 |


Особенности конструкции и характеристики реальных синхронных машин.
|
|
|
|
Простейшая модель синхронной машины.

По условиям практического удобства якорную обмотку чаще располагают на статоре, а полюса возбуждения на роторе. Простейшая модель такой машины может быть представлена, как на рис. 8.54. Она состоит из двухполюсного ротора 1 и расположенного на статоре 2 неподвижного витка 3.
Генераторный режим. При вращении полюсов ротора 1 на рис. 8.54 с угловой скоростью ω0 внешним источником механической мощности в направлении против часовой стрелки создается вращающееся относительно статора 2 магнитное поле и в замкнутом на внешний резистор витке наводится ЭДС е и течет ток iя, изменяющиеся с частотой
Если на статоре разместить второй виток, смещенный относительно первого в пространстве, например, на 90°, то в нем также будет наводиться ЭДС той же формы и частоты, но смещенная во времени относительно ЭДС первого витка на половину периода. Соответственно, если на статоре разместить три витка со взаимным пространственным сдвигом в 120°, можно получить систему трехфазных ЭДС. При взаимодействии потока возбуждения с токами статорной обмотки создается момент М, направленный встречно движению и уравновешивающий момент внешних сил.
Двигательный режим. В двигательном режиме неподвижная статорная обмотка должна создавать вращающееся магнитное поле. Для этого, как мы уже знаем, она должна быть многофазной, распределенной в пространстве и питаться многофазной системой токов. При этом для взаимодействия полей статора и ротора количество пар полюсов на них должно быть одинаково. Тогда к вращающимся со скоростью ω0 полюсам статора Nс и Sс притянутся соответствующие полюса ротора противоположной полярности Nр и Sр и будут вращаться вместе с ними с той же скоростью ω0 (например, как на рис. 8.55,а).
|
|
|

При отсутствии момента внешней нагрузки Мс оси полюсов ротора 1 и статора 2 совпадают и в идеале двигатель не развивает электромагнитного момента (реально развивает момент, покрывающий потери). Если же к валу двигателя приложен внешний момент Мс, под действием этого момента ротор отклоняется в сторону отставания по отношению к направлению движения на некоторый угол Θ. На полюса ротора действует электромагнитный момент М, направленный в сторону движения и стремящийся выравнить оси полюсов (рис. 8.55,б). Этот момент уравновешивает момент внешних сил Мс. Однако полюса ротора отставая от полюсов статора на угол Θ, при этом вращаются по-прежнему со скоростью ω0. Таким образом, в синхронной машине полюса ротора связаны с полюсами статора так называемой «магнитной пружиной», которая «сжимается» или «растягивается» в зависимости от нагрузки на валу. При этом средняя скорость вращения ротора всегда равна скорости вращения поля статора.
Особенности конструкции и характеристики реальных синхронных машин.
Синхронные электрические машины находят применение не только в качестве двигателей в электроприводе, но и широко используются также в качестве генераторов электрической энергии и компенсаторов реактивной энергии. Их мощность может достигать нескольких сотен тысяч киловатт. Синхронные двигатели (СД) традиционно находят применение в нерегулируемых электроприводах большой мощности (свыше 150 кВт). В настоящее время с развитием силовой преобразовательной техники все активнее применяются синхронные двигатели и в регулируемых электроприводах мощностью от нескольких ватт до сотен киловатт.
Конструкция статора синхронной машины принципиально не отличается от конструкции статора асинхронной машины. На шихтованном статоре в пазах располагается в общем случае многофазная (чаще трехфазная) обмотка, питаемая многофазной системой токов, в результате чего образуется вращающееся магнитное поле. По функциональному назначению обмотка статора является якорной обмоткой, т.е. в ней наводится ЭДС движения и посредством нее обеспечивается обмен энергией между сетью и машиной.
|
|
|
Конструкции роторов синхронных машин бывают явнополюсными и неявнополюсными. Ротор явнополюсных машин имеет выступающие полюса, аналогично тому, как это изображено в простейшей модели на рис. 8.54. Однако реальные конструкции явнополюсных роторов обычно имеют несколько пар полюсов (при питании от промышленной сети частотой 50 Гц число пар полюсов может достигать нескольких десятков) и, соответственно, вдвое большее число полюсных выступов.
Конструктивное исполнение ротора зависит также от способа создания потока возбуждения. Полюса на явнополюсном роторе могут быть созданы как постоянными магнитами, так и обмоткой возбуждения, поэтому различают, соответственно, машины с магнитоэлектрическим и электромагнитным возбуждением. Первые иногда называют бесконтактными синхронными машинами, т.к. в них отсутствуют скользящие контакты. Они не потребляют энергии на возбуждение и имеют повышенный КПД, более надежны в работе.
С освоением промышленностью высококоэрцитивных магнитотвердых материалов с большой магнитной энергией интерес к таким машинам неуклонно растет. Именно на их основе эффективно реализуются бесконтактные двигатели постоянного тока. Их недостатки связаны с относительно высокой стоимостью и с возрастающей сложностью крепления постоянных магнитов на роторе по мере роста скорости и выходной мощности, а также с невозможностью изменения потока возбуждения в процессе эксплуатации. В настоящее время их изготавливают на мощности от единиц ватт до нескольких киловатт.
Обычно явнополюсные роторы применяют также в крупных машинах с электромагнитным возбуждением при относительно низкой частоте вращения (от 1000 об/мин и менее). Полюса в принципе могут выполняться сплошными, поскольку в установившемся режиме работы магнитный поток неподвижен относительно ротора и не вызывает в нем потерь энергии. Однако, как правило, для снижения магнитных потерь в переходных режимах, а также по технологическим соображениям магнитопроводы роторов набираются из листов электротехнической стали толщиной 0,5 – 1 мм и стягиваются с помощью шпилек.
|
|
|
Обмотка возбуждения крупных машин для лучшего охлаждения наматывается из неизолированной полосовой меди, изолируемой между слоями специальными изоляционными прокладками. В полюсных наконечниках ротора размещается короткозамкнутая пусковая обмотка из проводникового материала с повышенным сопротивлением (например, из латуни). С помощью этой обмотки обеспечивается асинхронный пуск синхронного двигателя.
При высоких частотах вращения (3000, 1500 об/мин.) в крупных синхронных машинах обычно используют неявнополюсную конструкцию ротора, из-за возрастающей сложности обеспечения прочности крепления полюсных выступов и обмотки возбуждения на них с ростом скорости. Такие двигатели имеют цилиндрический ротор из массивной стальной поковки с пазами, в которые укладывается распределенная обмотка возбуждения.
Для получения кривой ЭДС, близкой по форме к синусоиде необходимо, чтобы кривая поля в воздушном зазоре была распределена по синусоидальному закону. В явнополюсных машинах для этого зазор между полюсами ротора и статором выполняют неодинаковым. Обычно под краями зазор принимают в 1.5 – 2 раза большим, чем под серединой. В неявнополюсных машинах улучшение формы поля достигается соответствующим неравномерным распределением пазов на роторе.
Кроме того, на роторе синхронных машин с электромагнитным возбуждением располагаются контактные кольца. С помощью колец и прилегающих к ним щеток роторная обмотка подключается к источнику постоянного напряжения.
Схема замещения фазы синхронного двигателя

Наиболее простой вид имеет схема замещения фазной обмотки статора неявнополюсной синхронной машины. Если пренебречь активным сопротивлением фазы, прикладываемое к фазе напряжение U1 уравновешивается лишь наводимой в ней ЭДС Е1. Поэтому схема замещения фазы может быть представлена только реактивным сопротивлением x1, обусловленным потоком рассеяния, как на рис. 8.56,а. Векторная диаграмма, соответствующая этой схеме, представлена на рис. 8.56,б.
|
|
|
Соотношение между входными электрическими и выходными механическими величинами можно получить приравняв потребляемую из сети активную мощность Р1=3U1I1cosφ и электромагнитную мощность Рэл= Мω0, т.е.

откуда получаем

Из векторной диаграммы на рис. 8.56,б следует соотношение:

а из вспомогательного треугольника АВС находим

С учетом (8.84) и (8.85) выражение (8.83) приобретает вид

Зависимость М(Θ), построенная по (8.86), показана на рис. 8.57 (кривая 1). Как видно, электромагнитный момент синхронной машины зависит от угла рассогласования между напряжением и наводимой ЭДС или, что тоже самое, от угла между осями полюсов статора и ротора Θ. Поэтому зависимость М(Θ) получила название угловой или моментной характеристики, а угол Θ, соответственно, называют углом нагрузки.
Максимального значения Мmax момент достигает, когда полюс ротора находится между полюсами статора, а угол нагрузки равен Θ = π/2. Это предельное значение момента нагрузки, при котором сохраняется синхронное вращение ротора. При превышении моментом нагрузки значения Мmax работоспособность двигателя нарушается, при этом обычно говорят, что двигатель выпадает из синхронизма. Таким образом, механическая характеристика синхронного двигателя представляет собой прямую, параллельную оси момента в пределах от - Мmax до Мmax (рис. 8.58).

| 
|
В явнополюсных машинах воздушный зазор между полюсами статора и ротора зависит от положения ротора, поэтому электромагнитный момент имеет две составляющих – активную и реактивную. Активная составляющая момента, определяемая по (8.86), обусловлена взаимодействием полей статора и ротора как и при неявнополюсном роторе. Реактивная составляющая (кривая 2 на рис. 8.57), обусловлена стремлением ротора занять положение, при котором магнитная проницаемость для пути замыкания потока максимальна (соосное положение полюсов статора и ротора). Она изменяется с удвоенной частотой относительно активной составляющей момента. При номинальном возбуждении амплитуда реактивной составляющей момента обычно составляет 20-30% от амплитуды первой составляющей момента. Поэтому результирующая угловая характеристика явнополюсной машины имеет вид кривой 3 на рис. 8.57.
Важным достоинством синхронных двигателей с электромагнитным возбуждением является возможность регулирования потребляемого из сети реактивного тока за счет соответствующего изменения тока возбуждения. Это можно пояснить с помощью векторных диаграмм для трех характерных значений тока возбуждения, показанных на рис. 8.59 а, б, в. но при одинаковой выходной мощности двигателя (при одном и том же значении момента или активной составляющей тока статора).
|
|
|

В недовозбужденной машине (рис. 8.59,а) вектор тока I1 отстает от вектора напряжения U1 на некоторый угол φ. В этом случае иногда говорят, что машина работает с отстающим коэффициентом мощности cosφ (реактивная мощность потребляется из сети). С увеличением тока возбуждения растет наводимая в обмотках статора ЭДС Е1 и при некотором ее значении вектор тока I1 может совпасть по направлению с вектором напряжения U1 (рис. 8.59,б). В этом случае машина потребляет из сети только активную составляющую тока I1 и cosφ = 1. Это наиболее благоприятный режим работы синхронной машины, т.к. при минимальном потребляемом токе потери, выделяемые в ней, также будут минимальными.
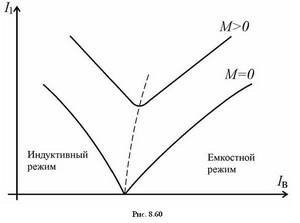
В перевозбужденной машине, как показано на рис. 8.59,в (при дальнейшем увеличении тока возбуждения) и, соответственно, при дальнейшем возрастании ЭДС Е1, ток статора I1 начинает уже опережать по фазе напряжение U1. В результате cosφ становится опережающим и синхронный двигатель, потребляя из сети активный ток, является источником реактивного тока. Зависимость тока статора I1 от тока возбуждения Iв в функции развиваемого момента М имеет примерно вид, как показано на рис. 8.60. Минимуму тока на этих зависимостях, которые в соответствии со своим видом получили название U-образных характеристик синхронного двигателя, соответствует работа при cosφ = 1.
|
|
|
