 |


тактико-технических характеристик
|
|
|
|
РЛС обнаружения»

 Студент________________________(______________)
Студент________________________(______________)
 Группа ________________________(______________)
Группа ________________________(______________)
 Взвод _________________________ (______________)
Взвод _________________________ (______________)

 Руководитель __________________ (______________)
Руководитель __________________ (______________)
 Рецензент____________________ __(______________)
Рецензент____________________ __(______________)
Москва 2014
 ЗАДАНИЕ
ЗАДАНИЕ
Необходимо обосновать и рассчитать тактико-технические характеристики радиолокационной станции обнаружения воздушных целей мобильного автономного ЗРК, используя нормы и рекомендации ICAO, государственные и международные стандарты, выбрать недостающие технические и тактические характеристики, обосновать их выбор,а также разработать структурную схему СОЦ и обосновать выбор ее элементов.
Исходные данные:
| Вариант | |
| Тип цели | А - 10 |
| Скорость цели, Vц, м/с | |
| Частота повторения, Fп, Гц | |
| Условная вероятность ложной тревоги, Рлт | 10-4 |
| Условная вероятность правильного обнаружения, Рпо, | 0.7 |
| Максимальная приборная дальность действия РЛС, Дмакс, м | |
| Ширина ДНА по азимуту, θβ, град | 1.4 |
| Ширина ДНА по углу места, θε, град | 5,5 |
| Длина волны, λ, м | 0.082 |
| Длительность импульса, τ, мкс | 0.5 |
| Импульсная мощность, Ри, кВт | |
| Среднее значение ЭПР цели, δц | 18,2 |
СОДЕРЖАНИЕ 
ВВЕДЕНИЕ. 5
1. Тактико-технические данные радиолокационных станций. 6
1.1 Зона обнаружения РЛС.. 6
1.2 Максимальная дальность действия РЛС.. 6
1.3 Минимальная дальность действия РЛС.. 7
1.4 Время обзора зоны действия РЛС.. 7
1.5 Точность определения координат целей. 8
1.6 Среднеквадратичная ошибка. 9
1.7 Средняя ошибка. 9
1.8 Нормальный закон распределения случайных ошибок. 9
1.9 Вероятная ошибка. 10
1.10 Максимальная ошибка. 10
1.11 Ошибки определённой вероятности. 10
1.12 Точность измерения дальности. 11
1.13 Точность измерения азимута. 12
|
|
|
1.14 Точность измерения угла места. 12
1.15 Помехозащищенность РЛС.. 13
1.16 Разрешающая способность по дальности. 14
1.17 Разрешающая способность по азимуту. 15
1.18 Разрешающая способность по углу места. 15
1.19 Разрешающая способность по высоте. 15
1.20 Разрешающий объем РЛС.. 16
2. Передающая система. 17
2.1 Длина волны. Частота. 17
2.2 Мощность. Средняя мощность. 17
2.3 Период повторения. Частота повторений. 18
2.4 Длительность импульса. 18
2.5 Форма спектра и его ширина. 19
2.6 Эффективная ширина спектра. 19
2.7 Понятие модуляции. 21
2.8 КПД.. 23
3. Приемная система РЛС.. 23
 3.1 Чувствительность приемника. 23
3.1 Чувствительность приемника. 23
3.2 Коэффициент шума. 24
3.3 Полоса пропускания. 24
3.4 Коэффициент усиления. 25
3.5 Динамический диапазон. 25
4 Волноводная (фидерная) система. 27
4.1 Ширина диаграммы направленности. 28
4.2 КНД и усиления антенны, эффективная площадь антенны.. 28
5. Расчет максимальной дальности РЛС.. 30
6. Выбор и обоснование структурной схемы СОЦ.. 30
ВЫВОД.. 34
СПИСОК ЛИТЕРАТУРЫ.. 35
ВВЕДЕНИЕ 
Радиолокация - область радиотехники, обеспечивающая радиолокационное наблюдение различных объектов, то есть их обнаружение, измерение координат и параметров движения, а также выявление некоторых структурных или физических свойств путем использования отраженных или переизлученных объектами радиоволн либо их собственного радиоизлучения.
Информация, получаемая в процессе радиолокационного наблюдения, называется радиолокационной. Радиотехнические устройства радиолокационного наблюдения называются радиолокационными станциями (РЛС) или радиолокаторами. Сами же объекты радиолокационного наблюдения именуются радиолокационными целями или просто целями. При использовании отраженных радиоволн радиолокационными целями являются любые неоднородности электрических параметров среды (диэлектрической и магнитной проницаемостей, проводимости), в которой распространяется первичная волна. Сюда относятся летательные аппараты, всевозможные военные объекты и т. п. Особым видом радиолокационных целей являются астрономические объекты.
|
|
|
Источником радиолокационной информации является радиолокационный сигнал. В зависимости от способов его получения различают следующие виды радиолокационного наблюдения.
Радиолокация с пассивным ответом, основанная на том, что излучаемые РЛС колебания - зондирующий сигнал - отражаются от цели и попадают в приемник РЛС в виде отраженного сигнала. Такой вид наблюдения иногда называют также активной радиолокацией с пассивным ответом.
Радиолокация с активным ответом, именуемая активной радиолокацией с активным ответом, характеризуется тем, что ответный сигнал является не отраженным, а переизлученным с помощью специального ответчика - ретранслятора. При этом заметно повышается дальность и контрастность радиолокационного наблюдения.
Пассивная радиолокация основана на приеме собственного радиоизлучения целей, преимущественно миллиметрового и сантиметрового диапазонов. Если зондирующий сигнал в двух предыдущих случаях может быть использован как опорный, что обеспечивает принципиальную возможность измерения дальность и скорости, то в данном случае такая возможность отсутствует.
Большинство РЛС с импульсной модуляцией имеет одну антенну, снабженную специальным антенным переключателем для перехода из режима передачи в режим приема и наоборот.
Наряду с простыми радиоимпульсами может применяться внутриимпульсная частотная модуляция и фазовая манипуляция. Другим видом зондирующего сигнала является непрерывный. Здесь наряду с незатухающими гармоническими колебаниями могут использоваться частотно-модулированные и др.
Приемник РЛС необходим для оптимального выделения полезного сигнала из помех (так называемая первичная обработка сигнала). Оконечное (выходное) устройство служит для представления радиолокационной информации в нужной потребителю форме. Если потребителем является человек-оператор, то используется визуальная индикация. Для потребителя в виде вычислительного устройства непрерывного действия оконечным является устройство автоматического сопровождения цели по измеряемому параметру (дальность, угловые координаты, скорость), и полезная информация выдается в виде напряжений или токов, функционально связанных с этими параметрами. Если же оконечным устройством является ЭВМ, то радиолокационная информация преобразовывается в двоичный код. При этом в ЭВМ происходит дальнейшая, так называемая вторичная обработка сигнала.
|
|
|
 |
1. Тактико-технические данные радиолокационных станций
Тактико-техническими данными РЛС являются данные, характеризующие ожидаемую эффективность боевого использования станций при решений конкретных тактических задач. Соответственно тактическому назначению различают радиолокационные станции:
· предупреждения;
· дальнего обнаружения;
· обнаружения и наведения;
· целеуказания;
· наведения ракет и др.;
РЛС одного назначения могут определять различное число координат и характеристик цели.
Наиболее важные тактико-технические данные РЛС:
· пределы работы станции по дальности;
· пределы работы станции по угловым координатам;
· период обзора;
· разрешающие способности станции;
· помехозащищенность станции;
· нормативы боевого обслуживания (время развертывания, включения, свертывания и т. п.);
· климатические условия боевого использования.
1.1 Зона обнаружения РЛС
Зоной обнаружения станции называется пространство, в пределах которого станция обнаруживает цели с заданной вероятностью и измеряет координаты цели с требуемой точностью.
Дальность обнаружения зависит от высоты цели. Нп - высотный потолок станции. В зоне обзора возможно определение целей на высотах
Н >Нп. Нмин - высота цели, на которой низколетящая цель обнаруживается на заданной дальности.
Графически зона обнаружения в вертикальной плоскости представляется в координатах высота Н - дальность Д. Дальность действия различна для разных углов места s. Вид зоны обнаружения зависит от целевого назначения станции и принятых технических решений в станции.
1.2Максимальная дальность действия РЛС
|
|
|
Пределы работы РЛС по дальности определяются максимальной Дмакс и минимальной Дмин дальностью действия.
Максимальная дальность действия (например, обнаружения) задается тактическими требованиями. Ориентировочно она может быть оценена при помощи основного уравнения радиолокации.
Максимальная дальность действия зависит от многих технических характеристик РЛС, условий распространения радиоволн и характеристик цели, которые в реальных условиях боевого использования станций подвержены случайным изменениям. Для рассчитываемой мною станции Дмакс составляет 11000 м.
1.3 Минимальная дальность действия РЛС
Минимальная дальность обнаружения Дмин станции зависит от пределов работы антенной системы по углу места ε. Она различна для различных высот и определяет величину мертвой воронки.
Дмин= 
В наземных РЛС при малых углах места реальное значение Дмин может определяться засветами экрана индикатора в начале развертки отражениями от местных предметов.
Если антенная система не вносит ограничений, то минимальная дальность действия РЛС определяется длительностью импульса τи, временем восстановления антенного переключателя τв и разрешающей способностью индикаторного устройства δДИ:
Дмин≈  (τи+τв)+δДи=
(τи+τв)+δДи=  (2)
(2)
τb- время восстановления антенного переключателя, tв = 0.2Чtи.
1.4 Время обзора зоны действия РЛС
Периодом обзора станции Tобз называется интервал времени, необходимый для облучения всех точек пространства зоны обзора станции.
Непрерывность и требуемая четкость индикации отражённых сигналов обеспечивается при условии
Тобз≥  (3)
(3)
где,
Тобз – в сек;
Nимин-минимальное число отражённых от цели импульсов, необходимое для обнаружения цели с заданной вероятностью (Nu мин = 3 ÷ 25);
Fи- частота повторения импульсов;
Δβ - сектор обзора станции в горизонтальной плоскости;
Δε- сектор обзора в вертикальной плоскости;
φ0,5, θ0,5- ширина диаграммы направленности антенны соответственно в горизонтальной и вертикальной плоскостях на уровне 0,5 по мощности.
В РЛС обнаружения и целеуказанияΔε= θ0,5 и
Тобз≥  (4)
(4)
Период обзора определяет интервал между двумя последовательными изменениями координат цели. При современных скоростях целей плавность перемещения отметок на экранах индикаторов и точность  воспроизведения траекторий целей том выше, чем меньше период обзора.
воспроизведения траекторий целей том выше, чем меньше период обзора.
Один из путей сокращения периода обзора — увеличение углов раствора диаграммы направленности антенны станции. Однако для улучшения разрешающей способности и повышения точности определения координат необходимы узкие диаграммы направленности.
|
|
|
Противоречия преодолеваются путем компромиссного выбора диаграммы направленности и способа обзора пространства.
В станциях с круговым обзором пространства период обзора равен времени полного оборота антенной системы, т. е.
Тобз=  (5)
(5)
где nА — число оборотов антенны в минуту.
РЛС могут иметь секторный обзор как по азимуту, так и по углу места. Обзор в секторе по углу места может производиться одним лучом или несколькими лучами (рис.З), каждым в своей зоне. Во втором случае период обзора сокращается.

Рис.3 Измерение угла места цели
При винтовом обзоре (Рис.4) возможно осуществить круговой обзор в зоне. Период обзора зоны равен времени нескольких оборотов антенны, необходимых для обзора зоны, т. е.
Тобз=  , (6)
, (6)
где Δεз - сектор зоны.
Полный период обзора, если зоны одинаковы и режим обзора не меняется от зоны к зоне, равен
Тобз= nзkр, (7)
nз-число зон;
kр - коэффициент, учитывающий время, необходимое на реверсирование движения антенны;
он зависит от числа зон, последоват  ельности и способа перехода от зоны к зоне kр=1
ельности и способа перехода от зоны к зоне kр=1 
1.5 Точность определения координат целей
О точности определения координат целей при помощи РЛС судят по величине ошибок измерения координат.
Ошибки по источникам их возникновения делят на внешние и инструментальные, а по закономерности их возникновения — на грубые, систематические и случайные.
Грубые ошибки или промахи, возникающие в результате просчетов, легко исключаются. Считается, что хорошо обученный расчет РЛС их не допускает.
Систематические ошибки в процессе работы РЛС остаются постоянными или изменяются по известному закону. Эти ошибки могут быть заранее определены и учтены. Личный состав, обслуживающий РЛС, должен знать источники возможных систематических ошибок и всегда устранять причины возникновения последних, а допущенные ошибки уметь оценить и внести в результаты измерений необходимые поправки.
Систематические ошибки, как правило, являются инструментальными. Они обусловливаются точностью настроек и регулировок, состоянием аппаратуры, ошибками привязки и ориентирования РЛС на местности, степенью обученности операторов и т. п. Систематические ошибки могут быть и внешними. К таким ошибкам относятся:
· ошибки, обусловленные влиянием земли и местных предметов;
· ошибки вследствие влияния на распространение волн конкретных климатических условий;
· ошибки, обусловленные характером и маневром цели.
Случайные ошибки — это неизбежные ошибки, возникающие из-за случайного характера всех процессов в блоках и узлах РЛС, распространения радиоволн, отражения от целей, наблюдения за экраном и т. п.
Случайные ошибки действующих РЛС определяются путем предварительных испытаний. Именно случайные ошибки и определяют точность измерения координат цели.
Для оценки случайных ошибок пользуются среднеквадратичной о, срединной (вероятной) и максимальной ошибками.
Практически часто пользуются также ошибкой, характеризующейся определенной вероятностью ее появления.
1.6 Среднеквадратичная ошибка
Среднеквадратичная ошибка
 (8)
(8)
где xi = аi - X — случайная ошибка i-того измерения;
аi — результат i-того измерения;
X—истинное значение измеряемой координаты;
n — число измерений.
Она подсчитывается с  достаточной точностью даже при сравнительно небольшом числе измерений (
достаточной точностью даже при сравнительно небольшом числе измерений ( ).
).
Если известны среднеквадратичные ошибки  ,
,  ,...
,...  , обусловленные различными независимыми источниками, общая среднеквадратичная ошибка
, обусловленные различными независимыми источниками, общая среднеквадратичная ошибка

1.7 Средняя ошибка
Средняя ошибка равна среднему арифметическому из абсолютных значений случайных ошибок ряда измерений, т.е.
 (10)
(10)
1.8 Нормальный закон распределения случайных ошибок
Случайные ошибки имеют нормальный закон распределения:
 (11)
(11)
где,
 - плотность вероятности случайных ошибок;
- плотность вероятности случайных ошибок;
х - случайная ошибка;
 - среднеквадратичная ошибка.
- среднеквадратичная ошибка.


Рис.4. Нормальный закон распределения вероятностей случайных ошибок
Графически нормальный закон распределения случайных ошибок изображён на рис.5. При более точных измерениях ошибки измерения меньше, но в любом случае
 (12),
(12),
а поэтому плотность вероятности ошибок вблизи  . Появление положительных и отрицательных ошибок равновероятно.
. Появление положительных и отрицательных ошибок равновероятно.
Вероятность определённой ошибки xk определяется уравнением
 (13)
(13)
Например, вероятность среднеквадратичной ошибки Р()= 0.683. Это значит, что из всех произведённых измерений в 68,3% из них ошибка не превышает , а в 31,7% измерениях ошибка больше среднеквадратичной.
1.9 Вероятная ошибка
Вероятной хв, или срединной ошибкой называют такое ее значение, по отношению к которому равновероятны случайные ошибки как большие, так и меньшие ее. Вероятность срединной ошибки Р(хв)=0,5. Следовательно, 50% измерений имеют ошибку меньше хв, а 50% измерений — больше хв.
Вероятная ошибка находится в следующем соотношении со среднеквадратичной:
 . (14)
. (14)
1.10 Максимальная ошибка
Максимальная ошибка — это наибольшая случайная ошибка, которая возможна при определенных условиях измерений. Ее принимают равной
xмакс=4xв. (15)
Следовательно,
xмакс ≈ 3
Вероятность максимальной ошибки для данного ряда измерений Р(хмакс)=0,993. Следовательно, только 0,7% измерений имеют ошибку более хмакс.
1.11 Ошибки определённой вероятности
Часто для оценки точности определения координат целей при помощи. радиолокационных станций пользуются статистическими ошибками, установленными на  основании специальных статистических измерений. В таких случаях производится большое число измерений координат целей и после математической обработки определяется, что в n % измерений из всего числа измерений ошибка xn не превышает такое-то значение.
основании специальных статистических измерений. В таких случаях производится большое число измерений координат целей и после математической обработки определяется, что в n % измерений из всего числа измерений ошибка xn не превышает такое-то значение.
Наиболее часто даются ошибки для 85 % или 95% измерений. Эти ошибки, естественно, находятся в определенном соотношении со среднеквадратичной ошибкой, а именно:

а

Ошибками определенной вероятности удобно пользоваться в повседневной практической работе. В теоретических исследованиях и при технических расчетах обычно пользуются среднеквадратичной и другими ошибками.
1.12 Точность измерения дальности
Современная теория измерения параметров радиолокационных сигналов позволяет с точностью, достаточной для практических целей, оценить ошибки измерения координат целей.
Точность измерения дальности зависит от точности измерения запаздывания отраженного сигнала, ошибок из-за неоптимальности обработки сигнала, от наличия неучтенных запаздываний сигнала в трактах передачи, приема и индикации, от случайных ошибок измерения дальности в индикаторных устройствах.
Ошибки в индикаторных устройствах обусловливаются нестабильностью масштабных меток и ошибками считывания. Последние складываются из ошибки определения центра отметки и ошибки интерполирования.
Потенциальная точность измерения дальности радиолокационной станцией характеризуется среднеквадратичной ошибкой  равной
равной
 (16)
(16)

Рис.5. Характеристика обнаружения в случае слабого сигнала с постоянной амплитудой



где  — значение коэффициента различимости для одного импульса.
— значение коэффициента различимости для одного импульса.
Среднеквадратичная ошибка измерения дальности  естественно, больше потенциальной среднеквадратичной ошибки
естественно, больше потенциальной среднеквадратичной ошибки  . Она равна
. Она равна
 (17)
(17)
где  - коэффициент ухудшения точности реальной РЛС.
- коэффициент ухудшения точности реальной РЛС.
Для различных РЛС =1,5  15.
15.
Коэффициент может быть представлен в виде:

где
 - ошибка из-за искривления траектории распространения радиоволн;
- ошибка из-за искривления траектории распространения радиоволн;
 - Ошибка на i- том устройстве станции.
- Ошибка на i- том устройстве станции.
Достаточная точность расчета ошибки получается и в том случае, если принять.

где  - среднеквадратичная ошибка индикатора.
- среднеквадратичная ошибка индикатора.
 1.13 Точность измерения азимута
1.13 Точность измерения азимута
Систематические ошибки в измерении азимута могут возникнуть при неточном ориентировании антенной системы РЛС и вследствие несоответствия между положением антенны и электрической масштабной шкалой азимута цели обуславливаются нестабильностью работы системы вращения антенны, нестабильностью схемы формирования отметок азимута, а также ошибками считывания.
Среднеквадратичная ошибка измерения азимута
 (20)
(20)
Где  - коэффициент ухудшения точности определения азимута реальной РЛС; он определяется по формулам, аналогичным формулам для определения ;
- коэффициент ухудшения точности определения азимута реальной РЛС; он определяется по формулам, аналогичным формулам для определения ;
 - в градусах.
- в градусах.
1.14 Точность измерения угла места
Точность измерения угла места определяется практически теми же факторами, что и точность измерения азимута. Среднеквадратичную ошибку измерения угла места можно оценить по формуле, подобной:
 (21)
(21)
где  - в градусах;
- в градусах;
 - коэффициент ухудшения точности определения угла места реальной РЛС.
- коэффициент ухудшения точности определения угла места реальной РЛС.
1.15 Помехозащищенность РЛС
Под помехозащищенностью РЛС понимают ее способность сохранить ТТХ при воздействии различных радиопомех.
Воздействие помех проявляется в понижении отношения энергией сигнал/шум на входе приемного устройства РЛС.
Вследствие этого цели обнаруживаются с заданной вероятностью на меньших дальностях или вовсе не обнаруживаются.
Количественные критерии для оценки помехозащищенности РЛС могут быть самые различные.
Обычно оценивают помехоустойчивость станции по дальности действия ее воздействия
помех.

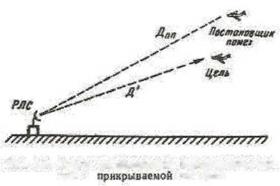
 Рис. 6. Схема расположения постановщика помех и прикрываемой им цели.
Рис. 6. Схема расположения постановщика помех и прикрываемой им цели.

Под воздействием помех дальность действия незащищенной РЛС может настолько понижаться, что ее практически можно считать полностью подавленной помехами. Поэтому предпринимаются различные меры для повышения помехозащищенности станций.
Как указывается в литературе, помехозащищенность РЛС обеспечивается:
· Работой станции в широком диапазоне частот и быстрой перестройкой частоты;
· Многоканальным построение станции;
· Высоким энергетическим потенциалом станции;
· Снижением уровня боковых лепестков диаграммы направленности антенны;
· Сменой частоты повторения импульсов;
· Управлением поляризацией изучаемого сигнала;
· Расширением динамического диапазона приемно-индикаторного тракта;
· Применением различных устройств и схем защиты в тракте приема и обработки сигнала.
 1.16 Разрешающая способность по дальности
1.16 Разрешающая способность по дальности


Разрешающая способность РЛС с внутриимпульсной частотной модуляцией и сжатием импульса при обработке отраженного сигнала определяется длительностью «сжатого» импульса тис» т. е.

Разрешающая способность РЛС с фазо-кодовой манипуляцией определяется длительностью кодового интервала тик» т. е,

1.17 Разрешающая способность по азимуту
Разрешающей способностью РЛС по азимуту  называется разность азимутов предельно близких друг к другу целей, находящихся на одинаковой дальности и одинаковых высотах, при которой еще возможно раздельное измерение азимута каждой цели:
называется разность азимутов предельно близких друг к другу целей, находящихся на одинаковой дальности и одинаковых высотах, при которой еще возможно раздельное измерение азимута каждой цели:


1.18 Разрешающая способность по углу места
 Разрешающей способностью РЛС по углу места называют разность углов места предельно близких друг к другу целей, находящихся на одинаковых дальностях и под одним азимутом, при которой еще возможно раздельное измерение угла места каждой цели. Разрешающая способность
Разрешающей способностью РЛС по углу места называют разность углов места предельно близких друг к другу целей, находящихся на одинаковых дальностях и под одним азимутом, при которой еще возможно раздельное измерение угла места каждой цели. Разрешающая способность  РЛС с качанием луча в вертикальной плоскости равна
РЛС с качанием луча в вертикальной плоскости равна

1.19 Разрешающая способность по высоте
Разрешающей способностью по высоте обладают РЛС с высокой разрешающей способностью по углу места, в частности использующие метод парциальных диаграмм или метод качания луча вертикальной плоскости для определения высоту.
Разрешающей способностью РЛС по высоте называют минимальную разность высот двух целей, находящихся на одном удалении и под одним азимутом, при которой высота каждой цели измеряется еще раздельно


1.20 Разрешающий объем РЛС
 Разрешающим (импульсным) объемом РЛС называют объем части пространства в зоне обзора станции, ограниченный расстояниями, равными разрешающим способностям станции по дальности и угловым координатам. Он равен
Разрешающим (импульсным) объемом РЛС называют объем части пространства в зоне обзора станции, ограниченный расстояниями, равными разрешающим способностям станции по дальности и угловым координатам. Он равен

Цели, находящиеся в пределах разрешающего объема РЛС, обнаруживаются как одна цель.Чем короче зондирующий импульс и острее диаграмма направленности антенной системы, тем меньше импульсный объем, а следовательно, выше разрешающая способность РЛС. РЛС с меньшим импульсным объемом более помехоустойчивы при воздействии пассивных помех.

Разрешающие способности при автосопровождении.
Под разрешающими способностями РЛС при автоматическом сопровождении целей понимают минимальные разности координат целей, при которых еще возможно уверенное автосопровождение каждой цели.
2. Передающая система
2.1 Длина волны. Частота
Диапазон волн, применяемый в радиолокационной технике, лежит в области метровых, дециметровых, сантиметровых и миллиметровых волн. От длины волны РЛС зависят размеры антенной системы при требуемых значениях диаграммы направленности и коэффициента направленного действия антенны. Применение более коротких волн при тех же размерах антенны позволяет улучшить разрешающую способность и точность отсчета угловых координат. При выборе длины волны необходимо учитывать поглощающие и рассеивающие действия гидрометеоров и атмосферы, возможность получения необходимой мощности от передатчика и обеспечения требуемой чувствительности приемника.
В диапазонах сантиметровых и особенно миллиметровых волн интенсивное поглощение электромагнитных колебаний вызывает нежелательное уменьшение дальности действия станции. Кроме того, гидрометеоры в этих диапазонах могут являться источником интенсивного отражения, затрудняющего и полностью исключающего наблюдение целей.
Выбор длины волны должен производиться с учетом особенностей РЛС и влияния длины волны на ее тактические характеристики.
Так, например, РЛС дальнего обнаружения, от которой не требуется очень высокой разрешающей способности и большой точности измерения угловых координат, может работать в диапазоне дециметровых или даже метровых волн.
Наоборот, для РЛС ближнего действия, как правило, важны высокая точность отсчета угловых координат и разрешающая способность. В таких случаях выгодно использовать сантиметровые, а иногда и миллиметровые волны, поскольку при общем небольшом радиусе действия станции затухание электромагнитных волн в атмосфере будет сказываться еще не слишком сильно.
Рабочая длина волны  =7,8см.
=7,8см.
При настройке PJIC обычно измеряется частота излучаемых колебаний  , которая находится с длиной волны в соотношении:
, которая находится с длиной волны в соотношении:

 где с – скорость света (
где с – скорость света ( ;
;
– частота излучаемых колебаний, [Гц];
– длина волны, [см]
Из этого следует, что частота излучаемых колебаний измеряется формулой

2.2 Мощность. Средняя мощность
Излучаемая мощность Ризлрадиолокационный станции практически всегда характеризуется импульсной мощностью передатчика Ри.
Эти мощности связаны между собой соотношением:

где  к.п.д. антенно-фидерного устройства.
к.п.д. антенно-фидерного устройства.
Под импульсной мощностью передатчика понимают среднюю в течению импульса мощность, отдаваемую передатчиком в фидерную систему.
Импульсная мощность связана со средней мощностью передатчика за период следования
импульса Рср соотношением:

где
τи - длительность импульса в сек.
Fu -частота следования импульсов в Гц.
Следовательно Рср,

Энергия передатчика:

2.3 Период повторения. Частота повторений
Для однозначного определения целей на заданных расстояниях максимальная частота повторения  зондирующих импульсов должна удовлетворять условию:
зондирующих импульсов должна удовлетворять условию:

К3- коэффициент запаса ( =1,15 1,25);
=1,15 1,25);
Fи =2862Гц;
с-скорость распространения радиоволн;
 максимальная дальность действия PJIC.
максимальная дальность действия PJIC.
Период повторения и частота находиться в обратной зависимости друг от друга.
 (38)
(38)
Частота повторения импульсов определяет число импульсов в пачке при заданной ширине диаграммы направленности антенны, а, следовательно, влияет на коэффициент  различимости приемно-индикаторного тракта, т.е. на наблюдаемость сигнала на экранах индикатора.
различимости приемно-индикаторного тракта, т.е. на наблюдаемость сигнала на экранах индикатора.
2.4 Длительность импульса
Основным соображением по выбору длительности импульса является обеспечение заданной разрешающей способности по дальности. От длительности импульса также зависит минимальная дальность действия Rmin. Уменьшение длительности импульсов приводит к уменьшению эффективной площади от распределенных объектов.
Длительность зондирующего импульса задана в условии и равна:  .
.
Скважность импульсов Q это отношение периода повторения Т к длительности импульса  .
.
Скважность:

Величина, безразмерная и не может быть менее единицы или равная ей.
2.5 Форма спектра и его ширина
Совокупность гармонических колебаний, сумма которых в любой момент времени равна мгновенному значению сигнала S(t), называют гармоническим спектром сигнала.
Распределение амплитуд гармонических составляющих по частоте называют амплитудным спектром сигнала, распределение начальных фаз по частоте - фазовым спектром.
Амплитудный спектр даёт возможность представления о распределении энергии сигнала в частотной области, что имеет существенное значение для выбора полосы пропускания приёмного устройства.
Спектр сигнала содержит три гармоники: центральную с частотой  и две боковые, смещённых относительно центральной влево и вправо на величину частоты модуляции
и две боковые, смещённых относительно центральной влево и вправо на величину частоты модуляции 
Практически определении формы спектра и определение параметров спектра осуществляется с помощью перестраиваемых узкополосных приемников - анализаторов спектра. Необходимым условием является обеспечение ширины полосы пропускания меньше половины частоты повторения сигнала.
Спектры периодических последовательностей прямоугольных видеоимпульсов имеют
дискретную структуру с периодом  .
.
Амплитуды гармоник с изменением частоты изменяются по закону функции  .
.
Амплитуды гармоник пропорциональны амплитуде сигнала, его дли
|
|
|
