 |


двигателя постоянного тока.
|
|
|
|
асинхронного двигателя.
Формулы для искусственных характеристик отличаются от естественных, тем что вместо активного сопротивления фазы ротора R2 используется полное сопротивление R2S линия фазы ротора. Все приведенные выше формулы для асинхронного двигателя являются универсальными и могут использоваться для построения как естественных электромеханических и механических характеристик так и искусственных.
Рассмотрим, как зависит от активного сопротивления линия ротора критического скольжения:
 - естественная;
- естественная;  - искусственная.
- искусственная.
 .
.
Из  , где aSk=const, Mk=const видно, что моменты будут одинаковы, когда существуют следующие соотношения скольжения.
, где aSk=const, Mk=const видно, что моменты будут одинаковы, когда существуют следующие соотношения скольжения.
 ;
;  .
.
Таким образом, при любых одинаковых моментах для искусственной и естественной характеристики асинхронного двигателя, скольжение на искусственной характеристики во столько раз больше, чем на естественной во сколько R’2S>R’2.
Для номинального момента:
 ;
;  .
.
На прямолинейном участке механической характеристики можно записать следующие соотношения:
 ;
;  , Se – текущее состояние.
, Se – текущее состояние.

 ;
;  ;
;  .
.
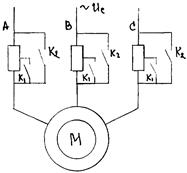
Механические характеристики синхронного двигателя.
Синхронный двигатель применяется для приводов механизмов, скорость которых не регулируется. Синхронный двигатель имеет достаточно высокий cosj, КПД, обладает повышенной надежностью, вследствии значительного воздушного зазора между статором и ротором двигателя. Синхронный двигатель чаще всего используется в установках с длительным режимом работы, особенно для приводов большой мощности. Двигатель применяется для привода компрессора и насосов, как двигатель-генератор, для приводов средней мощности бумажной и цементной промышленности и т.д.
|
|
|
В настоящее время в связи с развитием полупроводниковых технологий появился регулируемый электропривод на базе синхронного двигателя, где регулирование производится изменением частоты питающего напряжения.

На статоре вложена трехфазная обмотка, на роторе обмотка возбуждения и пусковая обмотка. При пуске обмотку возбуждения включают на разрядное сопротивление Rр. При достижении скорости 0,95w0 подается возбуждение и включается Rр. Двигатель втягивается в синхронизм. Rр=(5¸10)Rов.
Если взять Rр достаточно большим, то в обмотке возбуждения наблюдается большие перенапряжения, если взять - малым, то искажается пусковая характеристика синхронного двигателя. Пусковая характеристика от обмотки «беличья клетка» аналогична асинхронному двигателю.
Синхронный двигатель выполнен с пусковыми клетками двух типов, что позволяет получить различные характеристики необходимые для различных механизмов.

Для второй характеристики, вследствие повышения активного сопротивления «беличьей клетки», соответствует наибольший пусковой момент. Но ей соответствует большее скольжение при номинальном моменте, что затрудняет вхождение в синхронизм. Двигатель с такой пусковой характеристикой применяется для механизмов с большим пусковым моментом.
Первая характеристика используется для механизмов при вентиляторном моменте.

Устойчивость системы синхронного двигателя характеризуется угловой характеристикой или зависимостью момента от угла внутреннего сдвига фаз между вектором ЭДС и напряжением сети.

qн=(25¸30) эл. град. – номинальная L нагрузки.
Устойчивая область работы двигателя от 0 до p/2.
Векторная диаграмма:


Из DОВЕ и DОАЕ: ОЕ=Uccosj=Ecos(j-q).
Из DОАС и DАВС: АС=Ucsinq=IcXccos(j-q).
 ;
;  ;
;
 ;
;  - при 900.
- при 900.
 .
.
Анализ зависимостей момента от q показывает, что асинхронный двигатель менее чувствителен к снижению напряжения, чем синхронный двигатель.
|
|
|
Наибольшее значение момента, характеризующего перегрузочную способность синхронного двигателя, наблюдается при угле согласования q=p/2. При этом будет максимальный момент
 .
.
Вместе с тем важной характеристикой работы синхронного двигателя является величина угла рассогласования, который находится в пределах 300-250=qн. Этот угол характеризует двигательный режим работы двигателя по условиям нагрева.
Для повышения устойчивости работы синхронного двигателя при ударных нагрузках применяют автоматическое поддержание ЭДС двигателя за счет перевозбуждения двигателя.
Для неявнополюсной машины момент при синхронной скорости может возникнуть только при наличии тока в обмотке возбуждения при явнополюсной машине, момент возникает и без возбуждения синхронного двигателя. Здесь возникает реактивный момент, который старается так повернуть полюса машины, чтобы сохранить минимальным магнитное сопротивление по продольной оси.

Синхронный двигатель отличается от другой машины тем, что с его помощью можно регулировать потребление реактивной энергии. Это объясняется тем, что если принять активное сопротивление статора равным нулю, то ЭДС двигателя без нагрузки будет равна напряжению сети. Она определяется результирующим магнитным полем, намагничивающих сил статора и намагничивающих сил обмотки возбуждения, и, в этом случае когда ток возбуждения отсутствует, весь поток создается статором, синхронный двигатель потребляет реактивный ток и тот отстает от напряжения сети на 900. Если машину возбудить, то часть результирующих намагничивающих сил будет создана обмоткой возбуждения и тогда намагничивающий ток статора, а следовательно и потребляемая энергия из сети уменьшится. Дальнейшее увеличение возбуждения двигателя приведет к размагничиванию магнитной системы двигателя.
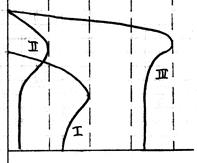
Перевозбуждение машины заставляет работать двигатель в емкостном квадранте, работать генератором реактивной энергии. Синхронный двигатель характеризуется U-образными характеристиками, это зависимость полного тока статора от тока возбуждения при различных нагрузках.


Кривая II – характеризует границу устойчивости статической работы двигателя.
|
|
|
Кривая I – регулировочная характеристика двигателя при cosj=1.
Кривая III – соответствует верхней границе возбуждения двигателя по условиям нагрева двигателя и самораскачивания.
Синхронный двигатель может работать в тех же тормозных режимах, что и асинхронный и другие двигатели, т.е. режим с рекуперацией энергии в сеть, режим динамического торможения и режим противовключения.

1)  2)
2) 
Торможение противовключением. В этом случае происходит изменение чередования фаз, обмотка возбуждения закорачивается на разрядное сопротивление.

Регулирование скорости электроприводов.
Для обеспечения рационального хода технологических процессов обеспечили наиболее эффективное использование производственных механизмов и оптимизировали режимы их работы, уменьшили потребление электрической энергии, применением регулирования скорости движения механизмов.
Для регулирования скорости движения рабочего органа существуют две возможности:
1. Изменение угловой скорости двигателя.
2. Изменение передаточного числа механических передач, установленных между двигателем и механизмом.
При регулировании скорости механическим способом отсутствует плавность регулирования, да и техническая реализация регулирования относительно сложна и не надежна. В настоящее время в подавляющем большинстве случаев регулирование скорости рабочего органа производится путем изменения скорости электродвигателей, работающих в регулируемом электроприводе.
Под регулированием скорости электродвигателя понимаем – целенаправленное ее изменение независимо от момента на валу двигателя в соответствии с требованиями, которые предъявляются к закону движения рабочего органа механизма. Иными словами это принудительное управление системой скорости, исходя их требований технологического процесса при подаче управляющего сигнала на вход системы.
Под регулируемым электроприводом понимаем – электропривод, обеспечивающий плавное с необходимой точностью регулирование координат скорости и момента в заданном диапазоне.
|
|
|
В естественной схеме включения двигатель не может обеспечить регулирования параметров движения. Поэтому для создания регулируемого электропривода необходим преобразователь электрической энергии. Регулируемые параметры преобразования энергии (напряжение, частота, форма тока, напряжения) удается получить для привода с заданными статическими и динамическими характеристиками. Применение регулируемого электропривода в составе технологических машин и агрегатах связано с одним из следующих обстоятельств:
1. Необходимо оперативное управление ходом технологического процесса (электроприводов кранов, прокатных станов).
2. Необходимо установить и точно выдерживать технологический режим (непрерывные прокатные станы, бумагоделательные машины).
3. Необходимость корректировки технологического процесса (питатели, дозаторы).
4. Автоматическое управление режимом обработки материала (станки с ЧПУ).
5. Необходимо оптимизировать технологический процесс по затратам электрической энергии (электропривода насосов, компрессоров, вентиляторов).
Способы изменения углов скорости двигателя следуют из анализа механических характеристик двигателя:
 - двигатель постоянного тока;
- двигатель постоянного тока;
 - двигатель переменного тока.
- двигатель переменного тока.
 .
.
Анализ этих формул показывает, что угловая скорость двигателя может изменяться, как изменением параметров силовой электрической цепи привода, числом пар полюсов цепи статора и т.д. и изменением магнитного потока, а также изменением параметров источника питания.
Регулирование скорости также возможно изменением момента сопротивления. Этот способ не применим, так как изменение момента вызывает отклонение регулируемой величины от заданного значения. Способы регулирования скорости электропривода связаные с изменением параметров электрических цепей двигателя называют параметрическим. Также различают непрерывный способ регулирования и импульсный способ регулирования. Под непрерывным способом регулирования понимают регулирование, когда регулируемые параметры или значения напряжения и частоты остаются постоянными для данного значения скорости. При импульсном регулировании регулируемые параметры цепи или источника питания периодически изменяются, отклоняясь от заданного значения.
Свойства регулирования электропривода оцениваются следующими показателями:
1. Диапазон регулирования скорости, под которым понимают отношение максимальной скорости к минимальной при заданном пределе изменения момента  .
.
Увеличение верхнего предела скорости ограниченно механической прочностью ротора или якоря двигателя, а для двигателя постоянного тока кроме этого верхний предел ограничивает коммутационную способность коллектора.
|
|
|
Нижний предел угловой скорости ограничивается необходимой точностью поддержания заданной скорости при возможности изменения момента статической нагрузки на валу двигателя.
Диапазон регулирования определяется отношением максимальной скорости к минимальной, которая определяется по среднему значению из заданного максимального и минимального его значений, т.е.
 .
.

 ;
;  ;
;  ;
;  ;
;  .
.
2. Вторым важным показателем регулирования скорости является точность регулирования.
Абсолютная статическая ошибка регулирования электропривода будет определятся как падение скорости
 .
.
Абсолютная ошибка одинакова для всех механических характеристик, т.е. постоянна во всем диапазоне регулирования. Относительная величина ошибки переменная, различна для всех механических характеристик. Она находится как отношение абсолютной ошибки к заданной скорости
 .
.
Нижний предел скорости wmin может ограничиваться заданной требуемой точностью и условие выполнения заданной точности:
 ;
;  .
.
3. Плавность регулирования, которая характеризуется разностью двух последовательных значений скорости, которые представляют из себя ступени регулирования и, чем меньше эта разность, тем плавнее осуществляется регулирование скорости. Часто плавность характеризуется коэффициентом плавности регулирования, под которым понимают отношения двух степеней скоростей
 .
.
Наиболее плавное регулирование имеет место при коэффициенте плавности стремящимуся к единице jw®1. Такой результат возможен при регулировании скорости изменением напряжения и изменением частоты асинхронного двигателя.
При параметрическом регулировании плавности изменения скорости зависит от мощности двигателя, так как изменение параметров в силовой цепи связано с коммутационной аппаратурой и, для этих приводов большой и средней мощности, ее число должно быть ограничено.
4. Экономичность регулирования, которая будет тем выше чем меньше, первоначальные затраты необходимые для установки оборудования и эксплуатационные затраты. Эксплуатационные затраты оцениваются косвенным способом по величинам КПД и коэффициенту мощности.
5. Направление, в котором регулируется скорость, т.е. увеличение или уменьшение ее по отношению к номинальной скорости напрямую зависит от способа регулирования. При реостатном регулировании у двигателей постоянного тока или асинхронного двигателя с фазным ротором, регулирование осуществляется вниз от основной.
6. Допустимая нагрузка двигателя определяется нагревом обмоток двигателя. Условием полного использования электродвигателя является равенство тока двигателя номинальному. При различных характеристиках зависимости момента сопротивления и мощности механизмов от скорости, необходимо применение таких методов регулирования, при которых эквивалентный момент двигателя по нагреву при изменении скорости будет меняться по такому же закону, как и статический момент. Например, двигатель постоянного тока, если статический момент во всем диапазоне рабочей скорости постоянен, то надо применить метод регулирования вниз от номинальной скорости – это реостатный способ регулирования.
Если регулирование идет при постоянной мощности механизма, то регулирование идет вверх от номинальной скорости – изменением током возбуждения двигателя.
Для определения допустимой мощности следует найти его величину соответствующую номинальному току главной цепи.
I – М=const; II – F-const.

Параметрическое регулирование скорости
двигателя постоянного тока.
 .
.
Реостатное регулирование.
Реостатный способ регулирования осуществляется путем изменения активного сопротивления резистора, включенного в цепь якоря двигателя. Переключение степеней резистора, в зависимости от мощности двигателя, производится или плоским контроллером или силовыми контакторами.
1 способ. Используется для двигателей малой мощности. Число степеней большое, коэффициент плавности больше единицы jw®1.
Для двигателей большой мощности используется 2 способ, он более дорогостоящий, поэтому число степеней небольшое и коэффициент плавности значительно отличается от единицы.
Для всех типов электродвигателей регулирование скорости осуществляется вниз от основной номинальной скорости. При этом жесткость механической характеристики уменьшается. При снижении скорости потери электрической энергии растут, допустимый момент нагрузки остается практически постоянным.
Механические характеристики для двигателя постоянного тока независимого возбуждения при реостатном регулировании производятся при постоянном потоке и линейны. Ф=const. Если принять за допустимый момент по нагреву номинальный ток I=Iн, Ф=Фн, Мдоп=КФнIян=Мн, т.е. момент не изменен от скорости, если принять что двигатель обдуваемый.
Достоинством реостатного регулирования является его простота, все искусственные механические характеристики лежат ниже естественных механических характеристик. Зависимость момента от вводимого в цепи якоря сопротивления линейно.
 .
.
1. weo(M) – скорость двигателя на естественной характеристике при заданном моменте.
2.  - падение скорости двигателя за счет введения дополнительного сопротивления в цепь якоря.
- падение скорости двигателя за счет введения дополнительного сопротивления в цепь якоря.

Анализ выражения w от введения сопротивления показывает, что при малых моментах регулирования скорости не эффективно.
Со снижением скорости при реостатном регулировании уменьшает жесткость механических характеристик, при реостатном регулировании также мал диапазон регулирования скорости.
 ;
;  .
.
Диапазон регулирования .
 ;
;
 ;
;  ;
;
 .
.
В практике часто вместо значения минимальной жесткости характеристики задают наибольшее отклонение момента статической нагрузки DМс=(0,5÷1)Мн.
 ;
;  .
.
 ;
;
Rя=0,04÷0,24; Д=2÷2,5; DМс*=0,5÷1.
КПД средний:
 ;
;  .
.
Для двигателей смешанного и последовательного возбуждения зависимость момента от ведения в цепи якоря дополнительного сопротивления, как и для двигателей постоянного тока с независимым возбуждением, имеет линейный характер
 .
.
Регулирование скорости двигателя постоянного тока независимого возбуждения изменением потока возбуждения.
Из выражения механической характеристики просматривается, что регулирование скорости возможно изменением магнитного потока двигателя. Поток следует изменять лишь в сторону уменьшения от номинального значения, так как по условиям нагрева, он не должен превышать длительностью его номинальное значение. Кроме этого у многих машин постоянного тока при изменении магнитного потока выше номинального наступает насыщение магнитной цепи машины, т.е. этот способ регулирования скорости производится ослаблением поля двигателя.
Основным достоинством этого способа регулирования является, то что регулирование скорости реализуется за счет изменения режима работы в цепи относительно малой мощности. Кроме этого достоинством способа являются малые потери равные потерям при работе двигателя на естественной характеристике. Регулирование тока возбуждения производится или введением сопротивления в цепь обмотки возбуждения или за счет подключения обмотки возбуждения к регулируемому источнику питания.
Допустимый момент на валу двигателя I=Iн; М=КФIн.
 ;
;  ;
;  ;
;
 .
.

При этом способе регулирования, из анализа механической характеристики, можно видеть  , что скорость идеального холостого хода
, что скорость идеального холостого хода  растет, ток короткого замыкания остается постоянным
растет, ток короткого замыкания остается постоянным  . Момент короткого замыкания Мкз=KФIкз меняется, жесткость
. Момент короткого замыкания Мкз=KФIкз меняется, жесткость  .
.
Скорости механической характеристики
 Ф1<Ф2<Ф3;
Ф1<Ф2<Ф3; 
Параметрическое регулирование скорости асинхронного двигателя.
 ;
;  .
.
Способы параметрического регулирования скорости асинхронного двигателя видны из анализа механической характеристики двигателя.
К параметрическим способам регулирования относятся:
- Способ изменения активного сопротивления в цепях статора и ротора.
- Реостатное регулирование изменением реактивного сопротивления в цепях ротора и статора.
- Изменение числа пар полюсов.
Критическое скольжение
 ;
; 
При введении сопротивления в цепь обмоток фаз ротора меняется критическое скольжение, а критический момент остается постоянным.
Если мы принимаем приведенный ток ротора I'2=const, то, как видно из выражения тока ротора, между скольжением и сопротивлением существует линейная зависимость
 ;
;  ; где
; где  - постоянно.
- постоянно.
 ;
;  - изменение сопротивления в цепи ротора.
- изменение сопротивления в цепи ротора.
Механические характеристики могут записаться следующим образом:
 ;
;  ;
;  ;
;
 ;
;  .
.
Отметим, что cosj асинхронного двигателя при реостатном регулировании скорости двигателя изменением сопротивления в цепи ротора и в случае постоянного момента не изменяется и это следует из следующего выражения
 .
.
Реостатное регулирование асинхронного двигателя изменением сопротивления в цепи статора.

 ;
; 
1R1S>2R1S
Из механической характеристики видно, что с увеличением дополнительного активного сопротивления статора уменьшается критический момент, максимальный момент, критическое скольжение и это приводит к сужению рабочего участка и к снижению жесткости.
 ;
;
Sне=0,02¸0,13

Регулирование скорости асинхронного двигателя.
Изменение числа пар полюсов.
Этот способ применяется для короткозамкнутых двигателей. Регулирование скорости ступенчатое. Принцип такого способа регулирования видно из применения скорости идеального холостого хода  .
.
Для изменения числа пар полюсов необходимо, чтобы в пазы статора были вложены независимые обмотки с разными значениями числа пар полюсов, либо при одной обмотке имелась бы возможность изменять ее схему соединения.
Изменение числа пар полюсов за счет нескольких независимых обмоток приводит к повышенным габаритам двигателя, но при этом возможно любое соотношение числа пар полюсов двигателя. Как правило, многоскоростной двигатель выполнен с двумя независимыми обмотками с отношением числа пар полюсов от 3:1 до 12:1.
Для двигателей с переключением числа пар полюсов и изменением схемы обмотки статора каждой фазы, обмотка состоит из двух частей, в одной из которых меняется направление тока путем переключения этих частей согласно последнему соединению на встречно-последовательное или встречно-параллельное соединение. Такое переключение приводит к уменьшению числа пар полюсов вдвое, но скорость возрастает в два раза.
w0II=w0III=2w0I

При допустимом токе секции равная номинальная мощность для всех соединений будет следующая:
1. PдопI=3U1I1нcosjI – последовательное согласное;
2. PдопII=3U1I1нcosjII – последовательное встречное;
3. PдопIII=3U12×I1нcosjIII – последовательное параллельное.
Допустимый момент
 ;
;  ;
;  .
.
Из полученного выражения видно, что с уменьшением числа пар полюсов с переходом с согласно-последовательного включения на встречно-последовательное включение, допустимая мощность остается постоянной, т.е. регулирование скорости производится при постоянной мощности. Тогда как при увеличении скорости перехода согласно- последовательного включения на параллельное включение, допустимый момент не изменяется, т.е. регулирование идет с постоянным моментом.

 ;
;
 ;
;
 .
.
 ;
;  .
.
Механические характеристики.

При параллельном соединении перегрузочная способность растет вдвое. Наибольшее практичное применение получили схемы переключения со звезды на двойную звезду и переключение с треугольника на двойную звезду.



Переключение с треугольника на двойную звезду. Характеристики аналогичны схеме переключения согласно-последовательного включения на параллельное, т.е. идет регулирование при постоянном моменте.
Допустимая мощность:
 ;
; 
Рдопll»РдопD,т.к. cosj треугольника за счет потребления реактивной энергии больше.
cosjll<cosjD за счет потребления реактивной энергии.
 ;
;  ;
;  .
.
 ;
;  ;
;
 ;
;  ;
;  .
.

Из всех параметрических способов регулирования скорости изменение числа пар полюсов наиболее прост для практической реализации, и наиболее экономичен, так как в нем значительно меньше максимальные потери скольжения.
Широтно-импульсное управление электроприводами.
Все выше рассмотренные способы параметрического регулирования скорости, задают определенную скорость при неизменном значении параметров.
При большом числе ступеней скорости требуется значительное число коммутаций аппаратуры, что ведет к увеличению стоимости оборудования, к уменьшению надежности. Для уменьшения коммутаций аппаратуры применяют импульсный способ регулирования определенных параметров схемы.



 ;
;
R=R0 – при замкнутом К;
R=R0+Rдоп – при разомкнутом К.
 ;
;
 ;
;
 ;
;
 .
.
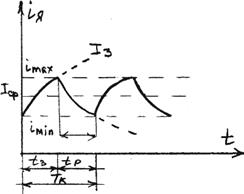
Импульсное изменение параметров, в данном случае Rя в цепи якоря двигателя, реализуется введением личного сопротивления Rд в цепь якоря (ключ К – разомкнут) или выведением сопротивления Rд (ключ К закорачивают).
Коммутацию ключа обычно осуществляют таким образом, что в период коммутации Тк=const, меняется лишь соотношение времени замкнутого состояния и разомкнутого состояния ключа.
Т.е. сопротивление меняется от R0 до R0+Rд.
Такой способ коммутации называют широтным и время замыкания ключа в относительных единицах  - называется скважностью.
- называется скважностью.
Другой способ, когда tз=const, а меняется период Тк называют частотным управлением.
При неизменном значении tз=const наступает tр=const (квазиустановившейся режим).
В этом случае при замыкании ключа ток растет от минимального до максимального Rядв=R0.

При размыкании ключа сопротивление в цепи якоря: RяS=R0+Rд.
 .
.
В квазиустойчивом режиме величины максимального, минимального, среднего тока постоянны, а значит и постоянна по величине средняя величина скорости. Для перехода к механической характеристике необходимо определить эквивалентное сопротивление якорной цепи.
 ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;
 .
.


Широтно-импульсный способ регулирования скорости применим для механизмов, работающих в повторно кратковременных режимах, так как управление осуществляется в цепях малой мощности, данный способ позволяет получить бесступенчатое плавное регулирование скорости. Широтно-импульсный способ позволяет повысить жесткость механической характеристики, если ввести обратную связь по скорости или напряжению.
Энергетические показатели этого способа регулируются несколько хуже, чем при реостатном регулировании.
Для двигателя постоянного тока увеличиваются потери за счет пульсации тока относительно его средней величины.
Для асинхронного двигателя, кроме увеличения потерь за счет пульсации выпрямительного тока, увеличиваются потери за счет искажения тока обмоток асинхронного двигателя при включении их в обмотки двигателя.
Регулирование скорости изменением питающего напряжения.
Понятие об электроприводе по системе УП-Д.
Регулирования скорости изменением напряжения возможно как в приводах постоянного тока, так и переменного.
Для реализации этого способа необходимо иметь источник напряжения. Напряжение на зажимах, которого изменяется в достаточно широких пределах. Т.е. необходим управляющий преобразователь электрической энергии. Наиболее широкое распространение получили электрический машинный преобразователи для приводов постоянного тока, для приводов постоянного и переменного тока – вентильный преобразователь.
Для асинхронного двигателя иногда применяется управляющая схема, где для регулирования напряжения применяют автотрансформаторы и трансформаторы с переменными коэффициентами напряжения.
Электрические машинные преобразователи постоянного тока представляют собой генератор постоянного тока, приводимый во вращение асинхронным двигателем или синхронным двигателем. Изменение напряжения на его зажимах производится за счет регулирования потока возбуждения машины. Регулирование напряжения производится изменением угла управления тиристоров или скважности в системе ШИР-Д.
Расчетная мощность преобразователей равна или несколько больше мощности двигателя. Для всех типов преобразователей соответствует одна и та же эквивалентная схема, где регулирование преобразователей представляется в виде ЭДС, величина которой постоянно меняется в процессе регулирования. В состав эквивалентной схемы входит сопротивление преобразователя, система соединения проводов и сопротивление якоря.

Механическая характеристика для двигателя в системе УП-Д имеет выражение аналогичное выражению механической характеристики в естественной схеме включения двигателя.
 ;
;  .
.

Жесткость искусственной механической характеристики
|
|
|
