 |


Измерение уровня сыпучести
|
|
|
|
· Можно использовать разновидность поплавкового датчика.
 При этом нужно, чтобы поплавок не засыпало. Для этого делают поплавок на винте с большим шагом (т.е. витки винта расположены так, что гайка поплавка соскальзывает с винта). Винт медленно вращается, и если поплавок будет придавлен песком, то винт его вытащит из песка.
При этом нужно, чтобы поплавок не засыпало. Для этого делают поплавок на винте с большим шагом (т.е. витки винта расположены так, что гайка поплавка соскальзывает с винта). Винт медленно вращается, и если поплавок будет придавлен песком, то винт его вытащит из песка.
· Мембранный датчик

В резервуаре есть отверстия закрытые гибкими мембранами. Если песок достигает мембраны, то она прогибается и замыкает контакт(верхний контакт показывает, что резервуар полный, а нижний контакт показывает что, резервуар пустой).
Измерение параметров движения
К параметрам движения относятся: путь, скорость, ускорение.
Измерение пути
1. У автомобиля путь определяется числом оборотов колеса, при этом будет погрешность, которая определяется непостоянством диаметра колеса и проскальзыванием.
2. Радиолокация. Расстояние определяется по времени прохождения радиосигнала. Применяется для больших расстояний.
3. Эхолот. Применяется для измерения глубины.
4. Оптические дальномеры. Работают по принципу радиолокатора.
Измерение скорости
А)Механические датчики скорости
· Датчик с вязким трением линейной скорости

Цилиндр с поршнем, в поршне отверстие с небольшим сечением. Входное воздействие – на поршень. За счет вязкости среды поршень не может перемещаться мгновенно относительно цилиндра. Возникает сила, действующая на пружину и перемещающая движок потенциометра. Сила уравновешивается пружиной.
 ,
, 
где V – скорость,
g – коэффициент вязкости жидкости,
с – жесткость пружины,
DX – перемещение цилиндра.
|
|
|
В момент равновесия:
 ;
;
т.е.  ,
,
·  Датчик индукционной связи угловой скорости
Датчик индукционной связи угловой скорости
Магнит и диск расположены с зазором. Входная величина – скорость вращения магнита. При вращении магнита наводится ЭДС, возникают токи взаимоиндукции с полем магнита. При этом диск увлекается за магнитом. Возникает вращающий момент, который уравновешивается моментом пружины. Чем выше скорость вращения магнита, тем больше угол поворота диска. Угол поворота измеряется дифференциальным трансформаторным датчиком.
· Центробежный датчик угловой скорости (регулятора Уатта)

При вращении на грузы действуют центробежная сила, сжимающая пружину. Перемещение подвижной шайбы пропорционально скорости вращения.
Диоды обеспечивают однополупериодное выпрямление. При ω=0. Плунжер занимает среднее положение →ток через индикатор равен нулю. Когда ω≠0, индикатор отклонен.
Б)Электрические датчики частоты вращения

Тахогенератор постоянного тока
Постоянный магнит на статоре, а обмотка на роторе. Т.к. обмотка вращается, то нужна щеточная система для снятия постоянного напряжения через коллектор. Коллектор – это механический выпрямитель.

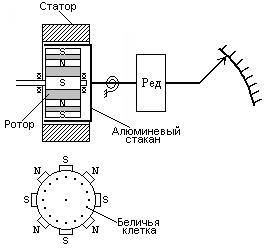
Асинхронный тахогенератор
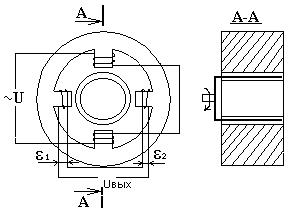
На вертикально расположенную катушку подается напряжение. Магнитное пульсирующее поле первичной обмотки пересекает вторичную обмотку. Если ротор неподвижен, то UВЫХ=  =0 В. При вращении ротора
=0 В. При вращении ротора  (алюминиевым стакан) в нем наводится ЭДС, возникают токи, которые создают свое магнитное поле. Магнитные поля статора и ротора взаимодействуют между собой и искажают общее поле тахогенератора, при этом магнитное поле тахогенератора пересекает вторичную обмотку, в ней наводится ЭДС= , где
(алюминиевым стакан) в нем наводится ЭДС, возникают токи, которые создают свое магнитное поле. Магнитные поля статора и ротора взаимодействуют между собой и искажают общее поле тахогенератора, при этом магнитное поле тахогенератора пересекает вторичную обмотку, в ней наводится ЭДС= , где  . Она тем больше, чем больше скорость вращения якоря.
. Она тем больше, чем больше скорость вращения якоря.
Использование до (2  6)103 об/мин
6)103 об/мин
Деление на статорные и роторные условное и используется только для объяснения физики процесса.
|
|
|
Синхронный тахогенератор
Состоит из двух машин.
 ;
; 

статор статор
| |||
 | |||


Беличья клетка нужна для раскрутки ротора. Между статором и ротором создается поле, магнитные линии которого колинеарны.
 ;
;  ;
; 
|
|
|
