 |


Самописцы предназначены для автоматической записи измеряемых глубин.
|
|
|
|
ЛекцИя №11
По учебной дисциплине
«Современные автоматизированные системы управления движением судов»
Тема: «Бортовые акустические измерители глубин, дистанций и направлений. Часть 3: Принцип действия и устройство навигационных эхолотов и гидролокаторов».
Учебный класс:
время: 1-2 час.
Место: 52 ауд.
Учебная и воспитательная цель: «Формирование у студентов целостного представления о современных автоматизированных системах управления движением судов»
Учебные вопросы и распределение времени:
Вступление................................................................................................5 мин.
1. Измерение дистанции ……...............................................................35 мин.
2. Измерение направления ………………………………...................35 мин.
Выводы и ответы на вопросы...................................................................5 мин.
Учебно-материальное обеспечение: проектор, слайды.
Учебная литература:
1. Алексишин В.Г., Козырь Л.А., Короткий Т.Р. Международные и национальные стандарты безопасности мореплавания. - Одесса: «Латстар», 2002.-257с.
2. Золотов В.В., Фрейдзон И.Р. Управляющие комплексы сложных корабельных систем.-Л.: «Судостроение», 1986.-232с.
3. Вагущенко Л.Л. Интегрированные системы ходового мостика. - Одесса: «Латстар», 2003.-170с.
4. Вагущенко Л.Л., Вагущенко А.Л., Заичко С.И. Бортовые автоматизированные системы контроля мореходности. - Одесса: «Фенікс», 2005.-272с.
5. Вагущенко Л.Л. Судовые навигационно-информационные системы. - Одесса: «Латстар», 2004.-302с
СТРУКТУРА ЛЕКЦИИ И МЕТОДИКА ЕЕ ИЗЛОЖЕНИЯ
Лекция начинается с короткого вступления, в котором доводится тема, ее значение в подготовке специалиста, целевая установка и план. Так же во вступлении доводится рекомендуемая литература и ее краткая характеристика.В основной части лекции при определении очередного вопроса плана, формулируется его связь с обеспечивающими учебными дисциплинами и будущей деятельностью специалиста.
|
|
|
Среди средств наблюдения, связи и управления в подводной среде особое место занимают гидроакустические станции (ГАС) активного действия, к которым, в частности, относятся навигационные эхолоты и гидролокаторы.
Навигационный эхолот предназначен для измерения глубин под килем судна-носителя, а гидролокатор для определения трех координат подводного объекта, находящегося в стороне от судна-Носителя: дистанции  , истинного пеленга (курсового угла) и угла цели
, истинного пеленга (курсового угла) и угла цели  (угла в вертикальной плоскости).
(угла в вертикальной плоскости).
Измерение дистанции
Принцип измерения дистанции до подводного объекта с помощью эхолота или гидролокатора заключается в измерении промежутка времени между посылкой зондирующего импульса в толщу воды и приходом отраженного от объекта (препятствия) эхо-сигнала к приемнику. Зная скорость распространения звука в воде, можно определить дистанцию до подводного объекта по формуле

где  — расчетное значение скорости звука в воде (1500 м/с).
— расчетное значение скорости звука в воде (1500 м/с).
Таким образом, задача об определении глубины под килем или дистанции до подводного объекта сводится к измерению весьма малого промежутка времени  . Конструктивно она может быть решена различными методами с применением в качестве индикаторных устройств электромеханических указателей глубин, самописцев и цифровых электронных указателей глубин.
. Конструктивно она может быть решена различными методами с применением в качестве индикаторных устройств электромеханических указателей глубин, самописцев и цифровых электронных указателей глубин.
Электромеханические указатели глубин предназначаются для визуального отсчета глубин и управления посылками акустических импульсов. Они используются только в эхолотах.
Указатель глубин с механической линейной разверткой времени (рис. 1) состоит из вращающейся планки 1 с неоновой лампочкой 2, трансформатора Т, кулачков З с контактами  и
и  , электродвигателя 5, коробки скоростей 4 и шкалы, разбитой в единицах глубины.
, электродвигателя 5, коробки скоростей 4 и шкалы, разбитой в единицах глубины.
|
|
|
Эхолот с электромеханическим указателем глубины работает следующим образом. Электродвигатель 5 вращает с постоянной частотой вращения планку 1 с неоновой лампочкой 2 и кулачком З. В момент прохождения неоновой лампочкой нулевого деления шкалы кулачок З размыкает контакт , при этом разрывается цепь питания обмотки посылочного реле 6 и его контакты  замыкаются под действием пружины 7. Конденсатор С разряжается через обмотку вибратора-излучателя (ВИ). При этом образуется колебательный контур, в котором возникают мощные затухающие колебания, и электромеханический преобразователь излучает в воду ультразвуковой импульс большой интенсивности.
замыкаются под действием пружины 7. Конденсатор С разряжается через обмотку вибратора-излучателя (ВИ). При этом образуется колебательный контур, в котором возникают мощные затухающие колебания, и электромеханический преобразователь излучает в воду ультразвуковой импульс большой интенсивности.
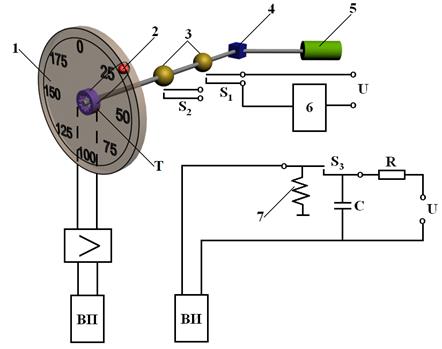
Рис. 1
Зондирующий импульс в основном максимуме диаграммы направленности распространяется ко дну, а в боковом — к вибратору-приемнику ВП. Боковой акустический импульс в вибраторе-приемнике преобразуется в слабый электрический сигнал, который после усиления поступает на первичную обмотку трансформатора Т. Со вторичной обмотки трансформатора напряжение подается на неоновую лампочку 2. Вспышка лампочки практически совпадает с нулем шкалы.
Зондирующий импульс в пределах основного максимума диаграммы направленности доходит до дна, отражается и принимается вибратором-приемником ВП. Слабая э.д.с., возникающая в обмотке вибратора, после усиления заставит вспыхнуть неоновую лампочку против деления шкалы, соответствующего измеряемой глубине. При следующем обороте планки рассмотренный процесс повторится. Из-за быстрого вращения планки с неоновой лампочкой нулевые вспышки и отметки глубин сливаются, и по шкале можно непрерывно отсчитывать глубину под килем судна.
Применение неоновой лампочки вызвано тем, что она практически безынерционна, т. е. мгновенно зажигается при подаче напряжения и мгновенно гаснет при отсутствии его; это обеспечивает точный отсчет глубин по шкале Частота вращения неоновой лампочки должна быть строго постоянной для данного диапазона глубин; это поддерживается с помощью автоматического регулятора частоты вращения электродвигателя.
При регистрации малых глубин необходимо «гасить» нулевую отметку. Это вызвано тем, что накопительный конденсатор разряжается на нулевой отметке, а для фиксации глубины под килем зарядится не успевает. Схема гашения нулевой отметки действует от контактов , которые в момент, соответствующий посылке импульса, отключают накопительный конденсатор от цепи разряда (на рис. 1 не показано). После прохождения неоновой лампочкой нулевой отметки шкалы схема разряда восстанавливается и импульсы, отраженные даже с малых глубин, отмечаются указателем эхолота.
|
|
|
Самописцы предназначены для автоматической записи измеряемых глубин.
В настоящее время наибольшее распространение получают самописцы с линейной механической разверткой в виде бесконечной ленты с закрепленными на ней пером и кулачком (рис. 2). Электропривод заставляет перо двигаться с постоянной скоростью по электротермической бумаге. В момент прохождения пером нулевого деления шкалы посылочные контакты срабатывают и подключают импульсный генератор к обмотке вибратора-излучателя, который посылает в воду зондирующий импульс.
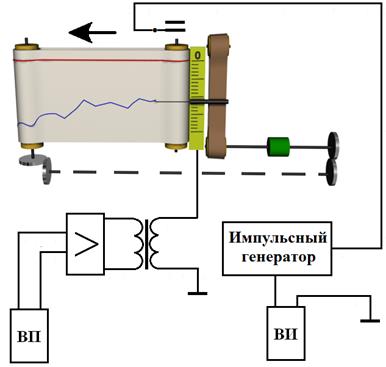
Рис. 2
К моменту возвращения эхо-сигнала от подводного объекта перо перемещается вдоль шкалы на некоторое расстояние, прямо пропорциональное глубине (дистанции). Усиленный электрический сигнал прожигает бумагу, регистрируя отметку глубины. Принцип фиксации нулевой отметки и гашения в самописце такой же, как и в электромеханическом указателе глубин.
Шкалы индикаторов рассчитывают на определенные глубины и дистанции. Масштаб шкалы определяется пределами значений измеряемых величин, также шириной бумажной ленты самописца. В индикаторах обычно предусматривается несколько диапазонов, измерение на которых начинается нуля, и поддиапазон, на котором просматривается слой воды с определенной глубины.
Цифровой указатель глубин (ЦУГ) применяют при электронном методе измерения промежутка времени между посылкой и приемом сигнала. ЦУГ состоит из преобразователя типа (время — цифра ПВЦ) и цифрового табло. Преобразователь время-цифра преобразует промежуток времени в прямо пропорциональное число импульсов, соответствующее глубине. Структурная схема ЦУГ приведена на рис. 3.
|
|
|
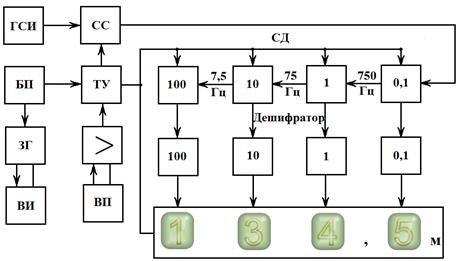
Рис. 3
Генератор счетных импульсов ГСИ вырабатывает счетные импульсы с частотой повторения  7500 Гц, которые поступают на вход схемы совпадения СС. Период следования, а значит, и цена одного счетного импульса соответствуют глубине
7500 Гц, которые поступают на вход схемы совпадения СС. Период следования, а значит, и цена одного счетного импульса соответствуют глубине
В момент излучения блок посылок БП вырабатывает импульс посылки, который поступает к задающему генератору ЗГ и триггеру управления ТУ. Последний сбрасывает счетные декады СД с цифрового табло в нулевое положение. Одновременно триггер управления выдает на схему совпадения разрешающий сигнал, и с этого момента счетные импульсы начинают поступать на счетную декаду десятых долей (0,1).
Задающий генератор вырабатывает мощный импульс, а вибратор-излучатель осуществляет посылку. Счетные декады подсчитывают счетные импульсы до тех пор, пока отраженный от дна эхо-сигнал не попадет на вибратор-приемник и после усиления не поступит в триггер управления. Последний снимает разрешающий сигнал со схемы совпадения, и счет импульсов прекращается. Одновременно импульс триггера управления включает цифровое табло, и подсчитанный счетными декадами результат подается через дешифратор на цифровое табло ЦТ.
Измерение направления.
Наиболее простой и распространенной гидроакустической станцией для горизонтального обзора водного пространства является гидролокатор с электромеханическим сканированием (перемещением) однолепестковой акустической антенны. Для измерения пеленга на подводный объект используется свойство направленности приемной антенны. Для этого антенну устанавливают в поворотно-выдвижном устройстве, обеспечивающем разворот антенны в горизонтальной плоскости на угол до 360  и в вертикальной плоскости на угол до 90° и, следовательно, зондирование всей толщи воды под килем судна.
и в вертикальной плоскости на угол до 90° и, следовательно, зондирование всей толщи воды под килем судна.
Обзор водного пространства может вестись в автоматическом режиме (только по горизонту) или вручную, плавно или дискретно. В автоматическом режиме сканирование ведется в установленном оператором секторе.
Обычно посылка зондирующих импульсов и прием эхо-сигналов происходят только при повороте антенны в одну сторону, например с левого борта на правый. При достижении правой границы регулируемого сектора антенна быстро возвращается в исходное положение, и процесс повторяется для определения направления на подводный объект дополнительно к самописцам гидролокаторы горизонтального действия, как правило, оборудуют слуховыми индикаторами, а также электронными индикаторами с секторной или круговой разверткой.
|
|
|
Основным недостатком гидролокатора с однолепестковой характеристикой направленности и электромеханическим сканированием является малая скорость обследования окружающего водного пространства, наличие значительных непросматриваемых участков (мертвых зон), особенно при движении судна со значительной скоростью. Кроме того, из-за малой скорости обследования водного пространства оператор не имеет возможности просматривать одновременно весь обзорный сектор.
Одновременное наблюдение за подводной обстановкой в пределах любого сектора, вплоть до кругового (360), позволяют вести гидролокаторы с электронным сканированием приемной характеристики и электронным индикатором радиально-кругового обзора. Здесь следует отметить, что повышение скорости обзора в гидролокации решается иными техническими средствами, чем в радиолокации. Это объясняется тем, что скорость распространения акустических колебаний в воде значительно меньше скорости распространения электромагнитных волн в воздухе (примерно в 200 000 раз), а значит, перекрываемый диапазон дальности при одной и той же скорости обзора в гидролокаторах во много раз меньше.
|
|
|
12 |
