 |


Измерительные преобразователи и схемы дистанционной передачи показаний
|
|
|
|
Измерительные преобразователи подразделяются на первичные, промежуточные и передающие. Первичные преобразователи являются начальным структурным элементом в измерительной цепи, непосредственно реагирующим на измеряемую физическую величину, поэтому их устройство зависит от особенностей измеряемой величины. Принцип действия и конструкции первичных преобразователей рассмотрены в разделах учебника, посвященных измерениям конкретных параметров (давления, температуры, состава и т.д.). Устройство промежуточных и передающих преобразователей ж связано непосредственно с видом контролируемой физической величины. Одни и те же преобразователи используют при измерении различных параметров. Основными промежуточными и передающими преобразователями являются реостатные (потенциометрические), индуктивные, индукционные, токовые, частотные, пневматические.

а – стержневые; б – кольцевые; в - дуговые
Рисунок 1.3 – Потенциометрические преобразователи
Реостатные (потенциометрические) преобразователи (реостаты и потенциометры) представляют собой переменные электрические сопротивления, величина которых зависит от положения токосъемного контакта X. Реостаты включаются в цепи, где измеряется их сопротивление R, а потенциометры - в цепи, где измеряются напряжения V, т.е. переменное сопротивление служит делителем напряжения. Характеристики реостатов и потенциометров выражаются зависимостями
 .
.
Наибольшее распространение получили реостаты и потенциометры непрерывной намотки, в которых сопротивлением служит, намотан в один ряд на каркас проволока, по зачищенной поверхности которой скользит токосъемный контакт. Различные типы потенциометрических преобразователей. Каркасы изготовляют из изоляционных материалов (пластмассы, текстолита, керамики); для намотки применяют проволоку из благородных металлов платины, золота, палладия, а также из константана, манганина, рома).
|
|
|
Использование потенциометров в измерительных цепях приводит к возникновению погрешностей. Наличие зоны нечувствительности, анной тем, что перемещение контакта в пределах одного витка проволоки не вызывает изменения выходного сигнала, неравномерность характеристики, вызванная непостоянством диаметра, удельного сопротивления провода, шага намотки, натяжения провода, люфт в механизме перемещения контакта приводят к появлению погрешности этого вида преобразователей.
Основной недостаток реостатных и потенциометрических преобразователей связан с наличием электрического подвижного контакта и возможностью его износа, загрязнения, разрыва. Этого недостатка лишены индуктивные и индукционные преобразователи.
Индуктивные преобразователи служат для преобразования перемещения в изменение индуктивности, а индукционные - для преобразования перемещения, в изменение взаимной индукции между двумя более, катушками. Индуктивный преобразователь представляет собой электромагнитную цепь, состоящую из катушки 1, мотанной на неподвижном, сердечнике 2, и подвижного сердечника 3. При изменении положения  подвижного сердечника (входная величина) относительно неподвижного меняется магнитное сопротивление
подвижного сердечника (входная величина) относительно неподвижного меняется магнитное сопротивление  воздушных зазоров при постоянном магнитном сопротивлении сердечника Rс и индуктивность катушки L. Эта зависимость выражается формулой
воздушных зазоров при постоянном магнитном сопротивлении сердечника Rс и индуктивность катушки L. Эта зависимость выражается формулой
 .
.
где  частота тока, Гц; S - площадь зазора, см2;
частота тока, Гц; S - площадь зазора, см2;  - магнитная проницаемость воздушного зазора, Г/м.
- магнитная проницаемость воздушного зазора, Г/м.
При прочих неизменных условиях индуктивность зависит только от величины воздушного зазора, т.е. от перемещения х подвижного сердечника. На рисунке приведен пример выполнения индуктивного преобразования с одной катушкой l, охватывающей перемещающийся внутри неё сердечник 3.
|
|
|

Рисунок 1.4 - Индуктивные и индукционные преобразователи
Для увеличения чувствительности применяют преобразователи с двумя катушками. В среднем положении сердечника сигнал на выходе равен нулю, а при переходе сердечника через среднее положение сигнал меняет фазу на 1800.
В индукционном преобразователе имеются две катушки, содержащие W1 и W2 витков. При изменении магнитного сопротивления RM цепи, например при изменении воздушного зазора , меняется взаимоиндукция М между катушками, которая определяется формулой
 .
.
Одна из катушек является первичной, питаемой от источника переменного тока. Во вторичной обмотке наводится э.д.с., которая зависит от изменения взаимоиндукции. Выходной величиной преобразователя является э.д.с., величина которой зависит от положения сердечника х.
Разновидность индукционного преобразователя, который называют дифференциально-трансформаторным. В нем имеются первичная питающая катушка W1 и две вторичные W’2 и W”2, которые включены дифференциально, т.е. навстречу друг другу, что повышает чувствительность устройства.
В частотном преобразователе, входной сигнал модулирует (изменяет) частоту выходного сигнала. До момента времени  1 входной сигнал имел величину Х1 , а выходной – частоту f1. После изменения входного сигнала до значения Х2 частота выходного сигнала стала f2 и затем соответственно Х3 и f3.
1 входной сигнал имел величину Х1 , а выходной – частоту f1. После изменения входного сигнала до значения Х2 частота выходного сигнала стала f2 и затем соответственно Х3 и f3.
Основным элементом частотных преобразователей является генератор высокой частоты с устройством для модуляции выходной частоты в зависимости от величины входного сигнала.
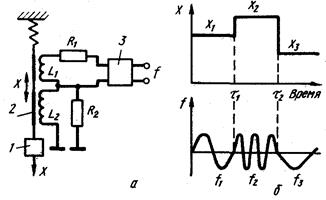
Рисунок 1.5 - Частотный преобразователь
Входная величина в виде перемещения X через передачу 1 изменяет положение электропроводного экрана 2 относительно катушек индуктивного датчика L1 и L2, меняя тем самым величины индуктивностей. Для генератора, показанного на схеме и имеющего, помимо контуров, R1,L1 и R2,L2, усилитель 3, частота автоколебаний, возникающих в контуре, определяется формулой
 .
.
С выхода усилителя 3 модулированное по частоте напряжение поступает либо непосредственно на дискретное регистрирующее устройство, либо на демодулятор, где превращается в непрерывный электрический сигнал, пропорциональный входной частоте, и далее на регистрирующий прибор. Диапазон рабочих частот преобразователей 4-8 кГц.
|
|
|
Схема передачи сигналов с использованием потенциометрических преобразователей. Потенциометр R1 расположен в первичном преобразователе, а потенциометр R2, электронный усилитель и реверсивный двигатель РД - в измерительном приборе. Подвижный контакт потенциометра R1 перемещается в соответствии с измеряемой величиной X. Подвижный контакт потенциометра R2 приводится в движение двигателем РД. Если подвижные контакты обоих потенциометров находятся в одинаковых положениях, то напряжение на входе усилителя  и двигатель не вращается. Если контакт потенциометра первичного преобразователя из-за очередного изменения контролируемого параметра смещается, то на выходе усилителя появляется напряжение рассогласования
и двигатель не вращается. Если контакт потенциометра первичного преобразователя из-за очередного изменения контролируемого параметра смещается, то на выходе усилителя появляется напряжение рассогласования  , которое усиливается и приводит в движение реверсивный двигатель и контакт Потенциометра R2 для устранения рассогласования. В схеме используется фазочувствительный усилитель, так как фаза сигнала разбаланса на входе усилителя зависит от взаимного расположения подвижных контактов потенциометров и меняется в момент прохождения состояния баланса одним из контактов. Изменение фазы сигнала разбаланса приводит к изменению фазы выходного сигнала усилителя и к перемене направления вращения двигателя, поэтому двигатель называется реверсивным.
, которое усиливается и приводит в движение реверсивный двигатель и контакт Потенциометра R2 для устранения рассогласования. В схеме используется фазочувствительный усилитель, так как фаза сигнала разбаланса на входе усилителя зависит от взаимного расположения подвижных контактов потенциометров и меняется в момент прохождения состояния баланса одним из контактов. Изменение фазы сигнала разбаланса приводит к изменению фазы выходного сигнала усилителя и к перемене направления вращения двигателя, поэтому двигатель называется реверсивным.

Рисунок 1.6– Потенциометрическая система передачи показаний
Широкое распространение получила дифференциально-трансформаторная система передачи показаний, схема которой приведена на рисунке. Эта схема, так же как и потенциометрическая, является компенсационной, т.е. такой, где сигнал одного преобразователя компенсируется встречным сигналом другого. Подвижный сердечник первичного дифференциально-трансформаторного преобразователя ДТ1 перемещается, например, под воздействием мембраны манометра р, а вторичного (компенсирующего) ДТ2 - реверсивным двигателем РД измерительного прибора. Первичные обмотки обоих преобразователей включены последовательно и питаются от клемм а и б усилителя. Вторичные обмотки обоих преобразователей состоят из двух секций, включенных навстречу друг другу.
|
|
|

а – первичный преобразователь; б - вторичный прибор
Рисунок 1.7 – Дифференциально-трансформаторная система
передачи показаний
Если сердечник такого преобразователя располагается посередине катушки, то сигнал на выходе вторичной обмотки (клеммы u и k), равен нулю, так как токи в обеих ее секциях равны, а встречное соединение секций обеспечивает вычитание токов. При смещении сердечника от среднего положения на выходе вторичной обмотки появляется сигнал той или иной фазы в зависимости от того, сместится сердечник вверх или вниз от среднего положения. Вторичные обмотки преобразователей ДТ1 и ДТ2 включены навстречу друг другу, и разность их сигналов поступает на входные клеммы в и г усилителя, с выходных клемм д и е которого усиленный управляющий сигнал приводит в движение двигатель РД и сердечник преобразователя ДТ2 в направлении устранения разбаланса. Таким образом, сердечник преобразователя ДТ2 постоянно следит за перемещением сердечника преобразователя ДТ1. Одновременно с сердечником двигатель РД перемещает стрелку на шкале прибора, положение которой соответствует положению сердечника первичного преобразователя и величине измеряемого Параметра (в данном случае давления Р). Переменное сопротивление R3 вместе со вторичной обмоткой трансформатора вторичного прибора служит для корректировки нуля прибора. Сопротивлениями R1 и R2 производятся настройка системы и согласование перемещений сердечников, так как они позволяют несколько варьировать выходными сигналами преобразователей. Рассмотренная система обеспечивает возможность передачи сигналов измерительной информации на расстояния до 250 м без появления дополнительной погрешности.
|
|
|
