 |


Установки по умолчанию для различных языков интерфейса
|
|
|
|
| Язык | Единица измерения | Разница времени |
| Английский | Морские мили, узлы | 0:00 |
| Немецкий | Морские мили, узлы | 0:00 |
| Французский | Км, км/час | 0:00 |
| Испанский | Морские мили, узлы | +2:00 |
| Итальянский | Морские мили, узлы | +1:00 |
| Португальский | Морские мили, узлы | -3:00 |
| Голландский | Морские мили, узлы | 0:00 |
| Вьетнамский | Морские мили, узлы | +7:00 |
| Японский | Морские мили, узлы | +9:00 |
РЛС Печора
2.1. Назначение, технические характеристики
и состав комплекта
Судовые навигационные радиолокационные станции кругового обзора серии «Печора» предназначены для установки на судах второй и третьей групп по классификации Регистра.
Серия состоит из двух модификаций – «Печора 1» и «Печора 2». Первая работает только в режиме относительного движения, комплек-туется антенной с шириной диаграммы направленности в горизонтальной плоскости 1.9° и индикатором на ЭЛТ диаметром 230 мм.
Вторая имеет антенну с диаграммой направленности в горизонталь-ной плоскости 0.8° и индикатор на ЭЛТ диаметром 310 мм. Кроме того, она предусматривает сопряжение с прибором истинного движения (прибор Д), что обеспечивает ей режим относительного и истинного дви-жения, сопряжение с устройством «Ольха» для безопасного расхождения судов, а также укомплектована накладным отражательным планшетом, позволяющим решать задачи по расхождению судов.
Все станции серии имеют максимальную дальность действия 48 миль, работают на волне 3.2 см (частота 9430 МГц), излучают радиоимпульсы мощностью не менее 12 кВт. РЛС имеют по 8 шкал дальности: 0.5, 1.0, 2.0, 4.0, 8.0, 16.0, 32.0, 48.0 миль при цене деления неподвижных меток дальности 0.25, 0.25, 0.5, 1.0, 2.0, 4.0, 8.0, 12.0 миль соответственно. Ско-рость кругового обзора (частота вращения антенны) составляет 24 об/мин. Длительность излучаемого импульса равна 0.07 мкс на шкалах 0.5 и 1.0 мили при частоте следования 3400 имп/с, 0.25 мкс на шкалах 2.0 и 4.0 мили при частоте следования 1700 имп/с, 0.7 мкс на шкалах 8.0, 16.0, 32.0, 48.0 миль при частоте следования 850 имп/с.
|
|
|
В станциях возможна ориентировка изображения по курсу и мериди-ану, на шкалах 1.0–8.0 миль возможно смещение центра развертки до 2/3 радиуса экрана в любую точку.
Для измерения угловых положений целей имеются механический и электронный визиры направления. Измерения расстояний осуществляется с помощью неподвижных меток и подвижного визира дальности. Отсчёты направлений электронного визира и расстояний подвижного визира дальности выдаются на цифровых табло.
РЛС имеет радиоприёмник с логарифмической амплитудной характе-ристикой, чувствительность приёмника не хуже 120 дБ/Вт. В качестве гетеродина используется генератор на диоде Ганна с ручной и автомати-ческой подстройкой частоты. Промежуточная частота 60 МГц. Для борьбы с помехами от волнения и атмосферных осадков служат малая постоянная времени (МПВ) и временная автоматическая регулировка усиления (ВАРУ).
РЛС имеют максимальную дальность обнаружения при вероятности 0.8 и при высоте антенны 15 м не менее 20 миль для берега высотой 60 м, не менее 10 миль для судна вместимостью 5000 т и не менее 3 миль для среднего морского буя без радиолокационного отражателя.
Разрешающая способность по дальности не хуже 25 м. Погрешность измерения дальности не более 25 м. Разрешающая способность по направ-лению для РЛС «Печора 1» не хуже 2°, для РЛС «Печора 2» не хуже 1°. Предельная погрешность измерения направления с помощью механичес-кого визира – 1°, с помощью электронного – 0.8°.
Погрешность индикации движения собственного судна в режиме ис-тинного движения составляет по скорости не более ±5 % и по углу не более ±2.5°.
|
|
|
Мощность потребляемая от бортовой сети при питании переменным током напряжением 220 В и частотой 50 Гц составляет 620 Вт, при питании постоянным током напряжением 27 В – 480 Вт.
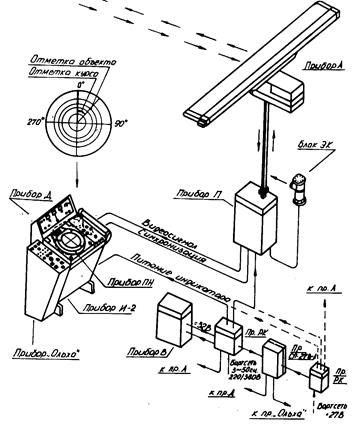
В комплект РЛС серии «Печора» входят следующие основные прибо-ры (рис. 24, 25):
|
Рис. 24. Комплект РЛС Печора 1
прибор И – индикатор;
прибор А – антенное устройство;
прибор П – приёмопередатчик;
вспомогательные приборы:
прибор В – сетевой выпрямитель;
прибор РК– распределительная коробка;
источники питания для переменного и постоянного тока;
прибор ЭК – эхокамера.
Кроме перечисленных, в состав РЛС «Печора 2» дополнительно могут входить:
прибор Д – устройство истинного движения;
прибор «Ольха» – устройство для безопасного расхождения судов;
прибор ПН – накладной планшет, необходимый для ведения ручной радиолокационной прокладки (на рисунке не показан).
|
Рис. 25. Комплект РЛС Печора 2
Функциональная схема
Функциональная схема РЛС представлена на рис. 26 основными приборами.
Прибор П содержит: тракт временной синхронизации, передатчик, тракт сверхвысокой частоты СВЧ и усилитель промежуточной частоты УПЧ, образующие приёмник.

|
Рис. 26. Схема РЛС Печора
Прибор А включает: антенное устройство А с вращающимся переходом ВП, фотоэлектронный растровый преобразователь ФРП и двигатель вращения антенны М.
В состав прибора И входят: тракт угловой синхронизации, тракт временной развертки, тракт ввода информации, тракт визира и меток дальности ВМД и тракт ЭЛТ.
П р и е м о п е р е д а т ч и к. Временная синхронизация работы станции осуществляется от задающего генератора ЗГ, который вырабатывает запускающие импульсы с частотой следования 3400 имп/с. С помощью делителя частоты в блоке управления и синхронизации УС частота следования импульсов запуска приводится к 1700 или 850 имп/с. Изменение частоты производится с пульта управления переключателем шкал дальности ШД. Кроме того, в блоке УС осуществляется необходимая временная задержка импульсов для синхронизации прибора И, ВАРУ, схемы УПЧ и запуска модулятора передатчика.
При поступлении запускающих импульсов на модулятор передатчика МП в нем формируются импульсы высокого напряжения, длительность которых регулируется переключателем ШД. Магнетронный генератор МГ под действием импульсов модулятора вырабатывает импульсы СВЧ, которые с помощью ферритового циркулятора ФЦ тракта СВЧ поступают через вращающийся переход ВП в антенну и излучаются в пространство. Отраженные от объектов импульсы СВЧ принимаются той же антенной в паузах между импульсами излучения и направляются в смеситель СМ1, где с помощью непрерывных немодулированных колебаний, вырабатываемых гетеродином на диоде Ганна ГГ, преобразуются в импульсы промежуточной частоты. В каскадах блока УПЧ, имеющего линейно-логарифми-ческую характеристику, эти колебания усиливаются и одновременно детектируются. С выхода УПЧ видеоимпульсы поступают в индикатор. Для защиты УПЧ от излучаемого импульса осуществляется его запирание импульсом подавления, который формируется в УПЧ под воздействием импульса из блока УС.
|
|
|
Для поддержания постоянства промежуточной частоты в автоматическом режиме используется схема АПЧ, которая вырабатывает управляющее напряжение для гетеродина. Это напряжение подстраивает гетеродин ГГ до тех пор, пока разностная частота генератора Ганна и магнетрона на выходе смесителя СМ2 не станет равной номинальному значению 60 МГц. В режиме ручной регулировки для управления частотой гетеродина используется напряжение потенциометра РПЧ, расположенного на панели управления.
Для передачи на индикатор данных об угловом положении антенны используется фотоэлектронный растровый преобразователь ФРП, установленный на валу антенны. За один оборот антенны он вырабатывает две серии по 1800 импульсов с относительным сдвигом по фазе на 90° и специальный «нулевой» импульс, появляющийся при совпадении направления излучения антенны с диаметральной плоскостью судна. «Нулевой» импульс используется для формирования импульса отметки курса и обнуления счётчика угла антенны.
И н д и к а т о р. Основными устройствами индикатора являются тракты угловой синхронизации, временной развертки и ввода информации.
|
|
|
В тракт угловой синхронизации входят: формирователь импульсов антенны ФИА, тактовый генератор ТГ, счетчик угла антенны СУА, сумматор импульсов антенны и гирокомпаса САГ, блок аналоговой памяти АП1 и синусно-косинусный генератор СКГ. С помощью этих блоков формируются управляющие напряжения для модуляции пилообразных импульсов развёртки сигнала. Кроме того в тракт угловой синхронизации входят: формирователь импульсов визира ФИВ, счётчик угла визира СУВ, сумматор импульсов визира и гирокомпаса СВГ, блок аналоговой памяти АП2, с помощью которых формируются управляющие напряжения для модуляции пилообразных импульсов развёртки электронного визира направления, а также формирователь импульсов гирокомпаса ФИК со счетчиком угла компаса СУК, с помощью которых осуществляется связь с гирокомпасом.
В тракт временной развёртки входят: генератор линейно изменяющегося напряжения ГЛИН, модулятор, синхронный коммутатор СК с делителем частоты запускающих импульсов ДЧ, который на каждый 50–й ход развертки переключает модулятор с блока АП1 на блок АП2, а также формирователь импульсов подсвета ФИП.
Радиальная развёртка луча осуществляется с помощью пилообразных импульсов, поступающих с модулятора на неподвижные взаимно перпендикулярные катушки КОХ и КОY. Угловое положение луча на экране ЭЛТ определяется соотношением амплитуд этих импульсов в катушках, которые в свою очередь определяются соотношением значений управляющих напряжений, выработанных блоками аналоговой памяти. Блок АП1 определяет угловое положение развертки сигнала, а блок АП2–угловое положение электронного визира направления. На каждый блок аналоговой памяти от синусно-косинусного генератора СКГ с частотой 1200 Гц подаётся по два сдвинутых по фазе на 90° синусоидальных напряжения (рис. 27). Блоки аналоговой памяти на время одного периода запоминают мгновенные значения напряжений СКГ в момент прихода импульсов антенны и визира.

|
Рис. 27. Запоминание угла поворота антенны РЛС Печора
При неподвижной антенне СУА считает только импульсы тактового генератора ТГ, частота которых 4.32 МГц. На выходе счётчика угла антенны СУА при его емкости 3600 имп/с в этом случае вырабатывается 1200 имп/с, так как частота импульсов и частота напряжений СКГ одинаковы (периоды Т1 и Т3 одинаковы). В связи с тем, что колебания тактового генератора синхронизированы синусно-косинусным генератором, фазовый сдвиг тактовых импульсов после счетчика угла антенны по отношению к напряжениям синусно-косинусного генератора постоянен. На выходе АП1 получаются два постоянных напряжения (линии 4 и 5 до момента t1), которые, модулируя пилообразные импульсы развёртки, дают засветку луча на одном и том же месте.
|
|
|
При вращающейся антенне к импульсам тактового генератора 1 добавляются импульсы антенны, идущие от датчика через формирователь ФИА. Период повторения импульсов СУА и период колебаний СКГ становятся неодинаковыми (периоды Т1 и Т2). Фазовый сдвиг между импульсами СУА и напряжениями СКГ меняется, и на выходе АП1 получаются два напряжения, изменяющиеся по закону синуса и косинуса угла поворота антенны (линии 4 и 5 после момента t1). За один оборот антенны вырабатывается полный цикл изменения этих напряжений.
Формирователь импульсов антенны вырабатывает 3600 импульсов за один оборот антенны, что обеспечивает передачу вращения антенны на индикатор с точностью 0.1о.
Аналогичным образом на блоке АП2 вырабатываются управляющие напряжения для электронного визира направления. В отсутствии импульсов формирователя ФИВ счетчик угла визира считает только тактовые импульсы. При емкости 3600 имп/с СУВ вырабатывает 1200 имп/с с постоянным фазовым сдвигом относительно напряжений СКГ. Блок АП2 вырабатывает два постоянных напряжения и луч визира высвечивается на одном и том же месте.
Если необходимо сделать угловое перемещение визира направления, то к импульсам тактового генератора добавляются импульсы формирователя ФИВ, полярность которых определяется направлением перемещения визира. Фазовый сдвиг между импульсами СУВ и напряжениями СКГ при этом меняется в ту или иную сторону, меняются управляющие напряжения, модулирующие амплитуды импульсов развертки визира и меняется угловое положение электронного визира направления. Угловое перемещение визира продолжается до тех пор, пока включен в работу формирователь импульсов визира.
Для связи РЛС с гирокомпасом в индикаторе установлены: формирователь импульсов гирокомпаса ФИК, счетчик угла компаса СУК, сумматор импульсов антенны и гирокомпаса САГ и сумматор импульсов визира и гирокомпаса СВГ.
Формирователь импульсов гирокомпаса преобразует аналоговые данные гирокомпаса в серию импульсов с полярностью, зависящей от направления изменения курса. На счетчике угла компаса эти импульсы суммируются с учетом знака с тактовыми импульсами и на его выходе появляются импульсы, характеризующие курс собственного судна.
В режиме «курс» изображение на экране индикатора ориентировано относительно курса своего судна, при этом блок САГ не имеет разрешения на суммирование. Аналоговая память АП1 управляется только импульсами антенны и отображает развёртку согласно с курсовым углом разворота антенны.
На блоке СВГ запрет на суммирование снят. Аналоговая память АП2 управляется импульсами визира и гирокомпаса, и положение электронного визира направления указывает на индикаторе курсовой угол, значение которого высвечивается на цифровом табло.
В режиме «север» изображение ориентировано относительно меридиана. Сумматор САГ получает разрешение на суммирование. Аналоговая память АП1 получает дополнительные импульсы от гирокомпаса, и развертка на экране индикатора дополнительно разворачивается на угол, равный истинному курсу.
Аналоговая память АП2 управляется теми же импульсами, что и в режиме «курс». Положение электронного визира направления при смене ориентировки не меняется, поэтому в режиме «север» оно будет определять истинный пеленг.
В режиме «согласование» блоки САГ и СВГ не имеют разрешения на суммирование. Изображение на экране индикатора ориентировано по курсу. Электронный визир направления используется для согласования индикатора с данными гирокомпаса. Формирователь импульсов визира изменяет состояние счетчика угла визира до тех пор, пока электронный визир направления не установится на курс судна. Отсчет курса снимается с цифрового табло.
Яркостная модуляция луча на экране ЭЛТ осуществляется через тракт ввода информации. Этот тракт содержит видеопроцессор, с помощью которого усиливаются видеоимпульсы приёмника, и видеосмеситель, на котором видеоимпульсы приёмника (эхо-сигналы) смешиваются с импульсами неподвижных меток дальности МД, подвижного кольца (визира) дальности ПВД, отметки курса ОК, подсветки основной развёртки, развёртки электронного визира направления и дополнительными импульсами от приборов, сопрягаемых с РЛС (прибор «Ольха», морской запросчик-ответчик МЗО и др.).
Импульсы подсвета развертки и развертки визира направления создаются формирователем ФИП, находящимся в тракте временной развёртки, под действием импульса развёртки ГЛИН и импульса делителя частоты ДЧ 1:50. Их яркость регулируется с помощью рукояток «яркость развертки» и «яркость ЭВН» на видеосмесителе ВСМ. Яркость вспомогательных меток регулируется в соответствующих блоках.
Видеопроцессор ВПР работает в двух режимах: автоматическом и ручном. При ручном режиме работы (клавиша «видеопроцессор» на панели управления в положении отключено) видеопроцессор работает как обычный видеоусилитель. Цепи ВАРУ и МПВ, имеющиеся в видеоусилителе и улучшающие различимость целей при наличии помех от дождя и волнения, управляются с пульта вручную.
При автоматическом режиме (клавиша «видеопроцессор» на панели управления в положении включено) цепи ВАРУ и МПВ отключаются от ручного управления и переходят на автоматическое. При этом схема МПВ работает с фиксированной постоянной времени, а схема ВАРУ вырабатывает сигнал управления, амплитуда которого изменяется автоматически в зависимости от уровня видеоимпульсов и интенсивности отражения от волн на каждом ходу развертки
Вспомогательные метки: МД, ПВД, ОК вырабатываются в тракте ВМД. Для формирования меток дальности используется генератор тактовых импульсов ГТИ (647.5 кГц) с делителем частоты ДЧ, который управляется переключателем шкал дальности и изменяет цену деления меток дальности. В блоке МД формируются метки и регулируются их яркость. Для формирования визира дальности используется схема регулируемой задержки СВЗ. Аналого-цифровой преобразователь преобразует временную задержку в цифровой код для регистрации на цифровом табло ЦТ.
Отметка курса вырабатывается в блоке ОК, на который от антенного датчика подаётся кратковременный импульс в момент прохождения луча антенны через диаметральную плоскость судна.
Смещение центра развёртки осуществляется путем подачи постоянных напряжений на катушки смещения КСХ и КСY. Управляющие напряжения на блоке смещения изменяются либо вручную рукоятками «смещение центра», либо под воздействием Д – прибора истинного движения.
Управление РЛС
Расположение органов управления РЛС приведено на рис. 28, 29.
1. Переключатель 'отключено–готовность–работа'.
2. Рукоятка 'усиление'.
3. Рукоятка ручной–автоматической подстройки частоты.
4. Рукоятка помехозащиты 'дождь'.
5. Рукоятка помехозащиты 'волны'.
6. Рукоятка регулировки яркости ЭВН.
7. Рукоятка регулировки яркости развертки.

|
Рис. 28. Панель управления РЛС Печора 1
8. Рукоятка регулировки яркости ПКД.
9. Рукоятка регулировки яркости НКД.
10. Клавиша 'смещение центра'.
11. Рукоятка 'смещение центра по X'.
12. Рукоятка 'смещение центра по Y'.
13. Переключатель 'шкала–интервал'.
14. Регулятор яркости подсвета панели управления.
15. Шкала курсов и пеленгов.
16. Клавиша 'маяк', необходимая для временного отключения засветок радиолокационных маяков-ответчиков.
17. Клавиша 'ОК', необходимая для временного отключения отметки курса.
18. Клавиша 'контроль энергетической характеристики'.
19. Клавиша 'видеопроцессор', необходимая для переключения между автоматическим и ручным способами помехозащиты.
20. Переключатель 'курс–север–согласование'.
21. Рукоятка механического визира направления.
22. Рукоятка электронного визира направления.
23. Рукоятка подвижного визира дальности.

|
Рис. 29. Панель управления РЛС Печора 2
24. Цифровое табло электронного визира направления.
25. Цифровое табло шкал дальности–интервалов.
26. Цифровое табло подвижного визира дальности.
27. Клавиша 'подогрев антенны'.
28. Индикатор усиления (качества работы РЛС).
29. Лампа 'высокое вкл.', необходимая для контроля режима 'работа' (излучения) РЛС.
30. Экран ЭЛТ.
31. Рукоятка регулировки яркости сигнала морского запросчика–ответчика.
Включение РЛС в работу и регулировку в процессе работы производят в следующем порядке:
– подать на станцию напряжение бортовой сети. В приборах питания должны засветиться контрольные лампы;
– включить станцию. Для этого переключатель 'отключено–готовность–работа' установить в положение 'готовность'. После 3–4 минутного прогрева перевести его в положение 'работа'. На экране появится радиально–круговая развертка и вспомогательные метки: отметка курса, метки дальности и электронный визир направления;
– установить необходимую яркость подсветки панели, яркость развертки и яркость вспомогательных меток соответствующими органами управления (см. рис. 28, 29);
– проверить возможность перемещения подвижного визира дальности визуально и по цифровому табло;
– проверить возможность перемещения электронного визира направления визуально и по цифровому табло;
– проверить работу схемы ориентировки изображения и провести согласование РЛС с гирокомпасом. Для этого переключатель 'курс–север–согласование' поставить в положение 'согласование'. С помощью ЭВН выставить на цифровом табло значение истинного курса по данным репитера гирокомпаса;
– проверить смещение центра развертки. Для этого перейти на одну из шкал дальности в пределах 8 миль. Нажать клавишу 'смещение центра' и рукоятками 'смещение центра по X' и 'смещение центра по Y' проверить перемещение центра в любую сторону до 2/3 радиуса экрана ЭЛТ. Если переключатель 'отключено–готовность–работа' был установлен в положение 'работа', минуя положение 'готовность', то через 4 мин с момента подачи питания автоматически включится передатчик, о чем сигнализирует сигнальная лампа 'высокое вкл.'. На экране появятся изображения объектов в зоне обзора станции;
– отрегулировать изображение рукоятками 'усиление', 'волны' и 'дождь';
– если схема АПЧ имеет недостаточную настройку, то нужно включить РПЧ и по изображению на экране произвести подстройку частоты гетеродина;
– при необходимости отключить СВЧ излучение преключатель 'отключено–готовность–работа' перевести в положение 'готовность';
– выключение станции производится переводом переключателя 'отключено–готовность–работа' в положение 'отключено' и выключением напряжения бортовой сети.
РЛС DECCA
|
|
|
