 |


Электропривод по системе “Тиристорный преобразователь – двигатель” (ТП-Д).
|
|
|
|
Ответ: В системе ТП – Д двигатель постоянного тока независимого возбуждения питается от тиристороного преобразователя. Принципиальная схема системы изображена на рис.
 Среднее значение выпрямленного напряжения ТП.
Среднее значение выпрямленного напряжения ТП.
 , где
, где
U2 – действующее значение фазного напряжение вторичной обмотки питающего трансформатора (или сети в бестрансформаторных схемах).
M – число пульсаций выпрямленного напряжения;
A - угол задержки открывания тиристоров;
Ud0 – максимальное значение среднего выпрямленного напряжения при a=0.
Кривые выпрямленного напряжения с учетом явления коммутации вентилей, характеризуемой углам g, изображены на рис
Зависимость ЭДС ТП от напряжения управления Uу при линейной характеристике СИФУ представлена на следующем рисунке. При ее замене линеаризованной ТП как динамическое звено системы электропривода в режиме непрерывного тока описывается уравнением  , где
, где  - коэффициент усиления ТП по напряжению;
- коэффициент усиления ТП по напряжению;  - малая постоянная времени ТП, учитывающая дискретность, запаздывание и наличие фильтров в СИФУ.
- малая постоянная времени ТП, учитывающая дискретность, запаздывание и наличие фильтров в СИФУ.
Уравнение электрического равновесия в якорной цепи системы ТП-Д
 , где
, где 
Здесь Rя – сопротивления якорной цепи двигателя;
 - индуктивное сопротивление фазы трансформатора, обусловленное полями рассеяния, а х2 и х1 – индуктивные сопротивления рассеяния вторичной и первичной обмоток трансформатора;
- индуктивное сопротивление фазы трансформатора, обусловленное полями рассеяния, а х2 и х1 – индуктивные сопротивления рассеяния вторичной и первичной обмоток трансформатора;
Rдр – сопротивление сглаживающего дросселя;
Rтр – активное сопротивление обмоток фазы трансформатора, приведенное к вторичной цепи;
Rср. в – усредненное сопротивление вентилей
Имея в виду, что  ;
;  ;
;  , получим уравнение механической характеристики двигателя для любого режима работы
, получим уравнение механической характеристики двигателя для любого режима работы
 или
или 
Т. к.  , где
, где  , то
, то 
Отсюда следует, что в режиме непрерывного тока механические характеристики двигателя в системе ТП-Д при принятых допущениях аналогичны характеристикам системы ГД.
|
|
|
При  , получим уравнение статических характеристик
, получим уравнение статических характеристик
 или
или 
Уравнения статических механических и электромеханических характеристик двигателя для режима непрерывных токов можно представить и в следующем виде:


Семейство статических механических характеристик при различных a, изобра 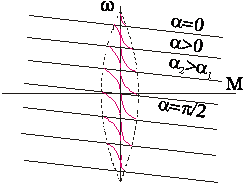 Жено на рис. Это прямые, отсекающие на оси ординат отрезки, соответствующие скорости идеального холостого хода
Жено на рис. Это прямые, отсекающие на оси ординат отрезки, соответствующие скорости идеального холостого хода

Однако в действительности при раздельном управлении комплектами вентилей (в случае двух комплектного преобразователя) или при питании от однокомплектного ТП в области малых нагрузок ток становится прерывистым, причем при Uy=0 и  среднее значение Ud становится
среднее значение Ud становится  . Появляется зона прерывистых токов, она тем больше, чем больше угол a.
. Появляется зона прерывистых токов, она тем больше, чем больше угол a.
Появление зоны прерывистого токов обусловлено тем, что в определенные промежутки времени мгновенное значение выпрямленного напряжения преобразователя становится меньше встречно действующей ЭДС двигателя, что видно из графика выпрямленного напряжения, и, как следует из уравнения равновесия ЭДС, разность Ud-e становится отрицательной. Ток должен изменить направление на противоположное. Но поскольку вентили обладают односторонней проводимостью, ток становится равным нулю. Вентили закрываются ток появляется вновь когда Ud станет больше е. При больших нагрузках несмотря на то, что в определенные промежутки времени мгновенное значение Ud становится меньше ЭДС двигателя, ток не прерывается, является непрерывным. Объясняется это тем, что при больших нагрузках запас электромагнитной энергии в цепи выпрямленного тока значительный. Возникающая при исчезновении тока ЭДС самоиндукции складывается с мгновенным выпрямленным напряжением ТП и в сумме они превышают ЭДС двигателя. Поэтому разность между этой суммой и ЭДС двигателя положительна и ток не прерывается. При малых нагрузках ЭДС самоиндукции оказывается недостаточной для поддержания тока и он прерывается.
|
|
|
Переходу от режима непрерывного тока к прерывистому соответствует режим начально-непрерывного тока, являющегося граничным между двумя указанными. Величина граничного тока зависит от угла a и параметров схемы
 , где
, где

Граничные токи (моменты) лежат на дуге эллипса, смещенного по оси ординат на величину  (см. рис. с механическими характеристиками).
(см. рис. с механическими характеристиками).
Отметим, что если двигатель питается от нереверсивного ТП, то система электропривода становится неполноуправляемой, ибо ток может протекать только в одном направлении. Соответственно этому механические характеристики во втором и третьем квадранте не существуют.
При наличии зоны прерывистых токов электромеханические и механические характеристики в этой зоне не выражаются аналитически. Они напоминают механические характеристики двигателя последовательного возбуждения, как показано на рис.. При уменьшении нагрузки скорость двигателя возрастает и увеличивается его ЭДС, являющаяся противодействующей, что вызывает уменьшение тока нагрузки преобразователя. Это приводит к уменьшению падения напряжения на внутренних сопротивлениях схемы, а также к уменьшению потерь среднего напряжения, обусловленного явлением коммутации. В связи с этим Ud возрастает. При идеальном холостом ходе двигателя исчезают падения напряжения на вентилях и внутренних сопротивлениях схемы и Ud повышается еще больше. Напряжение на двигателе (за время импульса тока) приближается к амплитуде питающего преобразователь напряжения переменного тока и скорость двигателя растет. Поэтому в зоне малых и нулевых нагрузок механические характеристики двигателя имеют мягкий характер, что и показано на графике. Скорость идеального холостого хода двигателя для этих характеристик могут быть определены из выражений:
 при
при  и
и
 при
при 
Здесь Е2ф. м – амплитуда фазной ЭДС вторичной обмотки питающего трансформатора или амплитуда фазного напряжения питающей сети (в бестрансформаторных схемах).
DUВ – падение напряжения в вентилях.
|
|
|
Используя уравнение динамики ТП, уравнение равновесия ЭДС в якорной цепи, уравнение механической характеристики двигателя в системе ТП-Д и уравнение движения электропривода при жестких механических связях, можно изобразить структурную схему системы ТП – Д, которая имеет вид.

|
При представлении уравнения  в виде
в виде
 , где
, где 
Структурная схема примет вид.
Двигатель в системе ТП – Д может работать во всех режимах. Двигательному режиму соответствует область в 1 и 3 квадратах, режиму динамического торможения соответствует характеристика, проходящая через начало координат при  . Режиму противовключения соответствует область, заключенная между осью моментов и характеристикой динамического торможения. Режиму рекуперации соответствует область между осью ординат во 2 и 4 квадратах и характеристикой динамического торможения.
. Режиму противовключения соответствует область, заключенная между осью моментов и характеристикой динамического торможения. Режиму рекуперации соответствует область между осью ординат во 2 и 4 квадратах и характеристикой динамического торможения.
|
|
|
