 |


Глава 4. основы управления
|
|
|
|
4.1. ОБЩИЕ ПОЛОЖЕНИЯ
В теории управления принято считать, что системы с управлением создаются для достижения конкретных целей, которые определяются в рамках других наук, занимающихся исследованием конкретных систем. В зависимости от природы (люди или технические устройства) принято выделять три типа систем с управлением:
· организационные (социальные) системы управления;
· технические системы управления;
· организационно-технические (комплексные) системы управления.
Рассмотрим основные положения по управлению в организационно-технических системах, опираясь на базовые понятия.
Общая структурная схема системы с управлением может быть представлена в виде, показанном на рис. 4.1.
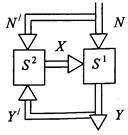
Рис. 4.1. Общая структурная схема системы управлением
Здесь S l - объект управления, S 2 - управляющая система, N - информация о состоянии внешней среды (внешние воздействия на объект управления), N' - информация о состоянии внешней среды, имеющаяся в управляющей системе, X – командная информация, Y - информация о состоянии объекта управления, Y’ - информация о состоянии объекта управления, имеющаяся в управляющей системе.
Управляющая система реализует задачи целеполагания, стабилизации, выполнения программы, слежения или оптимизации и тем самым обеспечивает либо удержание выходных характеристик системы при изменениях внешней среды в требуемых пределах, либо выполнение системой действий по изменению значений ее характеристик или характеристик внешней среды.
Объект управления является исполнительным инструментом, реализующим основную функцию системы.
Система связи, являясь частью системы управления, обеспечивает обмен управляющей информацией между управляющей системой и объектом управления.
|
|
|
Задачами теории управления при таком рассмотрении являются:
· синтез структуры и параметров объекта управления, соответствующих цели (закону функционирования) создаваемой системы с управлением;
· синтез структуры и параметров управляющей системы, т.е.построение структуры управления с учетом ограничений по затратам различного вида (численность управленческого персонала и др.); определение мест размещения центров обработки информации; определение массивов информации, подлежащих передаче, хранению и обработке;
· синтез структуры и параметров системы связи.
Единых методов решения перечисленных задач для всех типов систем на настоящее время не существует. Однако для всех типов систем с управлением признается существование ряда аксиом и принципов управления, знание которых позволяет квалифицированно решать задачи управления.
4.1.1. АКСИОМЫ ТЕОРИИ УПРАВЛЕНИЯ
Для управления необходимо выполнение ряда естественных условий, которые сформулируем в виде аксиом.
Аксиома 1. Наличие наблюдаемости объекта управления. В теории управления ОУ считается наблюдаемым в состоянии z(t)
на множестве моментов времени Т, при входном воздействии *(/) и отсутствии возмущений, если уравнение наблюдения динамической системы, представленное в виде
y*(i)=g[t,x(i),z*(t)],
где y(t) - некоторая реализация выходного процесса, доступная для регистрации, имеет единственное решение
z*(0=z(t)ÎZ.
Если это утверждение справедливо для любого z(t)ÎZ, то объект считается полностью наблюдаемым.
Это выражение означает, что определение любого из состояний ОУ (т.е. его наблюдаемость) реализуется только в том случае, если по результатам измерения выходных переменных y*(t) при известных значениях входных переменных x(t) может быть получена оценка z*(t) любой из переменных состояния z(t).
Такая задача в теории систем известна как задача наблюдения. В организационно-технических системах управления эта задача реализуется функцией контроля текущего состояния ОУ и воздействий внешней среды. Без этой информации управление или невозможно, или неэффективно.
|
|
|
Аксиома 2. Наличие управляемости - способности ОУ переходить в пространстве состояний Z из текущего состояния в требуемое под воздействиями управляющей системы. Под этим можно понимать перемещение в физическом пространстве, изменение скорости и направления движения в пространстве состояний, изменение структуры или свойств ОУ. Если состояние ОУ не меняется, то понятие управления теряет смысл.
Аксиома 3. Наличие цели управления. Под целью управления понимают набор значений количественных или качественных характеристик, определяющих требуемое состояние ОУ.
Если цель неизвестна, управление не имеет смысла, а изменение состояний превращается в бесцельное блуждание. Цель отображается точкой, в которую надо перевести систему из существующего состояния, или траекторией перевода ОУ в требуемое состояние в виде, например, аддитивной свертки

с ограничениями типа
 ,
,
где y i - i-я характеристика;
a i - важность (вес) i-й характеристики;
bi - расход ресурсов на поддержание i -и характеристики в требуемом состоянии;
с - общее количество ресурсов.
Аксиома 4. Свобода выбора - возможность выбора управляющих воздействий (решений) из некоторого множества допустимых альтернатив. Чем меньше это множество, тем менее эффективно управление, так как в условиях ограничений оптимальные решения часто остаются за пределами области адекватности. Если имеется единственная альтернатива, то управление не требуется. Если решения не влияют на изменение состояния ОУ, то управления не существует.
Аксиома 5. Наличие критерия эффективности управления. Обобщенным критерием эффективности управления считается степень достижения цели функционирования системы.
Кроме степени достижения цели качество управления можно оценивать по частным критериям: степени соответствия управляющих воздействий требуемым состояниям ОУ, качеству принимаемых решений, точности управления. Для оценки систем управления военного назначения вводятся требования к управлению по показателям устойчивости, непрерывности (длительности цикла управления), оперативности и скрытности.
|
|
|
Аксиома 6. Наличие ресурсов (материальных, финансовых, трудовых и т.д.), обеспечивающих реализацию принятых решений. Отсутствие ресурсов равносильно отсутствию свободы выбора. Управление без ресурсов невозможно.
4.1.2. ПРИНЦИП НЕОБХОДИМОГО РАЗНООБРАЗИЯ ЭШБИ
Из аксиом управления следует, что управление заключается в ограничении разнообразия состояний управляемого объекта. Это означает, что энтропия объекта управления должна быть равна нулю Н(Y) = 0. Иными словами, неопределенность относительно состояний объекта управления в управляющей системе должна полностью отсутствовать и объект управления должен находиться в строго определенном состоянии с вероятностью, равной единице.
Если управляемый объект характеризуется одним показателем качества  и может находиться в и состояниях
и может находиться в и состояниях  с вероятностями
с вероятностями  , то сообщение Y о том, в каком из состояний находится объект в системе с полной информацией, будет содержать количество информации, равное его энтропии
, то сообщение Y о том, в каком из состояний находится объект в системе с полной информацией, будет содержать количество информации, равное его энтропии
Для оценки состояний объекта, характеризуемого т показателями качества  , требуется провести суммирование и по j, j=l,2,...,m.
, требуется провести суммирование и по j, j=l,2,...,m.
Энтропия H(Y) является мерой первоначальной неопределенности состояния объекта управления. Чем больше число различных состояний объекта и чем меньше отличаются друг от друга их вероятности, тем больше энтропия объекта управления. При n равновероятных состояниях pi = 1/n значение энтропии максимально:  .
.
С получением сведений об объекте управления неопределенность его состояния для управляющей системы уменьшается. Количество взаимной информации в сообщениях, предназначенных для уточнения состояния (уменьшения энтропии) объекта управления, определяют как разность:
I(Y, Y') = H(Y) - H(Y/Y'),
где H(Y/Y') - условная энтропия объекта после получения сообщения Y'.
Если полученное сообщение полностью характеризует состояние объекта, то оно полностью снимает неопределенность (H(Y/Y') = 0) и несет количество информации, равное H(Y).
|
|
|
Из теории информации также известно, что количество информации обладает двумя важными свойствами: положительностью и симметричностью. Первое свойство свидетельствует о том, что количество информации всегда больше или равно нулю ( ). Согласно второму свойству количество взаимной информации I(А, B), которое содержит принятое сообщение о посланном, равно количеству взаимной информации I(В, А), которое содержит посланное сообщение о принятом I(А, В) = 1(В, А).
). Согласно второму свойству количество взаимной информации I(А, B), которое содержит принятое сообщение о посланном, равно количеству взаимной информации I(В, А), которое содержит посланное сообщение о принятом I(А, В) = 1(В, А).
Указанные характеристики информации позволяют провести анализ управляющих воздействий относительно их соответствия состояниям управляемого объекта. Иначе, определить пределы управления.
Пусть существует система с управлением, в которой решается задача стабилизации - поддержание заданного состояния при случайных воздействиях внешней среды. Система описывается множеством возможных состояний объекта управления Y = { уi }, i = 1, 2, ..., п, и множеством возможных управляющих воздействий Х= {Xj},j = 1, 2,..., m.
Для определения пределов управления рассмотрим три возможных варианта:
· Отсутствие управления.
· Идеальное управление (управление с полной информацией).
· Реальное управление (управление с неполной информацией).
1. Отсутствие управления. Если управление отсутствует, то управляемый объект может принимать любое из состояний Y и характеризуется максимальной энтропией

2. Идеальное управление. Если управление идеальное, управляемый объект будет все время находиться в заданном состоянии с вероятностью, равной единице, и поэтому энтропия управляемого объекта равна нулю.
Проиллюстрируем это утверждение. Пусть для заданной системы при условии воздействий X вероятность первого состояния p(yl) = 1, а вероятности остальных состояний  .Следовательно,
.Следовательно,

3. Реальное управление. При управлении в реальных условиях имеют место отклонения состояния управляемого объекта относительно заданного. Это определяется тем, что управляющая система в общем случае подвержена внешним воздействиям, не обладает полной информацией о состоянии среды N и объекта управления Y (N' Ì N и Y' Ì Y). Это приводит к тому, что управляющие воздействия не полностью соответствуют требуемым воздействиям. В этом случае можно сделать вывод, что энтропия объекта управления в реальных условиях может изменяться в пределах 0<H(Y/X)<H(Y)max.
Качество управления может определяться количеством взаимной информации I(Х, Y) в управляющих воздействиях X относительно состояний управляемого объекта Y, вычисляемой как разность между безусловной и условной энтропией
|
|
|
H(Y)max -H(Y/X) = I(X,Y), (4.1)
что соответствует уменьшению энтропии управляемого объекта на величину, равную полученной информации.
С другой стороны, количество взаимной информации I(X, Y) в управляющих воздействиях X относительно состояний управляемого объекта Y может быть выражено как разность энтропии управляющей системы Н(Х) и условной энтропии управляющей системы после получения сообщения о состоянии управляемого объекта H(X/Y):
I(X,Y) = H(X) - H(X/Y). (4.2)
Подставив выражение (4.2) в правую часть выражения (4.1), получим
H(Y)max -H(Y/X) = H(X) - H(X/Y) (4.3)
После переноса H(Y)шах из левой части выражения (4.3) в правую часть и замены знаков получим
H(Y/X) = H(Y)max - H(X) + H(X/Y). (4.4)
Выражение (4.4), определяющее предельные возможности управления, показывает, что для повышения качества управления, т.е. уменьшения энтропии Н(Y/X), необходимо:
· уменьшать разнообразие состояний управляемого объекта H(Y);
· увеличивать разнообразие управляющих воздействий Н(Х), приближая его к разнообразию состояний управляемого объекта H(Y);
· уменьшать неоднозначность управляющих воздействий относительно состояний объекта управления H(X/Y), что возможно при наличии полной информации об управляемом объекте и внешней среде.
Иными словами, нужно стремиться к тому, чтобы на каждое возможное состояние управляемого объекта имелось свое управляющее воздействие, чтобы существовала возможность использования управляющих воздействий в зависимости от состояния и чтобы всякий раз обеспечивался выбор того воздействия, которое соответствует состоянию объекта управления. Выражение (4.4) отражает фундаментальный принцип кибернетики, известный как принцип необходимого разнообразия (принцип У. Росса Эшби) и формулируемый кратко так: «Разнообразие управляющей системы должно быть не меньше разнообразия объекта управления».
Согласно данному принципу с увеличением сложности объекта управления сложность управляющей системы должна увеличиваться. При управлении нужно располагать возможно более точной и полной информацией об управляемом объекте и внешней среде.
Из этого принципа следует, что энтропию объекта управления (многообразие состояний регулируемых переменных) можно понизить до желаемого уровня (что и является целью регулирования), только увеличив энтропию управляющей системы (многообразие регулирующих переменных) по меньшей мере до соответствующего минимума.
Принцип утверждает, что производительность любого физического устройства как регулятора не превышает его производительности как канала связи.
К сожалению, условная энтропия H(Y/X) не может считаться исчерпывающей характеристикой качества управления даже в теоретическом плане. Дело в том, что значение энтропии зависит лишь от распределения вероятностей, но не от самих значений случайной величины. Между тем довольно часто более важнысами значения случайных отклонений, а не их вероятности. Кроме того, возможности управления ограничиваются и некоторыми другими факторами, например временем обработки информации в управляющем объекте и передачи ее по каналам прямой и обратной связи.
4.2. МОДЕЛИ ОСНОВНЫХ ФУНКЦИЙ ОРГАНИЗАЦИОННО-ТЕХНИЧЕСКОГО УПРАВЛЕНИЯ
Управление заключается в преобразовании информации о состоянии объекта управления в командную информацию. Информация как любой объект обладает:
· содержанием;
· формой;
· пространственным расположением;
· временным расположением.
При таком рассмотрении управление может заключаться в преобразовании содержания (смысла) информации о состоянии объекта управления, в результате которого получают новую информацию; преобразовании формы, пространственного или временного расположения информации.
Проведем классификацию составных частей процесса управления с учетом того, что существует два принципа классификации: принцип разбиения и принцип покрытия.
Принцип разбиения состоит в том, что все исследуемое множество М разбивается на непересекающиеся подмножества М1, М2....,Мп, называемые классами эквивалентности, так, что

Принцип покрытия заключается в таком задании подмножеств Мi, что имеется хотя бы одна пара подмножеств Мi и Мj, в которой

Подмножества Мi в этом случае называются классами толерантности.
Классифицировать функции управления на основе принципа разбиения нецелесообразно, так как они связаны между собой и выполнение одной из них почти всегда ведет к одновременному выполнению других.
Поэтому, используя принцип покрытия, будем рассматривать процесс управления с учетом того, что он содержит множество функций преобразования информации, включающее три известных подмножества функций:
· { f 0} - подмножество функций, связанных с обменом информацией между ЛПР (передача сигналов оповещения, текстовой и графической информации, телефонные переговоры), и функция обмена данными;
· { f p} - подмножество рутинных функций управления (учет, хранение, поиск, отображение, обновление, редактирование, тиражирование текста и графики, разграничение доступа к информации);
· { f c} - подмножество функций преобразования содержания и формы представления информации (расчеты, решение логических задач для анализа состояния ОУ, при подготовке предложений для принятия решений, при разработке планирующих и распорядительных документов).
При этом процесс управления включает в себя функции всех подмножеств, но основным является подмножество { fc }, так как преобразования содержания обеспечивают порождение новой информации - решений по управлению.
4.2.1. СОДЕРЖАТЕЛЬНОЕ ОПИСАНИЕ ФУНКЦИЙ УПРАВЛЕНИЯ
Управление в организационно-технических системах можно представить как последовательность функций, составляющих технологический цикл управления.
Под функцией управления понимают устойчивую упорядоченную совокупность операций, основанную на разделении труда в управляющей системе.
Основоположником функционального подхода в управлении считается А. Файоль. Он выделил пять функций управления: предвидение, организация, распорядительская деятельность, координация (согласование) и контроль. Одновременно А. Файоль разделил все функции на шесть групп: производство, финансы, охрана, учет, администрирование, техника безопасности. В настоящее время к основным функциям управления относят:
· сбор данных;
· формирование сообщения;
· передачу данных по каналам связи;
· учет;
· контроль;
· анализ;
· прогнозирование;
· планирование;
· оперативное управление;
· организацию и координацию;
· доведение решений.
Для учета человеческого фактора в отдельную группу выделяют функции стимулирование и мотивация.
Рассмотрим определения и взаимосвязь основных функций в форме функциональной модели цикла управления (рис. 4.2).
Сбор данных - функция измерения характеристик yi,выполняемая в объекте управления вручную или автоматически. Модели процессов измерения изучаются в метрологии.
Формирование сообщения (запроса) - преобразование информации к виду, пригодному для передачи по каналам связи в управляющую систему и/или обработки в автоматизированном режиме. Модели функций формирования сообщений рассматриваются в теории информации, теории баз данных.

Передача данных по каналам связи - осуществляется разными способами, в том числе с использованием средств автоматизации. Главными требованиями к передаче данных являются: своевременность, достоверность и безопасность обмена информацией. Модели функций передачи данных рассматриваются в теории информации.
Учет - система функций, обеспечивающих хранение информации. Включает ввод-вывод, регистрацию, преобразование формы, поиск, отображение, тиражирование, классификацию, статистическую обработку, выборку, получение агрегированных данных, обеспечение конфиденциальности и целостности информации. Модели функций учета изучаются в теории баз данных.
Контроль - система функций, обеспечивающих определение состояния ОУ (измерение, сбор, уточнение данных об объекте управления) и оценку степени отклонения текущего состояния от требуемого по заданным критериям эффективности (оценку соответствия состояния системы требуемому).
С английского языка control переводится как управление и часто термин «контроль» используется вместо термина «управление». Это объясняется тем, что все функции управления включают элементы контроля. Мы будем выделять эту функцию, так как для ее автоматизации требуется формальная постановка задач наблюдения, классификации и идентификации состояния ОУ.
В зависимости от объекта контроля в эту функцию включают, например, измерение и оценку достоверности, точности, объема, своевременности представления данных, прохождения и исполнения документов; решение задач информационной безопасности.
Различают три вида контроля: предварительный, текущий и заключительный.
Предварительный контроль проводится до начала цикла управления для оценки ресурсов ОУ и внешних воздействий.
Текущий, или оперативный, контроль осуществляется на продолжении всего цикла управления в целях обнаружения отклонений от требуемого состояния.
Заключительный контроль предназначен для оценки степени достижения цели в конце цикла управления.
Функция анализа в общем случае зависит от его цели. Мы будем понимать под этой функцией средство, обеспечивающее объяснение причин отклонений состояния системы от требуемого и обоснование решения на переход к оперативному управлению или планированию. Например, пусть объект управления характеризуется параметром yi,который изменяется в пределах D yi. Если в результате анализа выяснено, что D yi £D yi доп , где D yi доп -допустимое отклонение, то в цикле управления осуществляется переход к оперативному управлению. Если D yi ³D yi доп, то осуществляется переход к функции планирования. Анализ часто в отдельную функцию не выделяется, а рассматривается совместно с контролем как составная часть других функций управления.
Функция прогнозирования - это средство снятия неопределенности относительно возможной структуры, свойств или закона функционирования системы в будущем. Типичными целями прогнозирования могут служить:
· замедление процесса «старения» принимаемых решений и предупреждение неблагоприятных ситуаций, в которых может оказаться организационно-техническая система. Решение по управлению, основанное на правильном прогнозе, не потребуется изменять в ближайшем будущем, т.е. один вопрос не потребуется решать дважды;
· повышение производительности системы с управлением, адаптация к изменяющимся условиям (предсказание ветвлений в суперскалярных микропроцессорах ЭВМ, предсказание будущих значений сигнала в системах связи).
Во всех случаях прогноз - это научно обоснованное суждение о возможных состояниях системы в будущем и/или об альтернативных путях и сроках достижения целевого состояния.
Прогноз позволяет получить совокупность возможных вариантов развития системы. Однако реализованные варианты зависят не от прогноза, а всегда определяются конкретными решениями, принимаемыми в системе управления, и имеющимися ресурсами. Так, оптимистический прогноз может не состояться, если ЛПР не предпринимает мер по его реализации. В свою очередь, правильные решения могут смягчить последствия пессимистического прогноза.
Прогнозы могут быть разделены на группы по периодам упреждения и по методам прогнозирования.
По периодам упреждения - промежутку времени, на который рассчитан прогноз, различают оперативные (текущие), кратко-, средне- и долгосрочные прогнозы. Оперативный прогноз, как правило, рассчитан на период времени, в течение которого объект управления существенно не изменяется, краткосрочный - на перспективу количественных изменений. Среднесрочный прогноз охватывает период времени, когда количественные изменения преобладают над качественными, долгосрочный - перспективу качественных изменений системы.
Функция планирования состоит в последовательном снятии неопределенности относительно требуемой структуры, свойств, закона функционирования системы или внешней среды. Включает задачу принятия решений по целеполаганию (ЗПРЦ) и задачу принятия решения по действиям (ЗПРД) - совокупность процедур по определению требуемого (целевого, оптимального) состояния системы и действий по достижению этого состояния, объединенных в единый процесс. Осуществляется при изменении условий функционирования ОУ: целей планирования, воздействий внешней среды, препятствующих оперативному управлению, и др.
В терминологии менеджмента ЗПРЦ называют стратегическим или перспективным планированием, а ЗПРД - тактическим или текущим планированием.
На стадии стратегического планирования рассматривается необходимость и возможность изменения структуры, свойств или закона функционирования системы.
Тактическое планирование заключается в принятии решения по выбору траектории перевода системы в новое состояние. При этом определяются действия ОУ, порядок использования ресурсов, решается задача оптимизации с учетом предполагаемых воздействий внешней среды. Детально прорабатываются средства и способы достижения целей, использования ресурсов, необходимые процедуры и технология. Характеристики системы считаются заданными и учитываются как ограничения.
Точную границу между стратегическим и тактическим планированием провести трудно. Обычно стратегическое планирование охватывает в несколько раз больший промежуток времени, чем тактическое; оно имеет гораздо более отдаленные последствия, шире влияет на функционирование управляемой системы в целом и использует более мощные ресурсы.
Оперативное управление обеспечивает функционирование системы в рамках действующего плана. Заключается в решении задач стабилизации, слежения или выполнения программы управления. Иногда в эту функцию включают задачу оптимизации. Планирование и оперативное управление являются задачами содержательной обработки информации.
Математические модели функций содержательной обработки информации разрабатываются с использованием теории принятия решений. Решения, принятые при планировании или оперативном управлении, учитываются в блоке учета и доводятся до объекта управления. После этого начинается новый цикл управления, в котором текущее состояние объекта управления сравнивается с требуемым, и в зависимости от величины отклонений управляемых характеристик D yi от допустимых отклонений D yi доп осуществляется переход к оперативному управлению или планированию.
Функция организации заключается в установлении постоянных и временных связей между всеми элементами системы, в определении порядка и условий их функционирования, в объединении компонентов и ресурсов системы таким образом, чтобы обеспечить эффективное достижение намеченных целей.
Функция организации выполняет:
· группировку функциональных элементов и ресурсов в организационные структуры;
· распределение степени ответственности ЛПР в иерархии подсистем управления.
Функция координации - это согласование действий подсистем в соответствии с целями системы с управлением и поддержание этого согласования на протяжении цикла управления. Наличие нескольких ОУ и подсистем управления приводит к противоречию между их частными целями. Это, в свою очередь, приводит к разобщенности действий. Устранение этих противоречий - основная задача координации. Функцию координации иногда рассматривают совместно с организацией в рамках задач оперативного управления или планирования.
Модели координации и организации разрабатываются в общей теории систем, в теории принятия решений, на основе теории расписаний, в частности, с использованием методов сетевого планирования и управления.
4.2.2. МОДЕЛЬ ОБЩЕЙ ЗАДАЧИ ПРИНЯТИЯ РЕШЕНИИ
Процесс принятия решений как функции преобразования содержания информации формализуется в терминах теории принятия решений. Центральными понятиями в теории принятия решений являются:
W - универсальное множество вариантов, альтернатив, планов, из которых осуществляется выбор;
X - предъявление, множество альтернатив, предъявленных для
выбора (X Í W);
Y - множество выбранных альтернатив, в частности одна (Y Í W)
С - принцип выбора (функция выбора), правило, по которому осуществляется выбор наилучшей альтернативы, Y = С(Х). Функция выбора может задаваться поэлементно или в виде графика какой-либо зависимости, или как целостное множество, удовлетворяющее некоторым условиям. Часто в задачах принятия решений используют понятие механизма выбора

Здесь d - совокупность сведений, позволяющая сопоставлять варианты или группы вариантов. Представляет собой структуру на множестве альтернатив. Задается в виде бинарных отношений, например, сходства, превосходства, несравнимости, отношений предпочтения, графа и другими способами;
p - правило выбора. Это инструкция, указывающая, как, используя структуру d, выделить из X подмножество Y.
В зависимости от степени формализации введенных понятий различают три типа задач принятия решений (табл. 4.1).
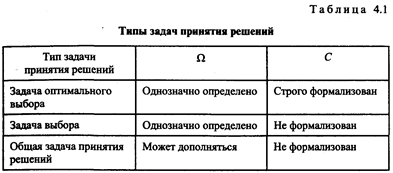
1. Задача оптимального выбора. Множество альтернатив {W}однозначно определено и принцип выбора С строго формализован. Для решения таких задач используются, например, аналитические методы, методы исследования операций, специальные методы оптимального выбора. Примером задач данного вида являются многокритериальные задачи оптимального управления.
Получаемые решения не зависят от субъективных мнений ЛПР, являются наилучшими из возможных для заданных условий, поэтому и называются оптимальными. Однако при изменении условий решение становится неоптимальным. Это ограничивает возможности приведения реальных задач к данному виду, поскольку учесть все факторы, влияющие на решение, в рамках данной задачи невозможно.
Так, первоначально при развитии ЭВМ прилагались значительные усилия для решения задач в экономике методами оптимизации. Однако более чем 30-летний опыт показал, что полученные результаты достаточно скромны. Эти методы, как правило, используются в технических системах, например в системах связи, реализующих оптимальный прием, оптимальное кодирование, оптимальное управление системой автоматической подстройки фазы, частоты сигналов.
2. Задача выбора. Множество альтернатив {W} однозначно определено, но принцип выбора С не может быть формализован. В этом случае выбор зависит от того, кто и на какой основе его делает. При решении таких задач обычно используются имитационное моделирование, методы экспертных оценок, теория полезности. Получаемые решения не могут считаться оптимальными. Но они признаются рациональными.
3. Общая задача принятия решений (ОЗПР). Множество альтернатив {W} может дополняться и видоизменяться, а принцип выбора С не формализован. В этом случае даже один и тот же человек может изменять свое решение при обнаружении новой альтернативы.
Такие задачи наиболее характерны для решения проблем в сложных системах. При этом под общей задачей принятия решения понимают ситуацию, когда требуется вначале сформировать множество альтернатив, затем из множества альтернативных решений выделить некоторое подмножество, в частном случае - одну альтернативу. Выбор альтернатив производится на основе представления ЛПР об их качестве, для чего требуется сформулировать принцип выбора.
Формально модель ОЗПР можно представить в следующем виде:

где Т - цель принятия решения (например, выбор альтернативы или упорядочение множества альтернатив);
I вх - исходные данные для порождения альтернатив;
I вых - множество порожденных альтернатив;
I m - выбранная альтернатива;
Р - правило порождения альтернатив;
С - правило выбора наилучшей альтернативы.
Исходные данные для порождения альтернатив и множество порожденных альтернатив для ОЗПР могут включать детерминированную, вероятностную и неопределенную информацию.
Правила порождения и выбора альтернатив могут быть представлены в форме аналитических, логических, эвристических решающих правил, в том числе как скалярные, векторные, составные критерии.
Графически структура ОЗПР представляется в виде последовательности правил порождения и выбора альтернатив, обеспечивающих преобразование исходных данных в решение (рис. 4.3).

ОЗПР относятся к слабоструктурированным задачам. В настоящее время для их решения интенсивно создаются методы обработки знаний (логико-лингвистического моделирования) в рамках новой научной дисциплины - инженерии знаний. Такие методы обеспечивают преобразование данных и вывод допустимых решений как в аналитической форме, так и в форме выражений естественного языка. При этом используются все известные теоретические модели представления: I вх, I вых, I реш, Р, С, а также неформализуемый опыт специалистов-практиков.
4.2.3. МОДЕЛЬ ФУНКЦИИ КОНТРОЛЯ
Задача контроля объекта управления включает решение трех частных задач: задачи наблюдения, классификации и идентификации (распознавания образов).
Решение задачи наблюдения заключается в отыскании такого отображения

которое каждой наблюдаемой реализации выходных характеристик Y ставит в однозначное соответствие внутреннее состояние ОУ Z. Это означает, что для контроля требуется обеспечить потенциальную наблюдаемость внутренних состояний ОУ по внешним признакам.
Решение задачи классификации состоит в отыскании такого отображения

которое обеспечивает разбиение всего множества возможных реализаций выходных характеристик Y на ограниченное число классов Е, обладающих теми или иными общими свойствами (видов агрегированных состояний ОУ). Определенные заранее такие агрегированные состояния играют роль своеобразных эталонов для распознавания реальных состояний объекта в процессе его контроля. В процессе анализа каждому классу состояний ставится в соответствие определенное решение по управлению объектом.
Решение задачи идентификации заключается в отыскании такого отображения

которое определяет оптимальную в некотором смысле оценку состояния ОУ S l по реализации входных х и выходных у сигналов объекта. Наблюдаемое реальное состояние объекта идентифицируется путем отождествления его с одним из заданных агрегированных состояний Е. Другими словами, задача идентификации состоит в нахождении методов, с помощью которых для каждого конкретного состояния S i требуется найти класс Е, к которому оно относится. Иногда эту задачу называют задачей распознавания образов.
Рассмотрим эти задачи более детально.
1. Решение задачи наблюдения. В самом общем виде модель функционирования любого объекта может быть представлена уравнением наблюдения и уравнением состояния системы:

В терминах общей теории систем операторы/ и g реализуют отображения

где T - множество.моментов времени, в которые наблюдается объект;
X и Y - множество входных и выходных сигналов соответственно;
Z - множество состояний объекта.
При этом всякое состояние объекта z(t) Î Z характеризуется в каждый момент времени t Î T Гнабором переменных zi. (i=l,..., k), изменяющихся под влияни
|
|
|
