 |


На примерах кинематических схем
|
|
|
|
Методические указания к выполнению контрольной работы по дисциплине
«Конструкции подъемно-транспортных, строительных, дорожных средств и оборудования»
для студентов специальности 23.05.01 «Наземные транспортно-технологические средства», специализации «Подъёмно-транспортные, строительные,
дорожные средства и оборудование»
очной и заочной форм обучения
Составители: В.А. Кожевников
З.Н. Сосевич
А.Ю. Астраханский
Самара
2015
УДК. 656.259.12
Анализ кинематических схем механизмов подъемно-транспортных машин: методические указания к выполнению контрольной работы по дисциплине «Конструкции подъемно-транспортных, строительных, дорожных средств и оборудования» для студентов специальности 23.05.01 «Наземные транспортно-технологические средства» специализации «Подъёмно-транспортные, строительные, дорожные средства и оборудование» очной и заочной форм обучения / составители: В.А. Кожевников, З.Н. Сосевич, А.Ю. Астраханский. – Самара: СамГУПС, 2015. – 20 с.
В методических указаниях приведены примеры кинематических схем основных механизмов грузоподъемных машин (подъема, поворота, передвижения) с необходимыми пояснениями условных обозначений и описанием работы. На основе изложенного иллюстрационного материала сформулированы задания для выполнения контрольной работы, представлен порядок ее выполнения и правила оформления.
Методические рекомендации также будут полезны при изучении теоретического курса дисциплины «Конструкции подъемно-транспортных, строительных, дорожных средств и оборудования».
Утверждены на заседании кафедры 20.02.2015 г., протокол № 6.
Печатаются по решению редакционно-издательского совета университета.
|
|
|
Составители: Кожевников Вадим Александрович
Сосевич Зинаида Николаевна
Астраханский Алексей Юрьевич
Рецензенты: к.т.н., доцент кафедры БПГКР В.В. Денисов;
к.т.н., доцент кафедры СДМ В.П. Киреев
Под редакцией составителей
Подписано в печать 25.05.2015. Формат 60х90 1/16.
Усл. печ. л. 1,25. Заказ 73.
Введение
Кинематические схемы показывают взаимодействие элементов механизмов грузоподъемных машин во время работы и позволяют проследить способ передачи вращения от двигателя к приводным деталям – ходовым колесам, канатным барабанам, опорно-поворотным устройствам и т.д. Пользуясь кинематическими схемами, можно представить себе работу механизмов, подсчитать передаточное отношение редуктора и каждой пары и определить линейны и угловые скорости вращения барабана, ходового колеса, поворотной платформы и т.п.
Целью изучения дисциплины «Конструкции подъемно-транспортных, строительных, дорожных средств и оборудования» является формирование знаний и умений обучающихся в области общего устройства подъемно-транспортных, строительных, дорожных средств и оборудования, конструкции основных механизмов и деталей, функциональных возможностей и области применения.
В результате освоения дисциплины «Конструкции подъемно-транспортных, строительных, дорожных средств и оборудования» у обучающего формируются общекультурные (ОК-8, ОК-3, ОК-7), профессиональные (ПК-1, ПК-10, ПК-13, ПК-14) и профессионально-специальные компетенции (ПСК-2.1, ПСК-2.5, ПСК-2.6), в связи с которыми он должен:
- знать: классификацию, области применения подъемно-транспортных, строительных, дорожных средств и оборудования, требования к конструкции их узлов, агрегатов, систем; классификацию, типовые конструкции деталей и узлов подъемно-транспортных, строительных, дорожных средств и оборудования; классификацию, функциональные возможности и области применения основных видов механизмов подъемно-транспортных, строительных, дорожных средств и оборудования; компоновочные схемы подъемно-транспортных, строительных, дорожных средств и оборудования, их особенности, назначение и общую идеологию; конструкции подъемно-транспортных, строительных, дорожных средств и оборудования и тенденции их развития; условия эксплуатации, режимы работы подъемно-транспортных, строительных, дорожных средств и оборудования;
|
|
|
- уметь: идентифицировать и классифицировать механизмы и устройства, используемые в конструкциях подъемно-транспортных, строительных, дорожных средств и оборудования, при наличии их чертежа или доступного для разборки образца и оценивать их основные качественные характеристики; анализировать и оценивать влияние конструкции на эксплуатационные свойства агрегатов и подъемно-транспортных, строительных, дорожных средств и оборудования в целом;
- владеть: инженерной терминологией в области конструкций подъемно-транспортных, строительных, дорожных средств и оборудования; методикой исследования и сравнительного анализа конструкций подъемно-транспортных, строительных, дорожных средств и оборудования; методикой классификации конструкций подъемно-транспортных, строительных, дорожных средств и оборудования в целом, а также методикой классификации их отдельных механизмов и устройств.
После выполнения контрольной работы у обучающегося должны сформироваться знания и умения, присущие вышеописанным компетенциям.
Целью данных методических указаний является закрепление студентами навыков правильного чтения, самостоятельного анализа и синтеза кинематических схем механизмов подъемно-транспортных машин.
Устройство механизмов подъемно-транспортных машин
на примерах кинематических схем
Детали и элементы механизмов на кинематических схемах изображаются условными обозначениями, приведенными в таблице 1.1 [1].
Таблица 1.1 – Условные обозначения деталей и элементов механизмов на кинематических схемах
|
|
|
| № | Обозначение | Наименование |

| Вал, валик, стержень, ось, шатун и т.д. Неподвижное звено (стойка) | |

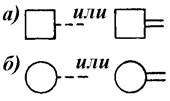
| Вращение вала а) в одном направлении; б) в обоих направлениях; в) в обоих направлениях с ограничением с двух сторон | |
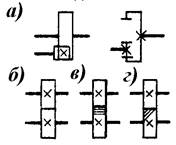
| Привод: а) общее обозначение; б) электромашинный | |
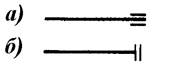
| Подшипники скольжения и качения на валу (без уточнения типа): а) радиальные; б) упорные | |

| Подшипники скольжения: а) радиальные; б) радиально-упорные; в) упорные | |

| Подшипники качения: а) радиальные; б) радиально-упорные; в) упорные | |

| Тормоз (общее обозначение без уточнения типа); |
Продолжение таблицы 1.1
| № | Обозначение | Наименование | |

| Соединение детали с валом, стержнем: а) неподвижное; б) подвижное | ||

| Маховик на валу | ||


| Муфты: а) общее обозначение без уточнения типа; б) нерасцепляемая (неуправляемая) глухая; в) нерасцепляемая упругая; г) сцепляемая (управляемая); д) автоматическая (самодействующая); е) соединительная двух валов (глухая зубчатая) | ||
| Передачи зубчатые (цилиндрические): а) внутреннее зацепление; б) внешнее зацепление (общее обозначение без уточнения типа зубьев); в) внешнее зацепление с прямыми зубьями; г) внешнее зацепление с косыми зубьями | ||
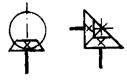
| Передача зубчатая коническая (общее обозначение без уточнения типа зубьев) | ||

| Передачи зубчатые со скрещивающимися валами: а) червячная с цилиндрическим червяком; б) червячная глобойдная | ||

| Винтовая передача (гайка на винте передающем движение): а) неразъемная; б) разъемная | ||
| № | Обозначение | Наименование | |

| Рычаг переключения | ||

| Кулачок плоский вращающийся | ||

| Соединение частей звена неподвижное | ||

| Кинематическая пара вращательная | ||
Механизмы подъема груза являются основными механизмами кранов и предназначены для перемещения груза в вертикальном направлении (подъем или опускание), могут иметь одну и ту же принципиальную схему, но разное конструктивное исполнение. Рассмотрим устройство механизма подъема на примере мостового магнитного крана (рисунок 1.1) [2].
|
|
|

Рисунок 1.1 – Кинематическая схема грузоподъемного механизма мостовой магнитного крана):
1 – промежуточный вал; 2 – шестерня редуктора; 3 – подшипник редуктора; 4 – корпус редуктора
5 – тормозной шкив; 6 – электродвигатель; 7 – грузовой барабан; 8 – канат; 9 – уравнительный блок;
10 – блоки крюковой подвески; 11 – электромагнит; 12 – крюк; 13 – кабель; 14 – кабельный барабан;
15 – открытая передача привода кабельного барабана; 16 – зубчатое колесо редуктора
Особенностью данного типа крана является то, что к крюковой подвеске 12 его тележки подвешивают грузовой электромагнит 11. Питание катушек грузового электромагнита производится постоянным током по гибкому кабелю 13, один конец которого закреплен на барабане 14, установленном на тележке, а другой присоединен к катушкам электромагнита. Кабельный барабан монтируют на отдельном валу, который вращается от вала грузового барабана 4 зубчатой передачей 15, заключенной в закрытом сварном кожухе. В некоторых конструкциях кранов кабельный барабан приводится во вращение через цепную передачу, что менее надежно вследствие возможного обрыва цепи. Связь кабельного барабана 14 с валом грузового барабана 7 обеспечивает сматывание кабеля и движение крюка. Грузовой барабан 7 приводится в действие от вала электродвигателя 6 через муфту 5, выполняющую одновременно роль шкива тормоза, и двухступенчатый цилиндрический редуктор 4, каждая ступень которого состоит из шестерни 2 и зубчатого колеса 16. Валы редуктора опираются на подшипники 3, установленные симметрично в стенках корпуса редуктора. Первый вал редуктора является быстроходным, второй средним, третий тихоходным. Быстроходный вал редуктора в представленной конструкции объединен с промежуточным валом 1, обеспечивающим передачу движения на некоторое расстояние между. Количество ступеней у разных редукторов может быть различным (в основном две или три). Иногда между редуктором и грузовым барабаном может располагаться дополнительная открытая передача. Полиспаст данного грузоподъемного механизма образован канатом 8 и тремя блоками, верхний 9 из которых является уравнительным, нижние 10 входят в конструкцию крюковой подвески. Кратность полиспаст данного механизма равна двум и определяется по количеству ветвей каната.
Механизм передвижения предназначен для перемещения грузоподъемной машины (ее механизмов, металлоконструкции, груза) по территории производственной площадки. Механизмы передвижения мостовых кранов бывают трех типов: с тихоходным трансмиссионным валом, быстроходным валом и без трансмиссионного вала с индивидуальным приводом. На рисунке 1.2, а показана схема механизма передвижения мостового крана с тихоходным валом. Механизм состоит из электродвигателя 1, колодочного тормоза 2, двухступенчатого цилиндрического редуктора 3, передающего вращение через зубчатые муфты 4 трансмиссионному валу 5 и далее двухребордным ходовым колесам 6. Недостаток такого привода – наличие трансмиссионного вала большого диаметра для передачи большого крутящего момента. Такой вал требует применения муфт и подшипников большого размера, что увеличивает массу и размеры всего механизма [3].
|
|
|

Рисунок 1.2 – Кинематические схемы механизмов передвижения мостовых кранов:
1, 7, 20 – электродвигатели; 2, 8 – тормозу; 3, 13, 18 – цилиндрические двухступенчатые редукторы;
4, 10, 11, 12, 14, 19 – зубчатые муфты; 5, 9 – трансмиссионные валы; 6, 16, 17 – двухребордные
крановые колеса; 15 – буксы (подшипники)
В механизме с быстроходным валом (рисунок 1.2, б), электродвигатель 7 имеет два выходных вала, соединенных с трансмиссионным валом 9 зубчатыми муфтами 10 и 11. Причем на последней смонтирован тормозной шкив для тормоза 8. Соединение зубчатыми муфтами предохраняет вал от искривлений, подшипники вала и подшипники электродвигателя – от перегрузок, вызываемых неточностью установки при монтаже крана.
Трансмиссионный вал состоит из отдельных секций, соединенных компенсирующими муфтами 12, и опирается на подшипники качения. Концевые секции быстроходного вала соединены с цилиндрическими двухступенчатыми редукторами 13, установленными на концах площадки крана. Выходные валы редукторов передают вращение посредством муфт 14 валам ходовых колес 16. Последние жестко закреплены на валах, смонтированных посредством сферических двухрядных самоустанавливающихся подшипников в буксах 15. Буксы с помощью сухарей и болтов жестко соединены в специальных нишах концевых балок.
В механизме передвижения с индивидуальным приводом (рисунок 1.2, в) каждое ходовое колесо 17 получает вращение от собственного электродвигателя 20 через редуктор 18 и затормаживается индивидуальным тормозом 19. При такое схеме привода из конструкции механизма передвижения исключается громоздкий трансмиссионный вал с опорами и муфтами. Нагрузка между приводами распределяется равномерно, а суммарная мощность электродвигателей не превышает мощности одного центрального двигателя. При этом маховые моменты роторов двигателей уменьшаются и облегчается пусковой режим. Электрическая схема включения двигателей обеспечивает синхронность их работы.
В мостовых кранах общего назначения в механизмах их передвижения используются двухребордные ходовые колеса. При числе колес с каждой стороны моста больше двух их объединяют в тележки с балансированной подвеской.
Механизм поворота предназначен для вращения поворотной части крана вокруг вертикальной оси. Механизмы поворота по компоновке подразделяются на две группы: с горизонтальным и вертикальным расположением двигателя.
Механизм поворота крана-погрузчика (рисунок 1.3) состоит из червячного редуктора 1, электродвигателя 3, тормоза 4 и вертикального вала 2, расположенных на поворотной части оголовка 9. Редуктор, тормоз и электродвигатель закреплены на одной раме, имеющей болтовое крепление с оголовком. Электродвигатель установлен на лапах. Вал электродвигателя соединен с валом червячного редуктора полумуфтой с упругими втулками и пальцами. Одна полумуфта служит тормозным шкивом и ее охватывают колодки тормоза 4. Червячный вал 5 вращается в радиальных и радиально упорных шарикоподшипниках, расположенных в корпусе редуктора. В зацеплении с червяком вала находится бронзовый венец, который зажат между двумя дисками 7, поджимаемыми пружиной 6 [4].
Наружная поверхность дисков выполнена в виде конуса. Внутренняя поверхность бронзового венца обработана под двухсторонний конус, имеющий хорошее сопряжение с конусами дисков для передачи крутящего момента. Нижний диск упирается в выступ вертикального вала и сидит неподвижно на шпонке. Верхний диск имеет возможность смещаться по валу и шпонке в осевом направлении. Пружина нажимает на верхний диск, зажимая венец между двумя дисками и соединяя его с валом. Усилие нажатия пружины регулируется гайкой 10, навернутой на верхний конец вала. Контр гайка не позволяет гайке отворачиваться. Нажатие пружины регулируется после снятия колпака 11, прикрепленного болтами к крышке редуктора. Выходная шестерня редуктора находится в зацеплении с шестерней вертикального вала, на нижнем конце которого закреплена цевочная шестерня 12. Катящаяся по цевочному венцу 13 неповоротного оголовка 8. Вертикальный вал опирается на втулки стакана, закрепленного в металлоконструкции поворотного оголовка 9.

Рисунок 1.3 – Кинематическая схема грузоподъемного механизма мостовой магнитного крана):
1 – червячный редуктор; 2 – вертикальный вал; 3 – электродвигатель; 4 – тормоз; 5 – червячный вал (червяк); 6 – прижимная пружина; 7 – фрикционный диск; 8 – неповоротный оголовок; 9 – поворотный оголовок; 10 – регулировочная гайка и контрогайка; 11 – колпак; 12 – цевочная шестерня;
13 – цевочное колесо
1.2. Индивидуальное задание для выполнение контрольной работы
и порядок ее выполнения
Вариант индивидуального задания (таблица 1.2) определяет преподаватель по двум последним цифрам шифра зачетной книжки студента. Задание содержит в себе четыре числа, отделенных запятыми. Первое число обозначает номер исходных данных из таблицы 1.3 для выполнения расчетов скоростей движений. Второе, третье и четвертое числа обозначают номера кинематических схем, представленных в таблице 1.4.
Студент должен самостоятельно изучить условные обозначения кинематических схем, используя государственные стандарты [1, 5], и согласно варианту индивидуального задания выполнить анализ кинематических схем механизмов. Кинематические схемы для примеров вариантов заданий были взяты из следующих источников [2, 3, 4, 6, 7, 8, 9, 10].
Таблица 1.2 – Варианты заданий для выполнения контрольной работы
| Последний номер шифра (зачетной книжки) студента | |||||||||||
| Предпоследний номер шифра студента | 1; 1,2,3 | 2; 4,5,6 | 3; 7,8,9 | 4; 10,11,12 | 5; 13,14,15 | 6; 16,17,18 | 7; 19,20,21 | 8; 22,23,24 | 9, 25,26,27 | 10, 28,29,30 | |
| 11, 31,32,33 | 12, 34,35,36 | 13, 1,3,5 | 14, 7,9,11 | 15, 13,15,17 | 16, 19,21,23 | 1, 25,27,29 | 2, 31,33,35 | 3, 2,4,5 | 4, 8,10,11 | ||
| 5, 14,16,17 | 6, 20,22,24 | 7, 26,28,30 | 8, 32,34, 35 | 9, 19,17,25 | 10, 3,36,14 | 11, 22,30,4 | 12, 11,20,27 | 13, 35,8,16 | 14, 24,32,5 | ||
| 15, 13,21,30 | 16, 2,10,18 | 1, 26,34,7 | 2, 16,23,31 | 3, 4,12,25 | 4, 28,36,17 | 5, 1,11,21 | 6, 31,6,16 | 7, 26,36,34 | 8, 3,13,23 | ||
| 9, 33,8,18 | 10, 5,15,25 | 11, 35,10,20 | 12, 7,17,24 | 13, 2,12,13 | 14, 22,28,32 | 15, 9,19,34 | 16, 4,24,30 | 1, 1,5,7 | 2, 3,9,11 | ||
| 3, 13,17,19 | 4, 15,21,23 | 5, 25,29,31 | 6, 27,33,35 | 7, 1,6,8 | 8, 4,9,12 | 9, 14,18,20 | 10, 16,22,24 | 11, 26,30,32 | 12, 2,34,36 | ||
| 13, 1,7,15 | 14, 3,12,23 | 15, 5,17,27 | 16, 7,21,33 | 1, 13,29,4 | 2, 19,35,10 | 3, 25,6,16 | 4, 31,12,22 | 5, 2,18,28 | 6, 8,24,31 | ||
| 7, 14,30,32 | 8, 20,26,36 | 9, 36,32,26 | 10, 34,25,20 | 11, 30,22,14 | 12, 24,15,8 | 13, 18,10,12 | 14, 6,33,27 | 15, 4,35,2 | 16, 31,23,17 | ||
| 1, 29,19,11 | 2, 25,15,5 | 3, 2,17,1 | 4, 3,9,15 | 5, 1,35,18 | 6, 33,3,20 | 7, 5,31,16 | 8, 29,7,22 | 9, 9,27,14 | 10, 25,11,24 | ||
| 11, 13,26,12 | 12, 21,15,26 | 13, 17,19,10 | 14, 5,28,36 | 15, 4,30,34 | 16, 6,9,32 | 1, 7,17,27 | 2, 5,15,25 | 3, 9,19,29 | 4, 13,23,33 |
Таблица 1.3 – Исходные данные для выполнения расчетов скоростей движений
| № | Частота оборотов ротора электро-двигателя, об/мин | Диаметр вращающегося выходного звена, мм | Длина наматываемого каната на барабан, м | Вылет стрелы, м |
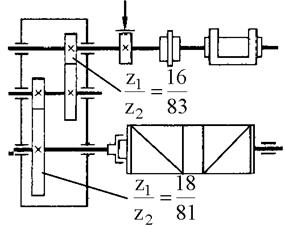
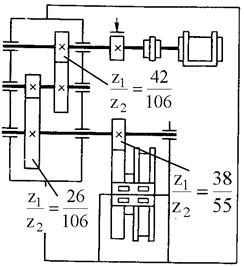
Таблица 1.4 – Кинематические схемы механизмов подъемно-транспортных машин
| № | Кинематическая схема | № | Кинематическая схема |

| 
| ||

| 
| ||

| 
|
Продолжение таблицы 1.4

| 
| ||

| 
| ||

| 
|
Продолжение таблицы 1.4

| 
| ||

| 
| ||

| 
|
Продолжение таблицы 1.4

| 
| ||

| 
| ||

| 
|
Продолжение таблицы 1.4

| 
| ||

| 
| ||

| 
|
Продолжение таблицы 1.4

| 
| ||

| 
| ||

| 
|
Последовательность выполнения анализа кинематической схемы следующая:
1. Начертить кинематические схемы (согласно варианту задания) механизмов грузоподъемных машин в точности, как они представлены в таблице 1.4, и отметить номерными позициями на каждой схеме все условные обозначения деталей и конструктивных элементов механизмов: электродвигатели, валы, оси, подшипники, соединительные муфты, тормозы, блоки, барабаны, канаты, крюковые подвески (или крюки), ходовые колеса, передачи, редукторы (включая их шестерни, зубчатые колеса, звездочки, валы, подшипники и корпусные детали) и т.п. Также необходимо указать основные конструктивные размеры механизма: высоту подъема, диаметры вращаемых выходных звеньев, колею, базу, межосевые расстояния редукторов и т.п.
2. Свести в специальную таблицу 1.5 номера всех позиций и соответствующие им названия деталей механизмов с обязательным указанием характеристик (тип, назначение).
3. Определить тип механизма, его назначение и область применения; описать его работу (последовательность передачи движений между связанными конструктивными элементами).
4. Выполнить расчеты передаточных чисел передач (редукторов) и полиспастов, изображенных на кинематических схемах, рассчитать частоты вращения выходных звеньев механизмов, а также скорости перемещения (подъема, передвижения, поворота).
После выполнения контрольной работы студент сдает ее преподавателю на контрольное рецензирование, после чего отчитывается о ходе ее выполнения. В ходе отчета студент должен показать знание типов исследуемых механизмов, назначения, устройства и работы, а также знания условных обозначений деталей и конструктивных элементов.
1.3. Пример оформления оформление анализа одной кинематической схемы
со всеми необходимыми пояснениями на примере механизма передвижения
1. Чертеж кинематической схемы с номерными позициями деталей (рисунок 1.4).

Рисунок 1.4 – Пример оформления чертежа кинематической схемы
2.Таблица с характеристиками деталей механизма (таблица 1.5).
Таблица 1.5 – Характеристики деталей механизма
| № поз. | Наименовании детали согласно условному обозначению | Назначение детали | Характеристика (тип) |
| Редуктор (корпус) | Соединяет приводные и рабочие узлы механизмов, уменьшает частоту вращения и увеличивает передаваемый крутящий момент | Цилиндрический, трехступенчатый | |
| Шестерня | Передает вращательное движение от паразитной шестерни на тихоходный вал цилиндрического редуктора | Цилиндрическая, быстроходного вала редуктора | |
| Подшипник | Служит опорой для быстроходного вала редуктора | Скольжения | |
| Колесо | Служит опорой конструкции машины на головку рельса и обеспечивает передвижение трением качения (рабочий узел механизма) | Приводное рельсовое, одноребордное, цилиндрическое | |
| Вал редуктора | Служит выходным звеном передаточного механизма (редуктора) и опорой шестерни | Тихоходный | |
| Вал редуктора | Служит одним из промежуточных звеньев передаточного механизма (редуктора) и опорой шестерни | Промежуточный | |
| Шестерня | Служит совместно с другими промежуточными шестернями для передачи вращательного движения на необходимое расстояние между трансмиссионным валом и осью приводного колеса (количество таких шестерен зависит от компоновки механизма, колесной базы, типа редуктора и т.п.) | Промежуточная (паразитная) | |
| Муфта | Служат для соединения трансмиссионных валов с тихоходным валом червячного редуктора | Упругая | |
| Редуктор (его корпус) | Соединяет приводные и рабочие узлы механизмов, уменьшает частоту вращения и увеличивает передаваемый крутящий момент | Червячный | |
| Вал червяка | Служит входным звеном червячного редуктора и опорой червяка | Быстроходный | |
| Подшипник | Опора для быстроходного вала редуктора | Скольжения | |
| Червяк | Обеспечивает передачу вращательного движения от быстроходного вала к червячному колесу | ––––– | |
| Ось рельса | Служат жесткими опорами всей конструкции крана и направляющими для ее передвижения | Крановый рельс | |
| Подшипник | Служит опорой оси колеса | Скольжения |
Продолжение таблицы 1.5
| Тормоз | Служит для принудительного (управляемого) прекращения инерционного вращения деталей (для торможения) | Колодочный или ленточный (радиальный) | |
| Колесо | Служит только опорой конструкции машины на головку рельса (рабочий узел механизма) | Холостое, рельсовое, одноребордное, цилиндрическое | |
| Электродвигатель | Служит источником вращательного движения (приводной узел механизма) | ––––– | |
| Муфта | Служит для соединения вала электродвигателя и входного вала червячного редуктора | Упругая | |
| Червячное колесо | Обеспечивает передачу движения от червяка на трансмиссионные валы | ––––– | |
| Вал | Связывает между собой тихоходный и быстроходный валы двух редукторов (длина валов зависит от размера колеи) | Трансмиссионный | |
| Муфта | Служат для соединения трансмиссионных валов с быстроходным валом цилиндрического редуктора | Упругая | |
| Шестерня | Передает вращение от быстроходного вала цилиндрического редуктора паразитной шестерне | Цилиндрическая, тихоходного вала редуктора |
|
|
|
