 |


Двигатели для электропривода
|
|
|
|
Учитывая, что

 ,
,
где  – диаметр якоря;
– диаметр якоря;  – частота вращения якоря, об/мин;
– частота вращения якоря, об/мин;  – число полюсов, получаем:
– число полюсов, получаем:

и окончательно
 .
.
(1.1)
Таким образом, ЭДС обмотки якоря пропорциональна частоте вращения якоря и магнитному потоку главных полюсов машины.
Постоянная для данной машины величина  называется конструктивным коэффициентом ЭДС
называется конструктивным коэффициентом ЭДС
73. Уравнение электрического состояния генератора
U=E-RT
Уравнение электрического состояния двигателя пост тока
U=E+RT
Они отличаются только знаком, который определяем по цепи
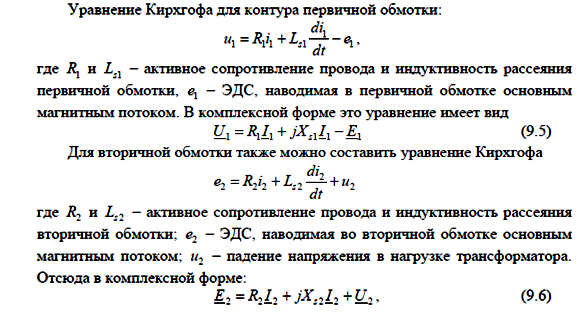
74. Когда машина работаете режиме холостого хода (х. х.), т. е. при отсутствии тока в обмотке якоря, единственным источником магнитного поля в машине является н. с. обмотки возбуждения, создающая основной поток Ф. При нагрузке электрической машины, когда возникает ток в цепи якоря, состоящей из нескольких обмоток (якоря, добавочных полюсов, последовательного возбуждения и компенсационной), кроме основного магнитного потока, существуют магнитные поля обмоток цепи якоря. Поэтому магнитный поток в воздушном зазоре и пространственное распределение магнитного поля при нагрузке машины будут определяться совместным действием н. с. полюсов и цепи якоря. Таким образом, магнитный поток, который существует в машине при работе ее под нагрузкой, следует рассматривать как результирующий поток, созданный результирующей н. с. Воздействие н. с. якоря на н. с. основных полюсов называют реакцией якоря. При анализе этого явления мы воспользуемся методом наложения, для этого отдельно строим распределение основного поля полюсов и поля якоря, а затем совмещаем их в результирующее магнитное поле машины. Этот метод дает правильные результаты в том случае, если при наложении параметры машины не изменяются. Таким параметром является степень насыщения магнитной цепи машины", которую будем -считать постоянной величиной. Для выведения выражения н.".с. якоря вводится понятие о линейной нагрузке. Для этого зубчатый якорь приводится к гладкому с расчетным воздушным зазором и с равномерно распределенным по окружности якоря слоем проводников. Линейной нагрузкой якоря называют число проводов, приходящееся на 1 см длины окружности якоря А=М1а1{пО), где - число всех проводников обмотки; /я - ток в проводнике обмотки якоря. А; D - диаметр якоря, см. Распределение основного потока в двухполюсной машине при х. х., показанное.на рис. 4.1, а, имеет симметричный характер как относительно осевой линии dd основных полюсов, так и относительно геометрической нейтрали, занимающих неизменное положение в пространстве. Распределение магнитной индукции в зазоре под полюсом представляет собой трапецеидальную кривую (рис. 4.1, б). При вращении якоря по часовой стрелке в его обмотке наводятся э. д. с. в направлениях, показанных на рис, 4.1, а крестами иточками, но.ток в обмотке якоря отсутствует, так как цепь разомкнута. На рис. 4.2, а показано распределение магнитного поля якоря. Машина не возбуждена и якорь неподвижен: /в=0 и п=0. Щетки поставим по линии геометрической нейтрали и подведем к ним ток от какого-нибудь постороннего источника постоянного тока в таком направлении, чтобы направления токов в ветвях обмотки совпадали с направлением э. д. с, изображенными на рис. 4.1, а. В этом случае магнитные линии поля якоря, направление которых определяем, руководствуясь направлением тока в проводниках.обмотки якоря по правилу буравчика, выходят из якоря слева и входят справа. Так как магнитные линии выходят из северного полюса и входят в южный, то
|
|
|
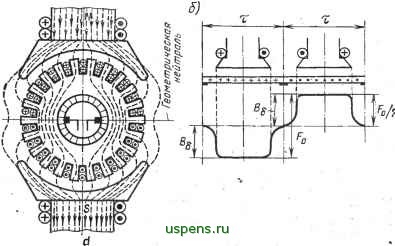
Рис 4.1. Основной магнитный поток машины при х. х. "(а) и кривая распределения н. с. и индукции под главными полюсами (б)
|
|
|
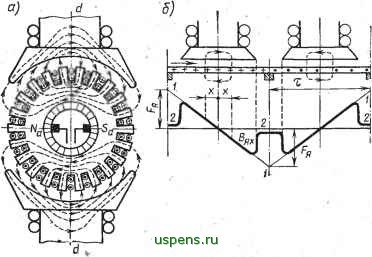
Рис. 4.2. Магнитное поле якоря (а) и кривая н. с. индукции поля
якоря (б)
левая сторона якоря обладает северной полярностью, а правая - южной. Такое поле якоря называется поперечным полем и определяется поперечной н. с. якоря Ряд. Как видно из рис. 4.2, б, якорь представляет собой электромагнит, ось которого совпадает с лини- ей щеток. Н. с. якоря по линии геометрической нейтрали имеет максимальное значение, так как соответствующая магнитная линия охватывает наибольший ток (кривая /), однако магнитная индукция от потока якоря в этих точках имеет небольшое значение (кривая 2), что объясняется увеличением магнитного сопротивления потоку якоря в межполюсном пространстве. График магнитной индукции поля якоря имеет седлообразный вид: индукция равна нулю под серединой полюсов и достигает наибольшего значения под краями полюсных наконечников.
75. Основные уравнения рабочего процесса:
- момент: M=n*p/9550
- Скорость двигателя: ω = (U — IR)/CΦ где U — подводимое к ОЯ напряжение, I — ток ОЯ, R — сопротивление цепи якоря, С — конструктивная постоянная, Ф — поток создаваемый обмоткой возбуждения.
- Крутящий момент, развиваемый двигателем с независимым (параллельным) возбуждением, пропорционален току в обмотке якоря (ротора) (для двигателей последовательного возбуждения — момент приближённо пропорционален квадрату тока, так как поток пропорционален почти току):
M = CMΦI
- ПротивоЭДС в обмотках якоря пропорциональна угловой частоте вращения ротора при постоянном потоке возбуждения:
 , где
, где  — коэффициент ЭДС двигателя,
— коэффициент ЭДС двигателя,  — угловая скорость вращения ротора.
— угловая скорость вращения ротора.
76. В начальный момент пуска в ход якорь двигателя неподвижен и противо-э. д. с. равна нулю (E = 0). При непосредственном включении двигателя в сеть в обмотке якоря будет протекать чрезмерно большой ток.

Поэтому непосредственное включение в сеть допускается только для двигателей очень малой мощности, у которых падение напряжения в якоре представляет относительно большую величину и броски тока не столь велики.
В машинах постоянного тока большой мощности падение напряжения в обмотке якоря при полной нагрузке составляет несколько процентов от номинального напряжения, т. е.
|
|
|

Следовательно, пусковой ток в случае включения двигателя в сеть с номинальным напряжением во много раз превышает номинальный (Iпуск)
Большой пусковой ток является опасным как для машины, так и для приемника механической энергии, находящегося на валу двигателя. При большом токе нагревается обмотка якоря машины и образуется интенсивное искрение под щетками, вследствие которого коллектор может выйти из строя. На валу двигателя создаются механические удары, так как при большом токе вращающий момент будет также большим.
Для ограничения пускового тока используют пусковые реостаты, включаемые последовательно с якорем двигателя при пуске в ход. Пусковые реостаты представляют собой проулочные сопротивления, рассчитываемые на кратковременный режим работы, и выполняются ступенчатыми, что дает возможность изменять ток в якоре двигателя в процессе пуска его в ход.
Схема двигателя параллельного возбуждения с пусковым реостатом показана на рис. 151. Пусковой реостат этого двигателя
имеет три зажима, обозначаемые буквами Л, Я, Ш. Зажим Л соединен с движком реостата и подключается к одному из полюсов рубильника (к линии). Зажим Я соединяется с сопротивлением реостата и подключается к зажиму якоря Я. Зажим Ш соединен с металлической шиной, помещенной на реостате (шунт). Движок реостата скользит по этой шине так, что между ними имеется непрерывный контакт. К зажиму Ш через регулировочное сопротивление rр присоединяется обмотка возбуждения Ш1. Зажим якоря Я2 и обмотки возбуждения Ш2 соединены между собой перемычкой и подключены ко второму полюсу рубильника, включающее двигатель в сеть.
При пуске в ход включается рубильник и движок реостата переводится на контакт 1, так что последовательно с якорем соединино полное сопротивление пускового реостата ПР, которое выбирается таким, чтобы наибольший ток при пуске в ход Iмакс не превышал номинальный ток более чем в 1,7—2,5 раза, т. е.
|
|
|

При включении двигателя в сеть по обмотке возбуждения также протекает ток, образующий магнитный поток. В результате взаимодействия тока в якоре с магнитным полем полюсов создается пусковой момент.
Если пусковой момент окажется больше тормозного момента а валу двигателя (Мпуск>Мт), то якорь машины придет во вращение. Под действием инерции скорость вращения не может претерпевать мгновенных изменений и число оборотов якоря будет постепенно увеличиваться.
При увеличении скорости вращения якоря увеличивается противо-э. д. с. и ток в якоре начнет уменьшаться, что вызывает уменьшение вращающего момента двигателя.
В рабочем режиме сопротивление пускового реостата должно быть полностью выведено, так как оно рассчитано на кратковременный режим работы и при длительном прохождении тока выйдет из строя.
Когда ток в якоре уменьшится до небольшого значения Iмин движок пускового реостата переводится на контакт 2. При этом сопротивление пускового реостата уменьшится на одну ступень, что вызовет увеличение тока. Сопротивления всех ступеней пускового реостата выбирают так, чтобы при переводе движка реостата с одного контакта на другой ток в якоре изменялся от Iмин до Iмакс.
Увеличение тока в якоре вызывает увеличение вращающего момента, вследствие чего скорость вращения вновь увеличивается. С увеличением скорости вращения якоря возрастает противо-э.д.с. что вызывает уменьшение тока в якоре. Когда ток в якоре достигает вновь небольшого значения, движок реостата переводится на контакт 3.
Таким образом, сопротивление пускового реостата постепенно (ступенями) уменьшается, пока оно полностью не будет выведено (движок реостата на контакте 5), и в рабочем режиме ток и скорость якоря принимают установившиеся значения, соответствующие тормозному моменту на валу двигателя.
Наименьший ток при пуске в ход зависит от режима работы двигателя. Если двигатель пускается при полной нагрузке, то Iмин=1,1 Iн. При пуске двигателя без нагрузки или при малых нагрузках этот ток может быть меньше номинального тока двигателя.
Число ступеней пускового реостата зависит от разности Iмакс — Iмин, причем чем меньше разность этих токов, тем больше число ступеней. Обычно пусковые реостаты имеют от 2 до 7 ступеней. При пуске двигателя в ход регулировочное сопротивление rр в цепи возбуждения должно быть полностью выведено, т. е. ток возбуждения должен быть наибольшим, что дает возможность уменьшить пусковой ток. Для пуска двигателя необходимо создать пусковой момент, больший тормозного момента на валу (Мпуск> Мт). Так как Мпуск=КФIп, то для уменьшения пускового тока надо увеличить магнитный поток, т. е. увеличить ток в обмотке возбуждения.
|
|
|
Металлическая шина пускового реостата имеет соединение с зажимом 1. Это необходимо для того, чтобы при отключении двигателя от сети не было разрыва цепи обмотки возбуждения, имеющей значительную индуктивность.
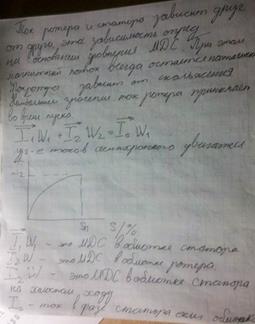
При отключении двигателя движок пускового реостата переводится на холостой контакт 0 и рубильник отключается. При этом обмотка возбуждения будет замкнута на сопротивление пускового реостата и якоря, что дает возможность избежать перенапряжений и дугообразования.
77. Принципы регулирования частоты вращения в двигательном режиме
1) реостатно-контакторное регулирование;
2) регулирование по системе «генератор — двигатель»;
3) регулирование по системе «управляемый выпрямитель — двигатель»;
4) импульсное регулирование.
Реостатно-контакторное регулирование.
Обычно при реостатно-контакторном управлении используются два метода регулирования: 1) при частотах вращения, меньших номинальной, в цепь якоря включают дополнительные сопротивления;
2) при повышенных торного регулирования частоты вра-частотах вращения регулируют с последовательным током возбуждения. Реостатно-контакторная система при двигателях с параллельным возбуждением позволяет в зоне высоких частот вращения осуществлять рекуперативное торможение путем увеличения тока возбуждения. В зоне низких частот вращения применяют реостатное торможение, причем регулирование тормозного усилия осуществляют с помощью той же реостатно-контакторной установки, которая регулирует двигательный режим, после соответствующего переключения схемы.
Регулирование по системе «генератор — двигатель». В этой установке двигатель Д получает питание от автономного генератора Г с независимым возбуждением, который приводится во вращение каким-либо первичным двигателем ПД (например, электродвигателем, дизелем) Регулирование частоты вращения осуществляют изменением:
1) напряжения на якоре двигателя путем изменения тока возбуждения генератора /вГ;
2) магнитного потока двигателя путем регулирования тока возбуждения двигателя /в.д.
Пуск в ход и получение низких частот вращения производят при максимальном токе возбуждения двига1еля, но при уменьшенном токе возбуждения генератора, т. е. при пониженном напряжении. Ослабление магнитного потока двигателя (уменьшение его тока возбуждения) производят только после того, как исчерпана возможность повышения напряжения, т. е. когда установлен максимальный ток возбуждения генератора. Изменение направления вращения двигателя производят переменой полярности подводимого к якорю напряжения, для чего меняют направление тока в обмотке возбуждения генератора.
Система «генератор — двигатель» выгодно отличается тем, что в ней отсутствуют силовые контакторы, реостаты и т. п. Управление легко поддается автоматизации, так как осуществляется путем регулирования сравнительно небольших токов возбуждения.
В рассматриваемой системе уменьшение частоты вращения производят с использованием рекуперативного торможения: сначала увеличивая ток возбуждения двигателя, а затем постепенно уменьшая ток возбуждения генератора, можно перевести двигатель в генераторный режим и быстро затормозить механизм. При этом накопленная кинетическая энергия якоря и механизма отдается в электрическую сеть.
Если нагрузка толчкообразная, то иногда на валу первичного двигателя, вращающего генератор, ставят маховик, который уменьшает перегрузки первичного двигателя.
Недостатки системы «генератор — двигатель» — большие масса, габариты, высокая стоимость установки; сравнительно низкий КПД (примерно 0,6...0,7), так как производится трехкратное преобразование энергии.
Регулирование по системе «управляемый выпрямитель — двигатель». Если требуется быстрая остановка механизма с последующим реверсированием, то для рекуперативного торможения параллельно с выпрямителем ставят инвертор, т. е. еще один полупроводниковый преобразователь, позволяющий отдавать энергию от машины постоянного тока в сеть переменного тока.
Недостаток системы «управляемый выпрямитель — двигатель» — низкий коэффициент мощности при пониженном выходном напряжении. Кроме того, из-за пульсаций напряжения возникают пульсации тока, что ухудшает работу двигателя: возрастают потери, ухудшается коммутация и т. д. (см. § 7.7). Особенно велики пульсации тока при питании от сети однофазного тока (в электровозах переменного тока), где обеспечение удовлетворительной коммутации — серьезная проблема.
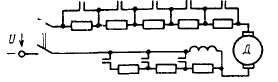
Импульсное регулирование частоты вращения.
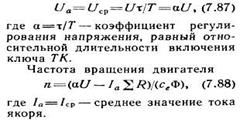
Импульсный преобразователь состоит из входного фильтра электронного ключа ТК (транзисторного или тири-сторного), обратного диода Д и индуктивности L. В период времени т, когда электронный ключ замкнут (транзистор или тиристор открыт), питающее напряжение U подается полностью на якорь двигателя, и его ток ia увеличивается (рис. 7.31, б); когда электронный ключ разомкнут (транзистор или тиристор заперт), ток iaпродолжает проходить через якорь двигателя и обратный диод Д под действием электромагнитной энергии, запасенной в индуктивностях (La + L) цепи якоря; при этом ток ia уменьшается. Частоты следования импульсов при номинальном режиме обычно составляет 200... 400 Гц, вследствие чего период Т примерно на два порядка меньше постоянной времени цепи якоря. Поэтому за время импульса т ток в двигателе не успевает значительно возрасти, а за время паузы (Т— —т) —уменьшиться.
Импульсное регулирование широко применяется при питании двигателей от сети постоянного тока, а также в автономных устройствах, где необходимо использовать аккумуляторы электрической энергии.
78. Электродвигатели постоянного тока в отличие от асинхронных и синхронных обладают свойством саморегулирования и по естественным механическим характеристикам полнее отвечают требованиям, предъявляемым к основному приводу буровых установок. Вследствие плавного изменения частоты вращения в зависимости от момента, создаваемого рабочей нагрузкой, повышаются производительность и экономичность буровой лебедки, насосов и ротора. В буровых установках двигатели постоянного тока получают питание от электромашинных и тиристорных преобразователей переменного тока, поступающего от промышленной электросети либо автономных дизель-электрических станций. свойством саморегулирования – это способность сохранять устойчивость работы двигателя при изменении на него нагрузки. Если нагрузка на вал двигателя увеличивается, это приводит к уменьшению частоты вращения, тогда из уравнения (1) получим, что ток якоря возрастет
 79. Реверс (изменение направления вращения) якоря двигателя можно осуществить изменив направление вращ. Момента М. Обычно, для реверса изменяют полярность напряжения на обмотке якоря т.е направление тока в обмотке якоря. Реверсирование асинхр. Двигателя можно произвести путем переключения между собой двух выводов.
79. Реверс (изменение направления вращения) якоря двигателя можно осуществить изменив направление вращ. Момента М. Обычно, для реверса изменяют полярность напряжения на обмотке якоря т.е направление тока в обмотке якоря. Реверсирование асинхр. Двигателя можно произвести путем переключения между собой двух выводов.
80. Скольжение – это относительное отставание ротора от магнитного поля статора представляет собой соотношение скорости поля статора относительно ротора. Во время остановки двигателя скольжение равно единице. При включении двигателя скольжение резко улучшается
 81.
81.
82. В электрическом двигателе при преобразовании одного вида энергии в другой часть энергии теряется в виде теплоты, рассеиваемой в различных частях двигателя. В электрических двигателях имеются потери энергии трех видов: потери в обмотках, потери в стали и механические потери. Кроме того, имеются незначительные добавочные потери.
Потери энергии в асинхронном двигателе рассмотрим при помощи его энергетической диаграммы (рис. 1). На диаграмме Р1 - мощность, подводимая к статору двигателя из сети. Основная часть Рэм этой мощности, за вычетом потерь в статоре, передается электромагнитным путем на ротор через зазор. Рэм называется электромагнитной мощностью.
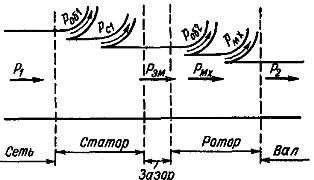
Рис. 1. Энергетическая диаграмма двигателя
Потери мощности в статоре складываются из потерь мощности в его обмотке Pоб1 = m1 х r1 х I12 и потерь в стали Pс1. Мощность Pс1 является потерями на вихревые токи и на перемагничивание сердечника статора.
Потери в стали имеются и в сердечнике ротора асинхронного двигателя, но они невелики и могут не приниматься во внимание. Это объясняется тем, что скорость вращения магнитного потока относительно статора n0 во много раз больше скорости вращения магнитного потока относительно ротора n0 - n, если скорость вращения ротора асинхронного двигателя n соответствует устойчивой части естественной механической характеристики.
Механическая мощность асинхронного двигателя Рмх, развиваемая на валу ротора, меньше электромагнитной мощности Рэм на значение мощности Pоб2 потерь в обмотке ротора:
Рмх = Рэм - Pоб2
Мощность на валу двигателя:
Р2 = Рмх - pмх,
где pмх - мощность механических потерь, равная сумме потерь на трение в подшипниках, на трение вращающихся частей о воздух (вентиляционные потери) и на трение щеток о кольца (для двигателей с фазным ротором).
Электромагнитная и механическая мощности равны:
Рэм = ω0M, Рмх = ωM,
где ω0 и ω - синхронная скорость и скорость вращения ротора двигателя; М - момент, развиваемый двигателем, т. е. момент, с которым вращающееся магнитное поле действует на ротор.
Из этих выражений следует, что мощность потерь в обмотке ротора:

или Pоб2 = s х Pэм
В случаях, когда известно активное сопротивление г2 фазы обмотки ротора, потери в этой обмотке могут быть найдены также из выражения Pоб2 = m2хr2х I22.
В асинхронных электродвигателях имеются также добавочные потери, обусловленные зубчатостью ротора и статора, вихревыми токами в различных конструктивных узлах двигателя и другими причинами. При полной нагрузке двигателя потери Pд принимаются равными 0,5% его номинальной мощности.
Коэффициент полезного действия (КПД) асинхронного двигателя:
η = P2 / P1 = (P1 - (Pоб - Pс - Pмх - Pд)) / P1,
где Роб =Pоб1 + Роб2 - суммарная мощность потерь в обмотках статора и ротора асинхронного двигателя.
Поскольку общие потери зависят от нагрузки, то и КПД асинхронного двигателя является функцией нагрузки.
На рис. 2, а дана кривая η = f(Р/Рном), где Р/Рном - относительная мощность.

Рис. 2. Рабочие характеристики асинхронного двигателя
Асинхронный электродвигатель конструируется так, чтобы максимум ее коэффициента полезного действия ηmax имел место при нагрузке, несколько меньшей номинальной. КПД двигателя достаточно высок и в широком диапазоне нагрузок (рис. 2, а). Для большинства современных асинхронных двигателей КПД имеет значение 80 - 90%, а для мощных двигателей 90-96%.
83,
 84.
84.
При пуске двигателя по возможности должны удовлетворяться основные требования: процесс пуска должен осуществляться без сложных пусковых устройств; пусковой момент должен быть достаточно большим, а пусковые токи - по возможности малыми. Иногда к этим требованиям добавляют и другие, обусловленные особенностями конкретных приводов, в которых используют двигатели: необходимость плавного пуска, максимального пускового момента и пр.
Практически используют следующие способы пуска: непосредственное подключение обмотки статора к сети (прямой пуск); понижение напряжения, подводимого к обмотке статора при пуске; подключение к обмотке ротора пускового реостата.
Рис. 5.27. Схема прямого пуска асинхронного двигателя (а)
и графики изменения моментов и тока (б)
Прямой пуск. Этот способ применяют для пуска асинхронных двигателей с короткозамкнутым ротором.Двигатели этого типа малой и средней мощности обычно проектируют так, чтобы при непосредственном подключении обмотки статора к сети возникающие пусковые токи не создавали чрезмерных электродинамических усилий и превышений температуры, опасных с точки зрения механической и термической прочности основных элементов машины.
В асинхронных двигателях отношение L/R сравнительно мало (особенно в малых двигателях), поэтому переходный процесс в момент включения характеризуется весьма быстрым затуханием свободного тока. Это позволяет пренебречь свободным током и учитывать только установившееся значение тока переходного процесса.
Двигатели обычно пускают с помощью электромагнитного выключателя К -магнитного пускателя (рис. 5.27, а) и разгоняют автоматически по естественной механической характеристике Μ (рис. 5.27, б) от точки П, соответствующей начальному моменту пуска, до точки Р, соответствующей условию М = М ст. Ускорение при разгоне определяется разностью абсцисс кривых Μ и М ст и моментом инерции ротора двигателя и механизма,который приводится во вращение. Если в начальный момент пуска М п <М ст, двигатель разогнаться не сможет.
Значение начального пускового момента можно получить из формулы (5.46, а), приняв s= 1:

Отношение моментов M п /M ном = k п.мназывают кратностью начального пускового момента. Для двигателей с короткозамкнутым ротором мощностью 0,6... 100 кВт ГОСТом установлено k п.м= 1,0...2,0; мощностью 100...1000 кВт- k п.м= 0,7...1,0.
Получение кратностей пускового момента, больших регламентированных ГОСТом, обычнонежелательно, так как это связано либо с увеличением активного сопротивления ротора [см. (5.58)], либо с изменением конструкции ротора (см. §5.11), что ухудшает энергетические показатели двигателя.
Недостатком данного способа пуска кроме сравнительно небольшого пускового момента является таксисе большой бросок пускового тока, в 5...7 раз превышающий номинальное значение тока.
Несмотря на указанные недостатки, пуск двигателя путем непосредственного подключения обмотки статора к сети широко применяют благодаря простоте и хорошим технико-экономическим свойствам двигателя с короткозамкнутым ротором - низкой стоимости и высоким энергетическим показателем (η, cosφ1, k ми др.).
|
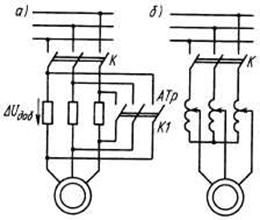
| Рис. 5.28. Схемы включения асинхронного двигателя при пуске с понижениемнапряжения |
Пуск при пониженном напряжении. Такой пуск применяют для асинхронных двигателей с короткозамкнутым ротором большой мощности, а также для двигателей средней мощности при недостаточно мощных электрических сетях. Понижение напряжения может осуществляться следующими путями:
а) переключением обмотки статора с помощью переключателя с нормальной схемы Δ на пусковую схему Υ. При этом напряжение, подаваемое на фазы обмотки статора, уменьшается в  раз, что обусловли-вает уменьшение фазных токов раз и линейных токов в 3 раза. По окончании процесса пуска и разгона двигателя до номинальной частоты вращения обмотку статора переключают обратно на нормальную схему;
раз, что обусловли-вает уменьшение фазных токов раз и линейных токов в 3 раза. По окончании процесса пуска и разгона двигателя до номинальной частоты вращения обмотку статора переключают обратно на нормальную схему;
б) включением в цепь обмотки статора на период пуска добавочных активных (резисторов) или реактивных (реакторов) сопротивлений (рис. 5.28, а). При этом на указанных сопротивлениях создаются некоторые падения напряжения ∆ U доб, пропорциональные пусковому току, вследствие чего к обмотке статора подается пониженное напряжение. По мере разгона двигателя снижается ЭДС E 2s, индуцированная в обмотке ротора, а следовательно, и пусковой ток. В результате уменьшается падение напряжения ∆ U доб на указанных сопротивлениях и автоматически возрастает

Рис. 5.29. Механические характеристики при включении обмотки
статора двигателя по схемам У и Δ (а) и графики изменения Μ и I 1
при пуске двигателя путем переключения обмотки статора со Υ на
Δ (б)
приложенное к двигателю напряжение. После окончания разгона добавочные резисторы или реакторы замыкаются накоротко контактором К1;
в) подключением двигателя к сети через понижающий автотрансфор-матор АТр (рис. 5.28,6), который может иметь несколько ступеней, переключаемых в процессе пуска соответствующей аппаратурой.
Недостатком указанных методов пуска путем понижения напряжения является значительное уменьшение пускового и максимального моментов двигателя, которые пропорциональны квадрату приложенного напряжения, поэтому их можно использовать при пуске двигателей без нагрузки или при незначительной нагрузке.
На рис. 5.29 для примера приведены механические характеристики двигателя при номинальном и пониженном напряжении, т. е. при соединении обмотки статора по схемам Υ и Δ, а также графики изменения тока I 1 и момента Μ при пуске двигателя путем переключения обмотки статора со Y на Δ. При соединении по схеме Υ максимальный и пусковой моменты уменьшаются в 3 раза, вследствие чего двигатель не в состоянии осуществить пуск механизма с нагрузочным моментом М н.
Пуск с помощью реостата в цепи ротора. Этот способ применяют для пуска двигателей с фазным ротором. Если в цепь ротора включить пусковой реостат R п, то активное сопротивление цепи ротора увеличится, вследствие чего точка К на круговой диаграмме (рис. 5.30, а) сместится ближе к точке О (точка К'). При этом максимальный
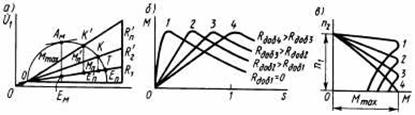
Рис. 5.30. Круговая диаграмма при включении реостата в цепь ротора
асинхронного двигателя и получаемые при этом механические характеристики
момент (отрезок  )не изменяется, а пусковой момент возрастает от значения М пдо значения М' п, так какувеличивается отрезок
)не изменяется, а пусковой момент возрастает от значения М пдо значения М' п, так какувеличивается отрезок  , пропорциональный этому моменту. Одновременно повышается критическое скольжение, а поэтому зависимость M=f(s) сдвигается в область больших скольжений, а зависимость n2 = f(M) - в область меньших частот вращения (рис. 5.30, б, в, кривые 1 - 4).
, пропорциональный этому моменту. Одновременно повышается критическое скольжение, а поэтому зависимость M=f(s) сдвигается в область больших скольжений, а зависимость n2 = f(M) - в область меньших частот вращения (рис. 5.30, б, в, кривые 1 - 4).
Для того чтобы пусковой момент был равен максимальному, необходимо так подобрать сопротивление пускового реостата R п, чтобы точка К' находилась вблизи точки А м. Это условие выполняется при R' п + R' 2 + R 1 ≈X 1 + Х' 2. Включение сопротивления R пуменьшает также и пусковой ток двигателя, так как в этом случае

Пусковой реостат имеет обычно три - шесть ступеней (рис. 5.31, а), что позволяет в процессе пуска постепенно уменьшать пусковое сопротивление, поддерживая высокое значение пускового момента двигателя. Сначала двигатель пускается по характеристике 4 (рис. 5.31,6), соответствующей сопротивлению пускового реостата R п3 = R доб1 + R доб2 + R доб3, и развивает вращающий момент М пmax. По мере увеличения частоты вращения вращающий момент Μ уменьшается и может стать меньше некоторого момента Mпmin. Поэтомупри M=M пminчасть пускового реостата R доб3 выводят, замыкая контактор КЗ. Вращающий момент при этом мгновенно возрастает до М пmax, а затем с увеличением частоты вращения изменяется по характеристике 3, соответствующей сопротивлению реостата R п2 = R доб1 + R доб2. При дальнейшем уменьшении момента Μ до M пmin часть реостата R доб2 снова выключается контактором К2, и двигатель переходит на работу по характеристике 2, соответствующей сопротивлению R п1= R доб1. Таким образом, при постепенном (ступенчатом) уменьшении сопротивления пускового реостата вращающий момент двигателя изменяется от М пmax до M пmin, а частота вращения
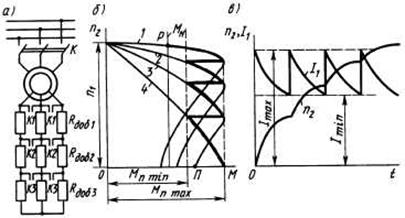
Рис. 5.31. Схема реостатного пуска асинхронного двигателя (а)
и диаграммы изменения момента, частоты вращения и тока
статора в процессе пуска (б, в)
возрастает по ломаной кривой, показанной на рис. 5.31, б жирной линией. В конце пуска пусковой реостат полностью выводят контактором К1, обмотка ротора замыкается накоротко, и двигатель переходит на работу по естественной характеристике 1. Выключение отдельных ступеней пускового реостата в процессе разгона двигателя может осуществляться вручную или автоматически. Таким образом, посредством реостата, включенного в цепь ротора, можно осуществить пуск двигателя при М п ≈Мтах и резко уменьшить пусковой ток.
На рис. 5.31, в показан характер изменения тока Д и частоты вращения п2 при пуске двигателя рассматриваемым способом. Ток также изменяется по ломаной кривой между двумя крайними значениями I max и I min.
Недостатком данного способа является его относительная сложность и необходимость применения более дорогих двигателей с фазным ротором. Кроме того, указанные двигатели имеют несколько худшие рабочие характеристики, чем двигатели с короткозамкнутым ротором такой же мощности (кривые η и cosφ1 проходят ниже). В связи с этим двигатели с фазным ротором применяют только при тяжелых условиях пуска, когда необходимо развивать максимально возможный пусковой момент.
85. Частота вращения асинхронного двигателя
n = n1 (1 – s) = (60f1/p) (1-s) (85)
Из этого выражения видно, что ее можно регулировать, изменяя частоту f1 питающего напряжения, число пар полюсов р и
 Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
скольжение s. Последнее при заданных значениях момента на валу Мвн и частоты f1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения частоты питающего напряжения. Этот способ требует наличия преобразователя частоты, к которому должен быть подключен асинхронный двигатель. На основе управляемых полупроводниковых вентилей (тиристоров) созданы статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечи
|
|
|
