 |


Блок параллельного интерфейса / таймера
|
|
|
|
Задание
микропроцессор память блок шина
1. Разработать микропроцессорную систему на базе процессора MC68000.
2. Разработать и нарисовать структурную и принципиальную схему МПС. Произвести подключение шины адреса, данных и управления к соответствующим блокам на схеме. Сформировать блок устройства памяти (ОЗУ и ПЗУ) и подключить его к шинам блока центрального процессора на принципиальной схеме. ОЗУ должно обеспечивать выбор байта, слова и двойного слова.
3. Количество ОЗУ, ПЗУ, таймеров, параллельных и последовательных интерфейсов выбирается согласно варианту из таблицы.
Исходные данные
| ОЗУ, Кб | ПЗУ, Кб | Последовательные каналы (ввод/ вывод) | Параллельные каналы (ввод/ вывод) | Таймеры |
| 110 | 165 | 4 | 6 | 3 |
Разработка структурной схемы МПС
Для построения структурной схемы МПС необходимо рассчитать количество микросхем ОЗУ, ПЗУ, а также периферийных микросхем: DUART (Dual Asynchronous Receiver/Transmitter - двойной асинхронный приёмопередатчик) и PI/T - программируемый параллельный интерфейс-таймер.
Так как объем ОЗУ равен 110 Кб, а ПЗУ - 165 Кб, то необходимо использовать два слоя для ОЗУ и три слоя для ПЗУ. Каждый слой состоит из 4-х микросхем памяти ёмкостью 64Кх8 бит каждая, что позволяет производить обработку операндов различной размерности - байт, слово и длинное слово.
Для обеспечения заданного исходными данными 4 последовательных каналов передачи и 4 каналов приема необходимо 2 микросхемы DUART (по два канала передачи и приема в каждой).
Для обеспечения заданного исходными данными 6 параллельных каналов ввода и 6 параллельных каналов вывода необходимо 6 микросхем PI/T, т.к. для передачи или приема могут используются порты А и В, а порт С может использоваться для управления таймером и прерываниями.
|
|
|
Выбор необходимых слоев ОЗУ, ПЗУ, микросхем последовательного или параллельного интерфейсов, а также микросхем таймеров, производится с помощью дешифраторов.
Структурная схема МПС MC68000 состоит из элементов:
– CPU - микропроцессор MC68000;
– ГТИ - генератор тактовых импульсов;
– RAM - Оперативное запоминающее устройство (ОЗУ);
– ROM - Постоянное запоминающее устройство (ПЗУ);
– DUART - двойной асинхронный приемопередатчик;
– PI/T - программируемый параллельный интерфейс-таймер.
– FPGA - программируемая логическая схема.
Структурная схема любого МП комплекта сводится к отображению функционально законченных узлов в виде прямоугольников и отображению их соединений между собой только основными сигналами.
Разработка принципиальной схемы МПС
Блок микропроцессора
В качестве центрального процессора в данной курсовой работе используется процессор фирмы Motorola MC68000. Он имеет 16 - разрядную шину данных и 24-разрядную шину адреса. На рис. 2.1 приведена схема подключения микропроцессора к шинам проектируемой МПС.
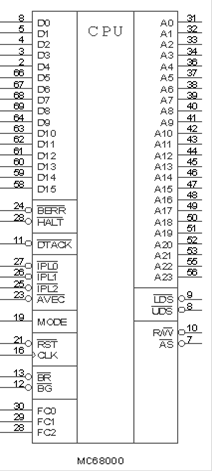
Рис. 2.1 - Схема микропроцессора
Системные сигналы. CLK - тактовый сигнал синхронизации, период которого определяет продолжительность такта машинного цикла. CLK согласовывает во времени функционирование узлов и блоков МП и сопровождает обмен в МПС.
Внешний сигнал системного сброса  = 0 вызовет системное прерывание выполнения текущей программы, а содержимое регистров адреса и данных обнуляется. В регистре признаков SR устанавливается значения флажка S = 1 (режим супервизора), а другие флажки приобретают значение 0. Внешний сигнал обычно формируется во время включения питания или при нажатия клавиши сброса. Сигнал = 0 формируется также при выполнении привилегированной команды RESET, которая переводит к начальному состоянию другие устройства МПС. Входной сигнал
= 0 вызовет системное прерывание выполнения текущей программы, а содержимое регистров адреса и данных обнуляется. В регистре признаков SR устанавливается значения флажка S = 1 (режим супервизора), а другие флажки приобретают значение 0. Внешний сигнал обычно формируется во время включения питания или при нажатия клавиши сброса. Сигнал = 0 формируется также при выполнении привилегированной команды RESET, которая переводит к начальному состоянию другие устройства МПС. Входной сигнал  = 0 останавливает выполнение текущей программы, переводит выводы А23…А1, D15…D0 в высокоимпедансное состояние (третье состояние), а выходы управляющих сигналов - к неактивному состоянию. С аналогичной реакцией МП формирует исходный сигнал =0 при двойной ошибки шины (двукратное поступление сигнала
= 0 останавливает выполнение текущей программы, переводит выводы А23…А1, D15…D0 в высокоимпедансное состояние (третье состояние), а выходы управляющих сигналов - к неактивному состоянию. С аналогичной реакцией МП формирует исходный сигнал =0 при двойной ошибки шины (двукратное поступление сигнала  = 0), выход из состояния остановки происходит при поступлении внешнего сигнала = 0 или прерывания. Сигнал ошибки обращения к шине = 0 формируется контролером шины.
= 0), выход из состояния остановки происходит при поступлении внешнего сигнала = 0 или прерывания. Сигнал ошибки обращения к шине = 0 формируется контролером шины.
|
|
|
Сигналы управления обменом.  - адресный строб, который своим активным уровнем = 0 в тактах S0 и S1 в цикле обмена сопровождает адрес на ША.
- адресный строб, который своим активным уровнем = 0 в тактах S0 и S1 в цикле обмена сопровождает адрес на ША.  - сигнал, который определяет направление обмена по ШД: ввод в МП (чтение) - при = 1; вывод из МП (запись), если = 0.
- сигнал, который определяет направление обмена по ШД: ввод в МП (чтение) - при = 1; вывод из МП (запись), если = 0.  (передача старшего байта),
(передача старшего байта),  (передача младшего байта) - сигналы, которые определяют размер данных на ШД. = 0,
(передача младшего байта) - сигналы, которые определяют размер данных на ШД. = 0,  = 0 определяют передачу слова. Младший байт передается, если = 1 и = 0, старший - = 0, = 1. Входной сигнал готовности к обмену
= 0 определяют передачу слова. Младший байт передается, если = 1 и = 0, старший - = 0, = 1. Входной сигнал готовности к обмену  = 0 поступает, если периферийное устройство или память - объекты обращения - готовы к обмену. Иначе -
= 0 поступает, если периферийное устройство или память - объекты обращения - готовы к обмену. Иначе -  = 1.
= 1.
Сигналы управления захватом шины. Эти сигналы определяют порядок использования системной шины устройствами системы. В режиме захвата шины МП отсоединяется от шины, а управление обменом осуществляет другое устройство. Чаще всего - это режим прямого доступа к памяти (ПДП), когда осуществляется обмен между основной памятью (ОП) и каким-нибудь внешним устройством без участия МП.  - входной сигнал запроса от внешнего устройства на захватывание шины. Если = 0, МП завершает текущий цикл обмена, приостанавливает выполнения команды и переводит выводы А23…А1, D15…D0 в высокоимпедансное состояние, а выходы управляющих сигналов - к неактивному состоянию.
- входной сигнал запроса от внешнего устройства на захватывание шины. Если = 0, МП завершает текущий цикл обмена, приостанавливает выполнения команды и переводит выводы А23…А1, D15…D0 в высокоимпедансное состояние, а выходы управляющих сигналов - к неактивному состоянию.  - исходный сигнал разрешения захватывания шины, который приобретает значение
- исходный сигнал разрешения захватывания шины, который приобретает значение  = 0 после разъединения МП с шиной.
= 0 после разъединения МП с шиной.  - входной сигнал подтверждения захватывания шины. После получения = 0 устройство, которое требовало разрешения на захватывание шины, присылает к МП сигналы
- входной сигнал подтверждения захватывания шины. После получения = 0 устройство, которое требовало разрешения на захватывание шины, присылает к МП сигналы  = 0, отменяет запрос на захватывание ( = 1) и переходит к управлению шиной. После завершения обмена указанное устройство присылает сигнал = 1. Затем МП переходит к выполнению прерванной команды.
= 0, отменяет запрос на захватывание ( = 1) и переходит к управлению шиной. После завершения обмена указанное устройство присылает сигнал = 1. Затем МП переходит к выполнению прерванной команды.
|
|
|
Сигналы FC2…FC0. Трехразрядный код FC2…FC0 определяет тип выполняемого цикла. Соответствующие комбинации битов указанного кода используются для распределения банков данных между супервизором и пользователем, формирования сигнала подтверждения прерывания  .
.
Поскольку выводы шины данных процессора обладают низкой нагрузочной способностью, то при большом количестве периферийных внешних устройств возможны сбои в работе процессора и возможен перегрев с последующим выходом из строя. Для исключения этой ситуации шину необходимо буферизировать (усиливать). В качестве буферных устройств можно использовать микросхемы 74F245. На рисунке 2.2 приведена схема буферизации шины данных.

Рисунок 2.2 - Схема буферизации шины данных
Блок памяти
В качестве микросхемы для ОЗУ в курсовой работе используется микросхема статического ОЗУ AMC21С512. Она представляет собой маломощное запоминающее устройство емкостью 64Кх8, выполненное по CMOS технологии и полностью совместима с уровнями ТТЛ. Принципиальное обозначение показано на рис. 2.3. Она имеет вход выборки микросхемы СЕ и вход разрешения выдачи данных ОЕ. Также имеется вход запись / чтение R/W. Работу микросхемы поясняет таблица 2.1.

Рисунок 2.3 - Банк ОЗУ на микросхеме AMC21С512
Таблица 2.1 - Таблица работы микросхемы ОЗУ AMC21С512
| Режим | R/W | СЕ | ОE | Операция ввода / вывода |
| Не выбрана | X | 1 | X | Высокоимпедансное состояние |
| Запрет выхода | X | 0 | 1 | Высокоимпедансное состояние |
| Чтение | 1 | 0 | 0 | Считывание |
| Запись | 0 | 0 | X | Запись |
X - любой сигнал (0 или 1)
В качестве микросхемы для ПЗУ в курсовой работе используется микросхема AMC27C512. Она представляет собой маломощное запоминающее устройство емкостью 64Кх8 и полностью совместима с уровнями ТТЛ. Условное графическое обозначение показано на рис. 2.4. Она имеет вход выборки микросхемы CS и один вход разрешения выдачи данных ОЕ. Работу микросхемы поясняет таблица 2.2.
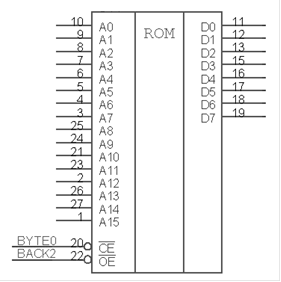
Рисунок 2.4 - Блок ПЗУ AMC27C512
Таблица 2.2 - Таблица работы микросхемы ПЗУ AMC27C512
|
|
|
| Режим | СЕ | ОЕ | D0-D7 |
| Не выбрана | 1 | X | Высокоимпедансное состояние |
| Запрет выхода | 0 | 1 | Высокоимпедансное состояние |
| Чтение | 0 | 0 | Считывание |
Поскольку шина данных микропроцессора 16-ти разрядная, то запись длинного слова производится за два цикла шины. Выбор нужного числа разрядов осуществляется соответствующей обработкой сигналов UDS# и LDS#. Управляющий сигнал R/W подаётся на блок ОЗУ, и определяет производится запись или чтение.
Блок параллельного интерфейса / таймера
Согласно исходным данным к разработанной микропроцессорной системе необходимо подключить периферийные устройства - последовательные порты ввода-вывода (DUART) и параллельные порты ввода-вывода (PI). Для этого используются имеющиеся в микропроцессорном комплекте микросхемы сдвоенного универсального асинхронного последовательного приёмопередатчика МС68681 и параллельный интерфейс / таймер МС68230. Микросхема МС 68230 включает в себя:
– 3 многофункциональных восьмиразрядных порта;
– многофункциональный 24-разрядный таймер с возможностью использования пяти разрядного предделителя;
– устройство управления режимами работы;
– логику прямого доступа к памяти;
– логику управления прерываниями.
Функциональное обозначение МС68230 представлено на рис. 2.5, назначение выводов в табл. 2.3.
Таблица 2.3 - Назначение выводов микросхемы МС 68230
| Наименование вывода | Функциональное назначение вывода | Примечание |
| D7 - D0 | Шина данных. | - |
| DTACK | Подтверждение передачи данных. | - |
| R/W | Чтение / Запись. | - |
| CS | Выбор микросхемы. | - |
| RESET | Сброс. | - |
| RS5-RS1 | Выбор внутреннего регистра, порта или команды | - |
| CLK | Тактовая частота микросхемы | - |
| H4-H1 | Линии квитирования | Могут быть использованы как линии ввода / вывода (H1 и Н3 - только ввод) или импульсные входы запросов на обслуживание внешних прерываний |
| PA7 - РА0 | Порт А | - |
| РВ7 - РВ0 | Порт В | - |
| РС7 - РС0 | Порт С | Линии РС7 + РС2 имеют альтернативные функции. |
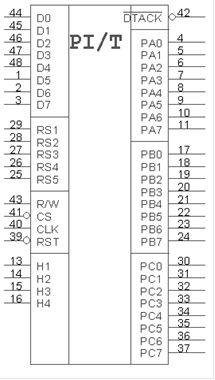
Рисунок 2.5 - Функционально-принципиальная схема PI/T
Структура микросхемы PI/T типа МС68230 включает блоки, обеспечивающие связь с микропроцессором и блоки, обслуживающие внешние устройства. Выводы РС7-2 порта С могут программироваться для передачи сигналов таймера, прерывания, запроса прямого доступа.
Связь PI/T с микропроцессором MC68000 реализуется путём обмена данными по линиям D7-0 в цикле чтения или записи. При этом от микропроцессора поступает соответствующий сигнал R/W#, a PI/T выдаёт сигнал подтверждения готовности DTACK#. Данные считываются или записываются в один из регистров таймера, порта А, В, С или блока управления обменом. Выбор регистра определяется адресным кодом, поступающим на входы RS5-1. Все регистры, кроме CNT, СРТ, имеют 8 разрядов, поэтому адресуются как байт. Регистры таймера CNT, СРТ, имеющие 24 разряда, адресуются как три отдельные 8-ми разрядные регистры. В адресном пространстве PI/T занимает 32 байтовых ячейки, из которых 23 ячейки заняты регистрами, остальные остаются неиспользуемыми. При обращении к PI/T на входы RS5-1 поступают соответствующие разряды формируемого микропроцессором адреса. На вход CLK поступают тактовые сигналы от генератора тактовых импульсов. На вход RESET# подаётся общий для всей системы сигнал сброса.
|
|
|
Программирование портов А, В, С и таймера на выполнение различных режимов обслуживания внешних устройств производится путём записи управляющих кодов в регистры управления соответствующих блоков PI/T.
Порты А и В обеспечивают параллельный обмен данными между микропроцессором и внешними устройствами.
Таймер реализован на базе 24-х разрядного вычитающего счётчика (CNT), начальное состояние которого устанавливается при инициализации, путём записи содержимого в регистр предварительной установки CPR. Запуск таймера происходит при записи в регистр управления TCR соответствующего управляющего кода, который определяет также режим его функционирования. При этом уменьшение содержимого CNT может производиться при поступлении тактовых импульсов CLK или внешних сигналов на вход TIN#. В режиме генерации (счёт импульсов CLK) таймер через интервалы времени, определяемые содержимым CPR, формирует сигналы на выходе TOUT#. В режиме счёта событий текущее содержимое CNT указывает число поступивших сигналов. Можно запрограммировать деление частоты считаемых импульсов на 32. При работе таймера на выходе TOUT# формируются прямоугольные импульсы, которые могут служить для управления внешними устройствами (периодическое включение-выключение, синхронизация и т.п.). Сигнал TOUT# может подаваться также на вход приоритетного шифратора в качестве запроса прерывания для микропроцессора. При этом сигнал подтверждения прерывания должен поступать на вход ТIАСК#. Для считывания вектора прерывания микропроцессор должен обратиться к регистру TIVR, в который значение этого вектора вводится в процессе инициализации таймера. Таким образом, использование таймера позволяет запускать требуемую программу в заданные моменты.
|
|
|
