдоль направления строк и столбцов.
Для удобства записи и вычислений целесообразно использовать матричный аппарат:
 (30)
(30)
Здесь [ A э] и [ A стр.] – матрицы прямого преобразования; [ B э] и [ B стр.] – матрицы обратного преобразования; [ A стр.] T и [ B стр.] T – матрицы, полученные в результате транспонирования матриц [ A стр.] и [ B стр.].
Разумеется, независимо от формы математического представления, прямое и обратное ортогональные преобразования двумерных массивов требуют, в общем случае, значительных вычислительных затрат. Это следует учитывать при проектировании АТСН, работающих в реальном масштабе времени. Однако, при цифровой обработке бинарных изображений, процедуры ортогональных преобразований существенно упрощаются, особенно в случае использования бинарных базисных функций (преобразования Уолша, Адамара и др.).
Вопрос 8:
Алгоритмы выделения признаков контролируемых объектов. Определение прощади,периметра параметров вписан.и описанных фигур
Выделение признаков позволяет иногда упростить реализациюпоследующего этапа – этапа распознавания или идентификацииобъектов. Путём выделения признаков удаётся создать сжатое описание объекта в выбранной системе признаков.
При выборе наиболее информативных признаков необходимоучитывать как свойства самих объектов, так и возможности телевизионных датчиков – первичных формирователей сигнала изображения с точки зрения их разрешающей способности. Необходимотакже принимать во внимание степень сложности процедуры выделения признаков за ограниченное время анализа.
В автоматизированных телевизионных системах наблюдения наиболее предпочтительными являются геометрические признаки объектов:
– площадь и периметр изображения объекта;
– число отверстий в теле объекта;
– размеры вписанных и описанных простейших геометрических фигур (окружностей, прямоугольников, треугольников и др.);
– число и взаимное расположение углов;
– моменты инерции изображений объектов.
Важной особенностью большинства геометрических признаков является их инвариантность относительно разворота изображения объекта. Кроме того, путём нормирования геометрических признаков друг относительно друга, достигается инвариантность относительно масштаба изображения объекта.
Определение площади и периметра.
Площадь изображения объекта вычисляется путём простого подсчёта числа элементов, относящихся к объекту
 (12)
(12)
где L – множество координат массива [ Ei,j ], принадлежащих объекту.
Периметр изображения объекта вычисляется после того, как на предварительном этапе выделены границы объекта:
 (13)
(13)
где a гр. – множество граничных (контурных) точек изображения объекта.
На основе выделенных признаков можно сформировать обобщенный нормированный признак, инвариантный к масштабу изображения

Определение радиусов вписанных и описанных окружностей.
Процедура складывается из двух этапов (рис 2.4).
1. Определение координат геометрического центра изображения объекта
 (14)
(14)
где xi,j; yi,j – координаты точек изображения объекта, которые могут быть заменены соответствующими номерами столбцов и строк, содержащих данный элемент xi,j = i; yi,j = j.
2. Вычисление минимального и максимального расстояний от центра до границ изображения объекта, выделенных на предварительном этапе:
 (15; 16)
(15; 16)
Очевидно, что нормированный признак R ′ = Rmax ⁄ Rmin всегда является инвариантным к масштабу изображения объекта.
Определение сторон описанного прямоугольника.
Это – одна из простейших процедур.
 1. Надо определить максимальные и минимальные значения абсцисс и ординат изображения объекта imax и imin; jmax и jmin.
1. Надо определить максимальные и минимальные значения абсцисс и ординат изображения объекта imax и imin; jmax и jmin.
2. Высота и основание прямоугольника определяются следующим образом:

Отметим, что данный признак (в отличие от предыдущих) не является инвариантным к развороту изображения объекта (рис. 2.5).
Вопрос 9:
Определение моментов инерции изображения объекта.
Моменты инерции являются довольно информационными признаками для последующего этапа распознавания образов, но их определение является не такой уж простой задачей. Вместе с тем, в некоторых случаях могут использоваться промежуточные результаты вычислений, например, для определения угловой ориентации изображения объекта относительно приборной системы координат.
Обозначим главные искомые моменты инерции изображения объекта через J 1 и J 2 (рис. 2.7б). Однако, чтобы найти J 1 и J 2, необходимо предварительно определить так называемые промежуточные моменты Jx и Jy, т.е. моменты инерции относительно вертикальной и горизонтальной осей приборной системы координат, а также смешанный момент Jx,y (рис. 2.7 а).

Вычисление осуществляется в следующем порядке.
1. Определяются координаты центра «тяжести» (энергетического центра) изображения объекта:
 (19)
(19)
2. Определяются промежуточные моменты Jx, Jy, Jx,y:
 (18)
(18)
3. Рассчитываются главные моменты:
 (20)
(20)
Вопрос 10: Определение числа и взаимного положения углов.
На предварительном этапе должны быть выделены и пронумерованы элементы контура объекта.
Классический способ определения угловых точек изображения объекта заключается в анализе небольшого фрагмента контура в окрестностях данной точки и в определении радиуса её кривизны. Если этот радиус окажется меньше установленного порога – это угловой элемент, в противном случае – нет. Однако, такой способ связан с очень большим объёмом вычислений. С практической точки зрения в быстродействующих АТСН, работающих в реальном масштабе времени, предпочтительным представляется более простой алгоритм. Он заключается в оценке расстояний между начальной и конечной точками фрагмента контура, т.е. между элементами контура с порядковыми номерами k – 2 и k + 2 (рис 2.6).

Пусть x (k) и y (k) абсцисса и ордината контурных элементов соответственно. Тогда решающее правило может выглядеть следующим образом:

Если условие выполняется, тогда данная точка контура принадлежит множеству угловых точек L. Здесь H – пороговое значение, выбираемое с учётом свойств изображения объектов данного класса.
При реализации вычислительной процедуры необходимо соблюдать следующие правила:
1. Если, в соответствии с условием, оказываются выделенными несколько смежных элементов контура, то решающее правило должно предусматривать выбор только одного элемента в качестве углового, например, по минимуму значения модуля разности, а в случае совпадения значений – любой из этих элементов. Это, разумеется, может привести к некоторой ошибке в определении координат углового элемента, но позволит избежать более существенной (аномальной) ошибки, связанной с неправильным определением числа углов и, следовательно, формы объекта.
2. Выделенным угловым элементам целесообразно присваивать порядковые номера, которые могут быть использованы на последующем этапе распознавания и определения ориентации объекта.
3. Процедуру анализа контурных элементов удобно осуществлять в цикле, однако два первых и два последних элемента приходится осуществлять вне цикла, так как для них не удаётся задать значения переменной k + 2 и k – 2.
Вопрос 11: ИДЕНТИФИКАЦИЯ И КЛАССИФИКАЦИЯ ИЗОБРАЖЕНИЙ. МЕТОД ПРЯМОГО СРАВНЕНИЯ С ЭТАЛОНОМ
Идентификация заключается в сравнении изображения одного объекта со всеми эталонами заданного класса. По наилучшему совпадению выносится решение об объекте. Классификация предполагает наличие изображений нескольких различных объектов. Путём сравнения этих изображений с одним из эталонов по наилучшему совпадению выбирается тот, который соответствует данному классу. Затем оставшиеся изображения сравниваются с другими эталонами и так далее, пока не будут исчерпаны все изображения объектов. Разумеется, на каждом шаге Классификации и должно выделяться изображение одного объекта, иначе задача становится практически не разрешимой. Способ прямого сравнения изображения объекта с эталонным изображением. Пусть [ Ei,j ] – исходное изображение объекта; [ Fi,j ] – эталонное изображение. Тогда алгоритм прямого сравнения имеет вид 31 где D – заданное пороговое различие.
 (31)
(31)
Если указанное условие выполняется, то объект идентифицирован, если нет - надо перейти к следующему объекту (или эталону). Такой способ чрезвычайно прост, особенно, если вычисление суммы квадратов разности заменить вычислением суммы модулей разности. Алгоритм может быть легко реализован и чисто аппаратными средствами за время, практически не превышающее время сканирования кадра телевизионным преобразователем. Однако, при наличии в реальных условиях дестабилизирующих факторов надёжность такого способа невелика, вследствие интегрального характера алгоритма. Очевидно, что при большем значении порога D различные объекты могут удовлетворять условию 31, и, следовательно, могут возникнуть ошибки, связанные с неправильной идентификацией объекта (ошибки первого рода). При уменьшении D –наоборот, могут возникнуть ошибки типа пропуска объекта (ошибки второго рода). Регулируя величину D, можно лишь менять соотношение между вероятностями возникновения ошибок первого и второго рода в соответствии с заданным критерием оптимальности.
Вопрос 12: Корреляционный метод
Этот метод основан на вычислении взаимно"корреляционных сумм между объектом и всеми эталонами (или между имеющимися объектами и каждым из эталонов). Из множества альтернативных вариантов выбирается тот объект (или тот эталон), при котором получается максимальное значение взаимно"корреляционной суммы

(32)
где k – номер альтернативы. Очевидно, что при Fi,j = Ei,j
 (33)
(33)
Удобно пользоваться нормированным значением взаимно корреляционной суммы – коэффициентом корреляции

Корреляционный метод более надёжен, однако он требует и значительно большего объёма вычислений, так как для каждой точки изображения требуется вычисление произведений Ei,j * Fi,j. Но при обработке бинарных изображений вычисление произведений практически не связано с затратами времени, поскольку перемножение однобитовых чисел сводится к простой логической операции «И». Следует иметь в виду, что оба рассмотренных выше метода требуют выполнения ряда условий: одинаковой ориентации изображений объекта и эталона, совмещения их по пространственным координатам и выдерживания одинаковых масштабов. Всё это может потребовать дополнительных вычислительных затрат. Наряду с этими недостатками укажем на необходимость хранения в памяти АТСН большого объема данных, особенно при многоальтернативном варианте решения задачи.
Вопрос 13:
Методы распознавания,
основанные на использовании системы признаков. ПОНЯТИЕ ДЕРЕВА-ГРАФА РАСПОЗНАВАНИЯ
В данном случае также используются эталоны объектов. Однако, в качестве непосредственных элементов сравнения выступают не элементы изображений объекта и эталона, а признаки объекта и эталона. Использование признаков в качестве элементов сравнения позволяет резко сократить объём данных, хранящихся в памяти системы, и время обработки информации по сравнению с вышерассмотренными методами.
Однако следует иметь в виду, что на практике в реальных условиях наблюдения выделение признаков объектов всегда осуществляется с некоторой погрешностью. Путём моделирования работы АТСН на стадии проектирования (или на этапе обучения калибровкисистемы) следует выявить характер и степень возможного рассеяния оценок используемых признаков для каждого из ожидаемых объектов (рис.3.2). 
С учётом вида полученных гистограмм устанавливаются оптимальные границы диапазонов значений того или иного признака, которые используются при формировании решающего. Очевидно, что подобные семейства гистограмм должны быть заблаговременно получены для каждого из рабочих признаков,и спользуемых при идентификации объектов. При большом числе возможных вариантов может быть рекомендован многоступенчатый (иерархический) алгоритм. При этом на каждой ступени распознавания используется какой"либо из признаков объекта (площадь, периметр, радиусы вписанных и описанных окружностей, моменты инерции, число и расположение углов и т.д.). Пусть возможны K решений (K альтернатив). Тогда алгоритм распознавания можно представить в виде дерева (графа) (рис. 3.3).
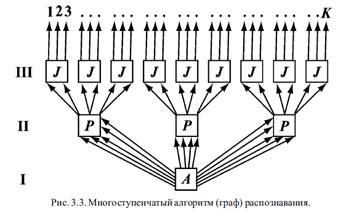
Здесь I, II, III,.. – уровни распознавания; A, P, J,.. – алгоритмы сравнения по площади, периметру, моментам инерции и т.д., включая выделение соответствующих признаков изображений объектов; 1, 2, 3,.. K – номера возможных решений. Важно отметить, что наибольший эффект сокращения времени обработки информации достигается при рациональном распределении типов используемых признаков по уровням распознавания. Так, на нижних уровнях, когда приходится иметь дело с максимальным числом вариантов, следует привлекать признаки, не требующие больших вычислительных затрат на их определение (например, площади и периметры объектов), а наиболее информативные (такие, например, как моменты инерции) – применять на верхнем уровне, где число альтернатив минимально. В разделе 4 мы более подробно познакомимся с подобным подходом на конкретном примере реализации алгоритма распознавания изображения участка звёздного неба в автономной системе астроориентации. Рис. 3.3. Многоступенчатый алгоритм (граф) распознавания.
Вопрос 14: Об измерении параметров объектов наблюдения.ОПРЕДЕЛЕНИЕ ГЕОМЕТРИЧЕСКОГО И ЭНЕРГЕТИЧЕСКОГО ЦЕНТРОВ, УГЛА РАЗВОРОТА
Очевидно, измерение размеров объекта может осуществляться посредством выделения на этапе предварительной обработки соответствующих геометрических признаков, например, площади и периметра изображения, размеров вписанных и описанных геометрических фигур (см. раздел 2.5).
Измерение пространственного положения объекта сводится к измерению координат характерных точек его изображения в приборной системе координат. Такими точками могут, например, служить геометрический или энергетический центры изображения (ф. 14, 15, 16 и ф.19).

 В случ
В случ  ае необходимости измерения координат точечных объектов в сложных условиях наблюдения при малых отношениях сигнал/шум эффективным может оказаться более сложный алгоритм интерполяции видеосигнала по методу наименьшего среднеквадратического отклонения, подробно описанный в разделе 4.1. Как указывалось выше, иногда в задачах распознавания возникает необходимость компенсации взаимного разворота изображений объекта и эталона. При этом приходится решать вспомогательную задачу – определение угла наклона главной энергетической осиизображения объекта в приборной системе координат
ае необходимости измерения координат точечных объектов в сложных условиях наблюдения при малых отношениях сигнал/шум эффективным может оказаться более сложный алгоритм интерполяции видеосигнала по методу наименьшего среднеквадратического отклонения, подробно описанный в разделе 4.1. Как указывалось выше, иногда в задачах распознавания возникает необходимость компенсации взаимного разворота изображений объекта и эталона. При этом приходится решать вспомогательную задачу – определение угла наклона главной энергетической осиизображения объекта в приборной системе координат
(рис. 3.4)
 (35)
(35)
где Jx, Jy, Jxy – промежуточные моменты инерции изображения объекта, способ вычисления которых рассмотрен в разделе 2.5 (формула 18)

Вопрос 15. АЛГОРИТМ ОПРЕДЕЛ КООРДИНАТ МАКС ОСВЕЩЕННОСТИ В ИЗОБРАЖЕНИИ ТОЧЕЧНОГО ОБЪЕКТА ПРИ ИНТЕРПОЛЯЦИИ ВИДЕОСИГНАЛА ПО МЕТОДУ НАИМЕНЬШИХ КВАДРАТОВ
при малых отношениях сигнал/шум (sш< 10) более эффективным является алгоритм интерполяции сигналов, снимаемых с отдельных элементов ПЗС-структуры по методу наименьшего среднеквадратического отклонения (НСКО). При работе ФПЗС в режиме малых сигналов от звёзд величин m ≥ñ 5 этот метод позволяет достичь большей точности измерений. На рис. 4.4

показано распределение освещённости E (x) вдоль строки элементов ФПЗС, которое преобразуется в последовательность электрических сигналов (видеоимпульсов) Q (xi), где i – номер ячейки, с которой снимается сигнал. Измерение координат изображения (которые в данном случае мы связываем с координатами максимума интерполирующей функции) сводится к восстановлению непрерывной функции Q (x)» E (x) по методу НСКО, вычислению её производной dQ (x) /dx и определению координаты x из условия dQ (x) /dx =0. (4.12) Восстановление непрерывной функции Q (x) может осуществляться путём её аппроксимации полиномом четвёртой степени по методу НСКО Q (x) = K 4 x 4 + K 3 x 3 + K 2 x 2 + K 1 x + K 0. (4.13) Известно, что весовая функция оптической системы, содержащей более четырёх поверхностей, хорошо аппроксимируется гауссоидой вращения, поэтому аналогичный полином может быть использован и для восстановлении функции вдоль оси Y. Известно, что для нахождения коэффициентов полинома Q (x) необходимо решить систему линейных уравнений вида

где: N – количество отсчётов, по которым определяются коэффициенты K 4, K 3, K 2, K 1, K 0 полинома Q (x); xi – координата геометр
|
|
|
