 |


Поиск по деформируемому многограннику
|
|
|
|
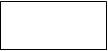
Впервые метод деформируемого многогранника был предложен Нелдером и Мидом. Они предложили метод поиска, оказавшийся весьма эффективным и легко осуществляемым на ЭВМ. Чтобы можно было оценить стратегию Нелдера и Мида, кратко опишем симплексный поиск Спендли, Хекста и Химсворта, разработанный в связи со статистическим планированием эксперимента. Вспомним, что регулярные многогранники в En являются симплексами. Например, как видно из рисунка 1, для случая двух переменных регулярный симплекс представляет собой равносторонний треугольник (три точки); в случае трёх переменных регулярный симплекс представляет собой тетраэдр (четыре точки) и т.д.

|

Рисунок 1.
Регулярные симплексы для случая двух (а) и трёх (б) независимых переменных.
обозначает наибольшее значение f(x). Стрелка указывает направление
наискорейшего улучшения.
При поиске минимума целевой функции f(x) пробные векторы x могут быть выбраны в точках En, находящихся в вершинах симплекса, как было первоначально предложено Спендли, Хекстом и Химсвортом. Из аналитической геометрии известно, что координаты вершин регулярного симплекса определяются следующей матрицей D, в которой столбцы представляют собой вершины, пронумерованные от 1 до (n+1), а строчки – координаты, i принимает значения от 1 до n:
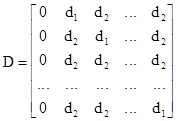 – матрица n X (n+1),
– матрица n X (n+1),
где
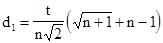 ,
,
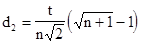 ,
,
t – расстояние между двумя вершинами. Например, для n=2 и t=1 треугольник, приведённый на рисунке 1, имеет следующие координаты:
| Вершина | x1,i | x2,i |
| 1 | 0 | 0 |
| 2 | 0.965 | 0.259 |
| 3 | 0.259 | 0.965 |
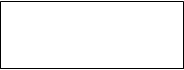
Целевая функция может быть вычислена в каждой из вершин симплекса; из вершины, где целевая функция максимальна (точка A на рисунке 1), проводится проектирующая прямая через центр тяжести симплекса. Затем точка A исключается и строится новый симплекс, называемый отражённым, из оставшихся прежних точек и одной новой точки B, расположенной на проектирующей прямой на надлежащем расстоянии от центра тяжести. Продолжение этой процедуры, в которой каждый раз вычёркивается вершина, где целевая функция максимальна, а также использование правил уменьшения размера симплекса и предотвращения циклического движения в окрестности экстремума позволяют осуществить поиск, не использующий производные и в котором величина шага на любом этапе k фиксирована, а направление поиска можно изменять. На рисунке 2 приведены последовательные симплексы, построенные в двумерном пространстве с «хорошей» целевой функцией.
|
|
|

Рисунок 2.
Последовательность регулярных симплексов, полученных при минимизации f(x).
----- проекция
Определённые практические трудности, встречающиеся при использовании регулярных симплексов, а именно отсутствие ускорения поиска и трудности при проведении поиска на искривлённых «оврагах» и «хребтах», привели к необходимости некоторых улучшений методов. Далее будет изложен метод Нелдера и Мида, в котором симплекс может изменять свою форму и таким образом уже не будет оставаться симплексом. Именно поэтому здесь использовано более подходящее название «деформируемый многогранник».
В методе Нелдера и Мида минимизируется функция n независимых переменных с использованием n+1 вершин деформируемого многогранника в En. Каждая вершина может быть идентифицирована вектором x. Вершина (точка) в En, в которой значение f(x) максимально, проектируется через центр тяжести (центроид) оставшихся вершин. Улучшенные (более низкие) значения целевой функции находятся последовательной заменой точки с максимальным значением f(x) на более «хорошие точки», пока не будет найден минимум f(x).
|
|
|
Более подробно этот алгоритм может быть описан следующим образом.
Пусть  , является i-й вершиной (точкой) в En на k-м этапе поиска, k=0, 1, …, и пусть значение целевой функции в x(k)i равно f(x(k)i). Кроме того, отметим те векторы x многогранника, которые дают максимальное и минимальное значения f(x).
, является i-й вершиной (точкой) в En на k-м этапе поиска, k=0, 1, …, и пусть значение целевой функции в x(k)i равно f(x(k)i). Кроме того, отметим те векторы x многогранника, которые дают максимальное и минимальное значения f(x).
Определим


 Поскольку многогранник в En состоит из (n+1) вершин x1, …,xn+1, пусть xn+2 будет центром тяжести всех вершин, исключая xh.
Поскольку многогранник в En состоит из (n+1) вершин x1, …,xn+1, пусть xn+2 будет центром тяжести всех вершин, исключая xh.
Тогда координаты этого центра определяются формулой
 (1)
(1)
где индекс j обозначает координатное направление.
Начальный многогранник обычно выбирается в виде регулярного симплекса (но это не обязательно) с точкой 1 в качестве начала координат; можно начало координат поместить в центр тяжести. Процедура отыскания вершины в En, в которой f(x) имеет лучшее значение, состоит из следующих операций:
1. Отражение – проектирование x(k)h через центр тяжести в соответствии с соотношением
 (2)
(2)
где a>0 является коэффициентом отражения;  – центр тяжести, вычисляемый по формуле (1);
– центр тяжести, вычисляемый по формуле (1);  – вершина, в которой функция f(x) принимает наибольшее из n+1 значений на k-м этапе.
– вершина, в которой функция f(x) принимает наибольшее из n+1 значений на k-м этапе.
2. Растяжение. Эта операция заключается в следующем: если  , то вектор
, то вектор  растягивается в соответствии с соотношением
растягивается в соответствии с соотношением
 (3)
(3)
где g>1 представляет собой коэффициент растяжения. Если  , то
, то  заменяется на
заменяется на  и процедура продолжается снова с операции 1 при k=k+1. В противном случае
и процедура продолжается снова с операции 1 при k=k+1. В противном случае  заменяется на
заменяется на  и также осуществляется переход к операции 1 при k=k+1.
и также осуществляется переход к операции 1 при k=k+1.
3. Сжатие. Если  для всех i¹h, то вектор
для всех i¹h, то вектор  сжимается в соответствии с формулой
сжимается в соответствии с формулой
 (4)
(4)
где 0<b<1 представляет собой коэффициент сжатия. Затем заменяем на  и возвращаемся к операции 1 для продолжения поиска на (k+1)-м шаге.
и возвращаемся к операции 1 для продолжения поиска на (k+1)-м шаге.
4. Редукция. Если  , все векторы
, все векторы  уменьшаются в 2 раза с отсчётом от
уменьшаются в 2 раза с отсчётом от  в соответствии с формулой
в соответствии с формулой
 (5)
(5)
Затем возвращаемся к операции 1 для продолжения поиска на (k+1)-м шаге.
|
|
|
Критерий окончания поиска, использованный Нелдером и Мидом, состоял в проверке условия
 (6)
(6)
где e – произвольное малое число, а  – значение целевой функции в центре тяжести .
– значение целевой функции в центре тяжести .
На схеме 1 приведена блок-схема поиска методом деформируемого многогранника, а на рисунке 3 показана последовательность поиска для функции Розенброка, начиная их x(0)=[-1,2 1,0]T. Деформируемый многогранник в противоположность жёсткому симплексу адаптируется к топографии целевой функции, вытягиваясь вдоль длинных наклонных плоскостей, изменяя направление в изогнутых впадинах и сжимаясь в окрестности минимума.
 Пуск
Пуск
 |
 Вычислить начальные значения
Вычислить начальные значения
xi(0), i = 1, 2, …, n+1, и f(x(0))
начального симплекса
 |

 Вычислить xh и xl и c
Вычислить xh и xl и c
 |
Отражение: вычислить
xn+3 = xn+2 + a(xn+2 - xn)
 |
Вычислить
f(xn+3)
 | |||
 |
|
 неравенство
неравенство
f(xn+3) < f(xh)?
 | |||
| |||
 Растяжение: вычислить
Растяжение: вычислить
xn+4 = xn+2 + g(xn+3 - xn+2)
 |
Вычислить f(xn+4)
 |

 Выполняется ли
Выполняется ли
неравенство
f(xn+4) < f(xl)?
 |
 Заменить
Заменить
xh на xn+4
 | |||||||
| |||||||
 | |||||||
 | |||||||
Выполняется ли
неравенство f(xn+3) < f(xi)
для всех i ¹ h?
 | ||||||||||
| ||||||||||
 | ||||||||||
| ||||||||||
| ||||||||||
| ||||||||||
 Заменить
Заменить
xh на xn+3
| ||||
 | ||||


|
|
|
