 |


Структурная нотация и архитектура ВС Raspberry Pi
|
|
|
|
System (BCM2835) = [  ,
,  (
( ), E (TrustZone), U (IEM), U1 (reset controller)][1];
), E (TrustZone), U (IEM), U1 (reset controller)][1];
 =
=  [
[  –
–  –
–  ] – M
] – M
M  = {
= {  ,
,  –
–  ,
,  } – L1MS{
} – L1MS{  } –
} –  –
–  };
};
E (TrustZone) = {U (Protection Controller H (APB3)),  ,
,  , U2(CAI)};
, U2(CAI)};
U (IEM) = {H (APB3) <–> U1(IEC), U2(DVC), U3(HPM), U4(reset controller)}.
• I – устройство обработки потока команд
• B – целочисленные устройства исполнения
• Rg – регистры
• Core - ядро процессора;
• CshI – кэш инструкций;
• CshD – кэш данных;
• Csh1, 2, 3 – кэш данных 1, 2, 3 уровня;
• IO – интерфейс устройства ввода-вывода;
• E - исполнительное устройство;
• U – неспециализированное устройство (здесь большинство означает “контроллер”);
• F - устройство исполнения операций с плавающей точкой;
• TrustZone – набор инструкций процессора, позволяющих реализовывать защитный функционал, потоковую передачу и пр.;
• TrustZone System Protection Controller APB3 peripheral;
• L1MS – Level 1 Memory System;
• IEM - Intelligent Energy Management;
• IEC – Intelligent Energy Controller;
• DVC – Dynamic Voltage Controller;
• HPM – Hardware Performance Monitor.
При описании нотаций использовались блок схемы процессоров и модулей ВС (приведены далее по тексту), а также документация-руководство данных элементов[1]. Каждый указанный элемент имеет свою структуру, требующую описания, но не описывается в используемых руководствах.

Рисунок 1. Схема блочного устройства процессора ARM1176JZF-S
В архитектуру микропроцессора класса Raspberry входят следующие элементы:
· ARM11J6JZF-S (ARM11 Family)
· ARMv6 Architecture
· Single Core
· 32-Bit RISC
· 700 MHz Clock Rate
· BCM2835 256MB RAM
· 8 Pipeline Stages
· Branch Prediction
Основу микропроцессора составляет процессор ARM1176,процессор приложений, развернут в устройствах, начиная от смартфонов до цифрового телевидения, предоставляя средства чтения, представленияданных, защиты вычислительной среды, а также производительность до 1 ГГц в условиях низкой стоимости конструкций. Процессор ARM1176JZ-S поддерживает технологию ARMTrustZone® для защиты приложений и технологий ARMJazelle® для эффективного встроенного исполнения Java. Необязательные тесно связанные воспоминания упрощают миграцию процессора ARM9 ™ и дизайн в режиме реального времени, в то время как AMBA® 3 AXITM интерфейсы повышения производительности шины памяти. Поддержка DVFS позволяет номинально оптимизировать статическую и динамическую мощности архитектуры ARM11TM процессора [3].
|
|
|

Рисунок 2. Внутреннее строение процессораARM 1176
Raspberry основан на архитектуре RISC. RISC (компьютер с сокращённым набором команд) — архитектура процессора, в котором быстродействие увеличивается за счёт упрощения инструкций, чтобы их декодирование было более простым, а время выполнения — меньшим. Первые RISC-процессоры даже не имели инструкций умножения и деления. Это также облегчает повышение тактовой частоты и делает более эффективной суперскалярность (распараллеливание инструкций между несколькими исполнительными блоками). Основной идеей всех RISC (Reduced Instruction Set Computer), является увеличение быстродействия за счет сокращения количества операций обмена с памятью программ. Для этого каждую команду стремятся уместить в одну ячейку памяти. При ограниченной разрядности ячейки памяти это неизбежно приводит к сокращению набора команд микропроцессора.

Рисунок 3. Схема функционального устройства процессора ARM1176JZF-S
Все выполняемые команды микропроцессора связаны с соответствующими регистрами, позволяющими выполнять те или иные функции.
Таймер/счетчик событий – внутренний таймер, предназначенный длязапуска программы обработки прерывания при определенных условиях счета, в том числе и внешних событий.
Сторожевой таймер предназначен для защиты микроконтроллера отсбоев в процессе работы. При срабатывании сторожевого таймера происходит внутренний перезапуск работы микроконтроллера.
|
|
|
Порты ввода/вывода AVR имеют от 5 до 32 независимых линий ввода/вывода, причем каждый разряд любого порта может быть запрограммирован на ввод или на вывод.
Аналого-цифровой преобразователь – это 10-разрядный АЦП с устройством выборки/хранения и входным аналоговым мультиплексором.
Аналоговый компаратор предназначен для сравнения непрерывно изменяющихся сигналов. Входные аналоговые сигналы компаратора Uвх – анализируемый сигнал и Uоп – опорный сигнал сравнения, а выходной Uвых – дискретный или логический сигнал, содержащий 1 бит информацииn таймер/счетчик – дополнительные таймера/счетчики. Кроме того, можетсодержать широтно-импульсный модулятор (ШИМ), предназначенный дляформирования сигналов заданной длительности при определенных условиях.
Скоростной последовательный интерфейс SPI – последовательныйсинхронный интерфейс ввода/вывода, используется для передачи данных попротоколу SPI.
Асинхронный, дуплексный последовательный порт UART – последовательный порт ввода/вывода информации.[2]
Высокая производительность до 1Гг (в последних версиях ещё выше до 1.4Гг) обеспечивается тактовым генератором процессора BCM2835. В дополнение к MMU от ARM (memory management unit – блок управления памятью), BCM2835 также обладает вторым уровнем MMU для отображения ARM физических адресов на системной шины адреса. На рисунке 4 показаны основные адресные пространства, представляющие контроль. Это позволяет реализовать много эффективную систему управления памятью, при этом не расширяя схему микропроцессора в целом.
Addresses in ARM Linux are: • issued as virtual addresses by the ARM core, then • mapped into a physical address by the ARM MMU, then • mapped into a bus address by the ARM mapping MMU, and finally • used to select the appropriate peripheral or location in RAM.
Реализованные адреса, на основе ARMLinux,следуют следующему пути[5]:
· определение в качестве виртуальных адресов ядром ARM, затем
· отображение в физический адрес на ARM MMU, затем
· отображение в адрес шины отображением ARM MMU, и, наконец,
· распределение по модулям соответствующего периферийного устройства или определённому местоположению в оперативной памяти.
В обычной практике, стандарт BCM2835 Linux ядра обеспечивает непрерывное отображение по всей доступной оперативной памяти в верхней части памяти. Ядро конфигурируется для 1GB / 3GB разделена между ядром и пользовательского пространства памяти.
|
|
|
Виртуальные адреса в режиме ядра будет колебаться между 0xC0000000 и 0xEFFFFFFF.
Виртуальные адреса в пользовательском режиме (т.е. видели процессами, работающими в ARM Linux) будет варьироваться между 0x00000000 и 0xbfffffff.
Периферия (по физическому адресу 0x20000000) отображается в пространство виртуального адресаядра, начиная с адреса 0xF2000000. Таким образом, периферия представлена здесь на адресе шины0x7Ennnnnn и доступен в ARM канал по виртуальному адресу 0xF2nnnnnn.

Рисунок 4. Периферия BCM2835
Программное обеспечение периферии прямого доступа переводит эти адреса в физические или виртуальные. Программное обеспечение, представляющее доступ периферии, использующей технологию DMA,используетшины адреса. Программное обеспечение непосредственного доступа к ОЗУ используют физические адреса (начиная с 0x00000000). Программное обеспечение доступа к оперативной памяти с использованием технологии DMA используют шины адреса (начиная с 0xC0000000).
Большинство аппаратных конвейеров и периферия BCM2835 bus мастера, позволяют им эффективно удовлетворять свои собственные потребности в данных. Это уменьшает требования контроллера DMA к типу перевода памяти блок-к-блоку и поддерживает некоторыеиз более простых периферийных устройств. Кроме того, контроллер DMA обеспечивает предвыборку режима “только для чтения”, чтобы данные, которые будут введены в L2 кэш в ожидании его дальнейшего использования.
Контроллер DMA BCM2835 обеспечивает в общей сложности 16 каналов DMA. Каждый канал работает независимо от других и внутренне присуждает одной из 3-х системных шин. Это даёт возможность управлять шириной пропускной способности канала DMA при помощи настройки арбитра.
Более подробно, структура процессора включает также такие элементы как: вычислительное ядро (Core), модуль загрузки (LoadStoreUnit), предварительный модуль (PrefetchUnit), блок управления памятью(MMU), блок памяти 1 и 2 уровней, блок прерывания (InterruptHanding), AMBA интерфейс, блок кэш памяти, блок TCM, блок отладки (Debug), сопроцессор векторной плавающей точкой(VectorFloatingPoint), интерфейс сопроцессора (рис. 5).
|
|
|
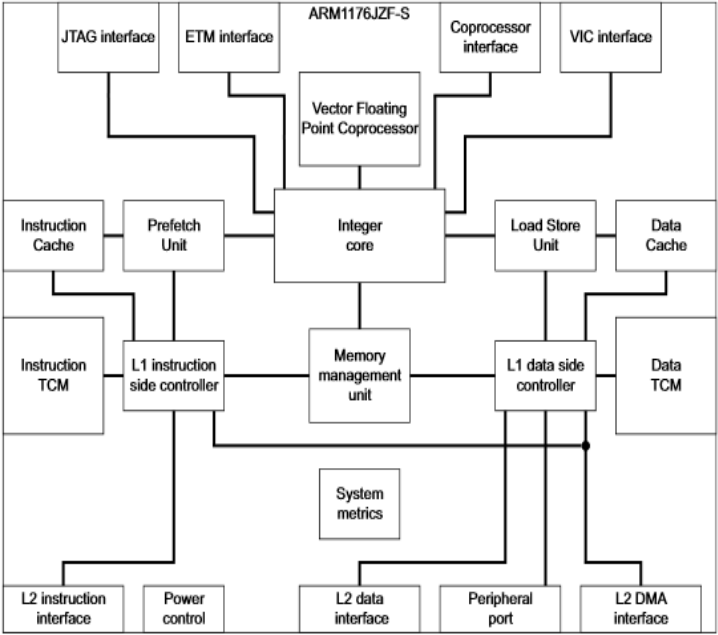
Рисунок 5. Структурная модель процессора[5]
|
|
|
