 |


Общие сведения о радиолокации и биорадиолокации
|
|
|
|
Понятие о радиолокации биологических объектов
Нашей задачей является изучение методов и устройств биорадиолокации. Приступая к освоению новой предметной области, необходимо, прежде всего, ознакомиться с основными понятиями, составить представление об изучаемом предмете в общих чертах. Необходимо усвоить терминологию, понять взаимосвязь разных отдельных составных частей общего знания, разобраться в переплетении и взаимосвязи основных проблем. Безусловно, нам придется рассмотреть основы теории классической радиолокации, поскольку раньше при обучении вы эти вопросы не изучали.
Радиолокацией называют область техники, охватывающую методы и средства обнаружения, определения координат и параметров движения различных объектов с помощью отражения, переизлучения или излучения ими радиоволн [1,2]. Традиционными объектами локации до недавнего времени являлись в основном неживые объекты (цели), что определялось спецификой использования радиолокационных устройств. К областям применения традиционной радиолокации можно отнести обнаружение и определение координат, а также параметров перемещения:
- аэродинамических целей (самолеты, крылатые ракеты и т.д.);
- баллистических и космических объектов (боеголовки и спутники);
- наземных и надводных объектов (наземные транспортные средства и боевые машины, корабли).
Другим направлением радиолокации, бурно развивающимся в последние десятилетия, является подповерхностная радиолокация. Ее назначением является зондирование конденсированных сред, характеризующихся высоким поглощением и дисперсией электромагнитных волн [3]. Термин «конденсированная» означает твердую или жидкую фазу как противоположность случаю газовой фазы. Подповерхностная радиолокация характеризуется разнообразными применениями, перечислим некоторые их них:
|
|
|
- зондирование грунтов с целью выявления их глубинной структуры и неоднородностей (уровня грунтовых вод, различного рода природных включений, расположения и состояния технических конструкций и коммуникаций);
- обследование местности с целью обнаружения взрывоопасных предметов, например, мин;
- зондирование строительных конструкций для выявления их внутренней структуры, например, мест залегания деталей арматуры, строительных дефектов;
- неразрушающий контроль промышленных изделий.
Интенсивно развивающимся направлением радиоэлектроники является радиолокация биологических объектов. Использование радиолокаторов для обнаружения живых людей, находящихся за преградами, и дистанционное определение параметров их дыхания и сердцебиения находит применение в различных областях: спасательных операциях, антитеррористической борьбе, медицине и других.
Метод дистанционного обнаружения и диагностики людей, в том числе за оптически непрозрачными препятствиями, основанный на модуляции радиолокационного сигнала колебательными движениями и перемещениями частей тела и органов человека, будем называть биорадиолокацией [4]. Исследования в области биорадиолокации в нашей стране и за рубежом направлены на решение ряда теоретических задач радиолокации биологических объектов, а также на создание новых типов аппаратуры.
Общие сведения о радиолокации и биорадиолокации
Радиолокация является частью радиоэлектроники. Радиоэлектронное средство (устройство, система, комплекс) - изделие и/или его составные части, в основу функционирования которых положены принципы радиотехники и электроники [1,2]. Возникновение понятия «радиоэлектронное средство», так же, как и понятия «радиоэлектроника» связано с тем, что, несмотря на существование двух различных областей знаний (радиотехника и электроника), их реализация в технических средствах обычно происходит совместно, неразрывно, образуя единые комплексные принципы действия.
|
|
|
Радиоэлектронной системой называют совокупность средств и приборов, среди которых радиотехнические выполняют основные или одну из основных функций преобразования информации. Такими функциями могут быть:
- передача информации, например, научной или технической, - это радиосистемы связи;
- разрушение информации, т. е. создание помех для передачи и извлечения информации – это системы радиопротиводействия;
- получение информации о собственных координатах в пространстве – это радионавигационные системы;
- извлечение информации о координатах удаленного объекта – радиолокационные системы;
- управление движущимися объектами по радиоканалу – радиосистемы управления.
1.1.1.Физические основы радиолокации
Радиолокация как наука основана на использовании ряда физических законов, связанных с распространением и рассеянием электромагнитных волн.
1. Радиоволны распространяются в свободном пространстве со скоростью света с=3·106 м/с.
В современной радиолокации используются ультракороткие волны (УКВ): метровые, дециметровые, сантиметровые, реже миллиметровые радиоволны. Использование в РЛС сверхвысоких частот (ультракоротких волн) объясняется в основном требованием создания остронаправленного излучения, а кроме того, интенсивность отражения ЭМВ получается достаточной лишь в том случае, если длина волны зондирующего сигнала меньше геометрических размеров облучаемого объекта.
Технические особенности той или иной радиолокационной станции (РЛС) обусловлены диапазоном волн, способами получения зондирующего радиосигнала, методами обработки отраженного радиосигнала и особенностями работы оконечного устройства.
В таблице 1.1 приведено принятое деление диапазона УКВ для радиолокации. В США и Англии диапазоны несколько иные [1]. Вспомним, что 1 ГГц = 109 Гц, 1 МГц = 106 Гц, 1 Гц = 1 с-1.
Таблица 1.1.
Диапазоны радиоволн
| Диапазон волн | Длина волны | Частота, МГц |
| Метровый | 10 м – 1 м | 30 - 300 |
| Дециметровый | 1 м – 10 см | 300 - 3000 |
| Сантиметровый | 10 см – 1 см | 3000 – 30000 |
| Миллиметровый | 1 см – 1 мм | 30000 – 300000 |
|
|
|
При распространении в тропосфере[1] радиоволны сантиметрового и более коротковолновых диапазонов испытывает затухание, связанное с частичным преобразованием электромагнитной энергии в другие виды энергии и с рассеянием. Миллиметровые волны испытывают добавочное поглощение в молекулах водяного пара и кислорода. Поэтому радиоволны этих диапазонов не применяют для радиолокаторов дальнего действия. Затухание резко уменьшается с увеличением длины волны и становится ничтожно малым для волн длиннее 10 см.
2. Важнейшим для радиолокации свойством электромагнитных волн является их рассеяние (отражение) при падении на объекты. Это позволяет, принимая отраженные объектом волны и измеряя их параметры, судить о наличии и свойствах объекта. В общем случае объект рассеивает волны во все стороны, в том числе и в сторону, обратную направлению прихода падающей волны. Таким образом, облучая объект, можно принимать отраженную волну в том же месте, откуда она излучалась. Такой тип радиолокации называется первичной или радиолокацией с пассивным ответом.
3. Закон о прямолинейности распространения электромагнитных волн в однородной среде используется для определения угловых координат объекта. Для создания остронаправленного излучения или приема необходимо, чтобы длина волны была меньше геометрических размеров антенны. Чем меньше длина волны по сравнению с размерами антенны, тем уже может быть радиолуч, тем точнее можно определить направление на объект и тем выше будет разрешающая способность РЛС по угловым координатам (минимальное угловое расстояние, когда два объекта различаются отдельно). Отсюда тенденция к использованию все более коротких волн.
4. Постоянство скорости распространения электромагнитных волн позволяет определять дальность до объекта D путем измерения задержки tз волны при ее распространении от радиолокатора до объекта и от объекта до радиолокатора при отражении. В этом примере радиоволна проходит свой путь дважды, отсюда в формуле деление на два.
|
|
|
 . (1.1)
. (1.1)
5. Электромагнитные волны, рассеянные движущимся объектом, имеют другую длину волны по сравнению с волной облучения (доплеровское смещение частоты). Этот эффект позволяет выделять движущиеся объекты и определять их скорость путем измерения величины смещения частоты. Несущая частота сигнала f 0 изменится на величину доплеровского смещения FД = (2 Vr / c) f 0, следовательно, радиальная скорость
 (1.2)
(1.2)
6. Одной из наиболее важных проблем радиообнаружения объектов локации является отыскание оптимальных способов выделения сигналов при наличии помех. Помехи, искажающие полезный сигнал от объекта, подразделяются на аддитивные и мультипликативные (модулирующие).
Аддитивной помехой n(t) называется такая помеха, которая входит в смесь x(t) сигнала u(t) с помехой в качестве слагаемого
x(t) = u(t) + n(t).
Наиболее важной аддитивной помехой является собственный шум приемного устройства (ПРМ), всегда присутствующий на его входе. Такой шум является случайной функцией времени и его можно считать стационарным случайным процессом. Собственный шум ПРМ обладает равномерным энергетическим спектром во всем диапазоне частот от 0 до бесконечности. Такой шум называют «белым». На каждый герц полосы частот приходится плотность мощности N0 = kT [Вт/Гц], где k = 1,3803·10-23 [Дж/К] — постоянная Больцмана; T — температура в градусах Кельвина. На рис.1.1 показаны чистая синусоида и ее спектр, «белый» шум и его спектр.
Активные и пассивные источники помех являются объектами, которые излучают или переизлучают сигналы, мешающие обнаружению сигналов цели. Помехи обычно используются в процессе радиоэлектронной борьбы (тогда их называют активными), однако они могут быть и непреднамеренными (естественными), например, в виде излучения других радиопередающих устройств. Искусственно созданные пассивные помехи возникают из-за отражения от специальных отражателей (облака диполей, аэрозолей и других образований), отражения от которых маскируют сигналы целей.
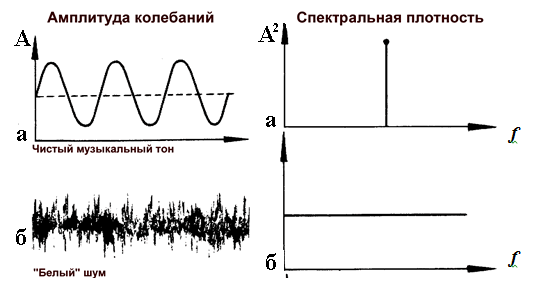
Рис.1.1. Гармонический сигнал (а) и «белый шум» (б) 
Обобщенная схема РЛС
На рис. 1.2 показана обобщенная схема радиолокационной станции. Она включает в себя собственно РЛС (3), носитель РЛС (6), среду распространения радиоволн (2), группу лоцируемых объектов (1), систему навигации (4) и систему индикации и управления каналом (5). Все эти элементы структуры участвуют в процессе обнаружения и определения характеристик заданных объектов. Рассмотрим рисунок, поясняя содержимое каждого из квадратов, обозначенных цифрами на схеме.
|
|
|
1. Радиолокационные объекты. Радиолокационными объектами являются цели, фон, различные ориентиры, источники помех.
2. Среда распространения радиоволн – пространство между РЛС и объектом. Обычно считается, что электромагнитная волна от объекта до РЛС распространяется прямолинейно и с постоянной скоростью. Наличие неоднородности среды (коэффициента преломления) вносит ошибки в процесс измерения характеристик цели, а потери энергии вследствие поглощения в среде приводят к уменьшению дальности обнаружения целей. Поэтому при решении радиолокационных задач требуется учитывать характеристики среды распространения.

Рис.1.1. Структура радиолокационного канала
3. РЛС – включает в себя собственно аппаратуру РЛС («железо») и программное обеспечение (ПО) работы РЛС. Аппаратура РЛС включает в себя следующие основные блоки:
- антенные и приемо-передающие модули. Антенно-фидерные устройства модулей обеспечивают направленное излучение и прием радиоволн с учетом их поляризации. Передающие модули обеспечивают усиление, амплитудную и фазовую модуляцию радиочастотных колебаний. Приемные модули обеспечивают малошумящее усиление и преобразование частоты принимаемых радиочастотных колебаний;
- синтезатор сигналов, который генерирует колебания заданной радиочастоты, частот модуляции и преобразования для приемопередающих модулей;
- процессор обработки сигналов, выполняющий с помощью аналоговых и цифровых устройств заданный алгоритм обработки принимаемых колебаний (синтезирования апертуры);
- БЦВМ управления и обработки данных обеспечивает согласование работы и режимов всех устройств РЛС и носителя РЛС в соответствии с решаемой задачей, а также обработку данных с выхода сигнального процессора.
Кроме перечисленных составных частей, в РЛС также входят устройства технической диагностики, источники питания, сеть распределения сигналов и коммутационные устройства (на рисунке не показаны).
4. Система навигации снабжает необходимой информацией системы обработки сигналов управления.
5. Система индикации и управления обеспечивает связь между оператором и РЛС с использованием устройств отображения информации интеллектуальных систем управления, реализуемых с помощью ЭВМ.
6. Носитель РЛС выполняет не только транспортные функции, но и обеспечивает заданное пространственное положение РЛС (траекторию), исходя из задачи формирования требуемого пространственно-временного траекторного сигнала.
Функционирование радиолокационного канала начинается с задания оператором тактической задачи, исходя из которой, система управления через БЦВМ управления формирует структуру канала и его режимы работы. Коммутационные устройства обеспечивают реконфигурацию (изменение структуры) РЛС путем переключения приемопередающих модулей и вычислительных модулей процессоров и изменения способов объединения сигналов и данных с помощью сети распределения (шины), соединяющей все модули. Кроме того, система управления изменяет состав модулей программного обеспечения процессоров и БЦВМ для выполнения заданных алгоритмов управления, обработки сигналов и индикации. Сложные задачи реконфигурации аппаратуры РЛС и программного обеспечения требуют большой интеллектуальной поддержки оператора РЛС соответствующим программным обеспечением ЭВМ системы управления, которое высвобождает мышление оператора (летчика) для решения тактических задач.
В соответствии с заданным режимом работы синтезатор сигналов вырабатывает высокочастотные колебания несущей частоты зондирующего сигнала в зависимости от решаемых РЛС задач, а также частоты преобразования и модуляции сигналов.
Излученная электромагнитная волна, пройдя среду распространения от РЛС до объекта, формирует поле облучения объекта. В зависимости от свойств объекта и параметров поля облучения, характеризуемых функцией отражения объекта, формируется рассеянная объектом электромагнитная волна (ЭМВ), распространяющаяся в сторону РЛС.
Отраженная от объекта ЭМВ, пройдя среду распространения от объекта до РЛС, возбуждает поле на апертуре приемных антенных модулей.
Процессор обработки сигналов и БЦВМ выполняют заданные алгоритмы синтезирования апертуры, обнаружения, определения координат и распознавания цели, обеспечения помехозащищенности и другие алгоритмы. Полученные данные используются оператором и подаются в другие системы (разведка, оружие, оборона и т. п.).
Дополнительные каналы (обычно другой физической природы) обеспечивают необходимой информацией процессоры обработки и БЦВМ управления. Это, прежде всего, система навигации, которая совместно с носителем обеспечивает требуемую траекторию перемещения антенных модулей РЛС, исходя из необходимости решения заданной тактической задачи. Так, при использовании РЛС в качестве информационной системы для наведения носителя РЛС на малоразмерную наземную цель управление траекторией предусматривает получение высокой разрешающей способности и выдерживание заданного вектора путевой скорости относительно объекта.
Методы радиолокации
Зондирующее излучение становится информационным сигналом только после взаимодействия с целью (отраженный сигнал, ответный сигнал). Рассмотрим принятую классификацию методов радиолокации по способу образования радиолокационных сигналов: активная радиолокация, полуактивная и пассивная [1,2].
При активной радиолокации (рис. 1.3, а) радиоволны (РВ), излучаемые антенной передающего устройства РЛС, фокусируются и направляются на цель. Приемное устройство той же РЛС принимает отраженные волны и преобразует их так, что выходное устройство с помощью опорных сигналов (см. пунктирную стрелку между передатчиком и выходным устройством) извлекает содержащуюся в отраженном сигнале информацию: наличие цели, ее дальность, направление, скорость и др. Этот метод радиолокации называется активным потому, что предусматривает облучение цели антенной РЛС. Опорные сигналы являются необходимым элементом, обеспечивающим радиолокационные измерения, задаются прямой излучаемой волной и несут информацию о зондирующем излучении (несущей частоте, фазе, времени появления, об исходном направлении луча антенны и др.).
При активной радиолокации с активным ответом (рис. 1.3, б) предполагается наличие на объекте ответчика (ретранслятора), который состоит из приемного устройства, предназначенного для приема и усиления


Рис.1.3. Упрощенные схемы формирования радиолокационных сигналов: а – при активной локации с пассивным ответом; б – при активной локации с активным ответом; в – при пассивной локации; г – при полуактивной локации
прямого сигнала, поступающего от РЛС – запросчика, и передающего устройства — для создания ответного сигнала (переизлучения).
При пассивной радиолокации сама цель является источником электромагнитного излучения, а РЛС выполняет функции приемного устройства, предназначенного для определения направления на этот источник (рис. 1.3, в). Собственное излучение создается нагретыми частями объекта, ионизированной атмосферой, окружающей объект, и, наконец, радиопередающим устройством, которое может оказаться на данном объекте.
Пассивную радиолокацию, использующую для изучения объектов их собственное естественное излучение называют теплорадиолокация, а при использовании радиоизлучения работающего передатчика – радиометрией.
Разнесенная радиолокационная система — разновидность радиолокации по пассивным целям. Ее характерная черта: передающее и приемное устройства разнесены на значительное расстояние. На рис. 1.3, г показана функциональная схема разнесенной системы активной радиолокации, в которой передающее устройство принадлежит наземной станции, а приемные устройства — управляемому снаряду. Одно из них (I) предназначено для приема отраженных от цели сигналов, а другое (II) — для приема от передатчика опорных сигналов. Выходное устройство, используя эти сигналы, вырабатывает команды наведения снаряда на цель.
Возможна разнесенная система пассивной радиолокации, где цель не облучается со стороны РЛС, а наоборот, сама излучает волны с помощью имеющегося на ней специального передатчика — маяка. РЛС при этом только принимает и обрабатывает эти сигналы. Как видно, в обоих вариантах системы та ее часть, где производятся радиолокационные измерения, в облучении цели не участвует. Поэтому разнесенную систему относят к полуактивной радиолокации.
Активная радиолокация в отличие от пассивной позволяет определять все координаты цели (не только направление на нее). Преимущество пассивной системы — скрытый характер локации (со стороны РЛС нет излучения). Полуактивную радиолокацию целесообразно применять в РЛС управления ЛА, где возможность уменьшить вес и габариты бортовой аппаратуры за счет исключения из нее передающей части РЛС особенно важна. Передатчик вместо этого устанавливают на пункте управления.
При активной радиолокации с активным ответом запросный и ответный сигналы кодируются, чтобы по коду можно было определить государственную принадлежность цели («свой — чужой») и получить дополнительную информацию. Такой метод радиолокации весьма эффективен и как средство навигации. Например, если запросный сигнал посылается с самолета или морского корабля, а ответчиком служит наземный передатчик — радиомаяк, то последний служит хорошим навигационным ориентиром для штурмана корабля или самолета. Третье важное преимущество систем с активным ответом — выигрыш в дальности действия, обусловленный значительно большей мощностью ответного сигнала по сравнению с отраженным от цели. Однако ответную аппаратуру можно установить только на «своем» объекте. Поэтому наибольшее применение получила активная радиолокация по пассивным целям (рис. 1.3, а), которую для краткости будем называть активной.
Таким образом, по принципам образования радиолокационных сигналов методы радиолокации разделяются на активные, полуактивные и пассивные. На практике часто их совмещают при проектировании радиолокационных систем.
Биорадиолокация
В последнее время появился новый термин – биорадиолокация. Биорадиолокацией авторы этого нового направления называют метод дистанционного обнаружения и диагностики людей или животных, в том числе за оптически непрозрачными препятствиями, основанный на модуляции радиолокационного сигнала колебательными движениями и перемещениями органов биологического объекта [4].
Первопричиной наличия биометрической информации в отраженном радиосигнале являются сокращения сердца, сосудов, легких и других внутренних органов человека, а также артикуляция (одновременная работа активных произносительных органов: голосовых связок, языка, губ, небной занавески). Эти процессы носят квазипериодический характер и вызывают модуляцию отраженного радиолокационного сигнала. Можно выделить четыре группы биомеханических движений, которые отличаются как по частотному диапазону, так и по амплитуде. К ним относятся:
- сокращения сердечной мышцы (частоты в диапазоне 0.8 - 2.5 Гц, амплитуды колебаний на грудной клетке 1- 0.1 мм);пульсациями сердца и крупных поверхностно залегающих артерий (характерные частоты 0,7-1,5 Гц);
- колебания грудной клетки человека при дыхании (частоты в диапазоне 0.2 - 0.5 Гц, амплитуды колебаний грудной клетки в зависимости от типа дыхания 0.5-1.5 см);
- движение органов речи человека (частота основного тона колебаний голосовых связок около 100 Гц);
- движение других частей тела человека (рук, ног и т.д.).
Конкретные значения этих частот и амплитуд перемещений определяются физической активностью и состоянием испытуемого. Наиболее сложным представляются процессы артикуляции, т.к. в них участвуют сразу несколько различных органов тела человека, обладающих своими собственными характеристиками.
По имеющимся в литературе данным, чувствительность радиочастотного зондирования к величине перемещения обнаруживаемого объекта в гигагерцовом диапазоне волн потенциально может достигать 10-9 м.
Величины регистрируемых перемещений определяют использование в биорадиолокаторах электромагнитных волн сверхвысокочастотного диапазона, а в качестве зондирующих могут использоваться как импульсные сигналы так и непрерывные с линейной или ступенчатой частотной модуляцией, а также монохроматические. При обнаружении человека как живого объекта задача наиболее просто решается с помощью радиолокаторов малой дальности, работающих с непрерывными немодулированными сигналами в частотном диапазоне 1 - 10 ГГц [4].
В качестве задач, где применение биорадиолокации может быть перспективным, укажем следующие:
- обнаружение людей, находящихся под завалами в результате землетрясений, техногенных катастроф, схода лавин. Актуальность задачи определяется необходимостью для спасателей приступить к скорейшей разборке завалов в местах, где есть надежда обнаружить живых людей;
- антитеррористические операции, а также при ведении боя в условиях города для обнаружения и слежения за людьми, находящимися за непрозрачными препятствиями, такими как стены или междуэтажные перекрытия, и в условиях плохой видимости;
- дистанционное обнаружение раненых при боевых действиях по их дыханию (у погибших дыхание отсутствует) для снижения риска медицинского персонала при эвакуации под огнем противника;
- дистанционное обнаружение скрытого под одеждой человека огнестрельного или холодного оружия;
- контроль охраняемых территорий от вторжения посторонних лиц;
- при досмотре транспортных контейнеров с целью выявления лиц, нелегально пересекающих границу;
- дистанционное определение эмоционального состояния человека с целью выявления потенциально опасных лиц, например, при предпосадочном досмотре в аэропортах;
- разработка дистанционного детектора лжи;
- контроль состояния оператора сложных машинных комплексов;
- регистрация речевых сигналов человека за препятствиями без использования традиционных акустических микрофонов;
- мониторинг пульса и дыхания пациента, в случае, когда применение контактных сенсоров невозможно или затруднено;
- слежение за состоянием и диагностика внутренних органов человека;
- дистанционное слежение за состоянием плода в период беременности вместо существующих мониторов, использующих ультразвук с контактными датчиками;
- измерение эластичности кровеносных сосудов путем измерения скорости распространения импульса кровяного давления при сердечном сокращении, что поможет определить предрасположенность пациента к сердечно-сосудистым заболеваниям.
Наиболее перспективной областью применения биорадиолокации в медицине сейчас является сомнология (исследование расстройств дыхания во время сна). Многочисленные работы в области сомнологии относятся к исследованию патологических ночных остановок дыхания. Такие нарушения очень распространены (ими страдают от 3 до 8 % населения) и оказывают существенное влияние на здоровье и качество жизни пациентов. Мужчины страдают этим расстройством чаще женщин в 3-8 раз.


Рис.1.4. Примеры медицинского применения биорадиолокации
Диагностика нарушений дыхания во время сна традиционно проводится чрезвычайно трудоемким и дорогостоящим полисомнологическим методом в лабораториях сна, располагающих соответствующим диагностическим оборудованием.
Этот метод требует длительной регистрации различных функций человеческого организма в период ночного сна. Как правило, регистрируются следующие сигналы: дыхание, шум дыхания (храп), дыхательные движения грудной клетки и брюшной стенки, поток выдыхаемого воздуха изо рта и ноздрей, положение тела, движение нижних конечностей, насыщение артериальной крови кислородом, электроэнцефалограмма, электрокардиограмма, электроокулограмма, электромиограмма и др.
Бесконтактный дистанционный мониторинг движений, дыхания и частоты сердечных сокращений (ЧСС) биорадиолокационным методом является важным дополнением к полисомнологическим исследованиям, позволяя повысить комфортабельность проводимых ночных исследований для пациента, стабильность регистрируемых данных.
Дистанционная регистрация движений, дыхания и ЧСС даст возможность проводить профилактические обследования населения для выявления дыхательных расстройств и нарушений сна, бесконтактный мониторинг нарушений дыхания и сна у детей, в том числе для предотвращения синдрома внезапной смерти у младенцев. Диагностика сна может быть использована для создания «умного будильника», определяющего фазы сна и момент, наиболее подходящий для пробуждения.
Одним и возможных приложений дистанционного измерения параметров дыхания и ЧСС является создание дистанционного «детектора лжи». Достоинством биорадиолокации в этом случае является возможность скрытного измерения параметров человека и оценка на их основе его психоэмоционального состояния. Это не позволит испытуемому принять меры по модификации своей реакции на задаваемые вопросы в ходе беседы, что вполне возможно в случае применения традиционного полиграфа. Кроме того, скрытное наблюдение и регистрация параметров человека не потребует специального разрешения или согласия, как в случае контактных измерений.
Для определения тематики разделов при дальнейшем изучении дисциплины остановимся на состоянии уровня техники в области биорадиолокации. В книге [4] приведен обзор разработок в области биорадиолокации. В простейшем случае биорадиолокатор может излучать непрерывный монохроматический сигнал.В описываемых зарубежных и отечественных радиолокационных системах применяются различные методы модуляции непрерывного радиолокационного сигнала: линейная частотная модуляция, ступенчатая модуляция, когда частота излучаемого сигнала изменяется по ступенчатому закону, импульсные системы, при которых длительность импульса может достигать 10-7c или, может быть, даже короче.
Биорадиолокаторы с очень короткими импульсами – сверхширокополосные РЛС ближнего радиуса действия (СШП РЛС) с доплеровской обработкой сигналов наиболее перспективны для использования в перечисленных на стр.16,17 областях. Такие РЛС находят самое широкое применение в тех областях человеческой деятельности, где требуется высокая точность дистанционного наблюдения за движущимися объектами на небольших расстояниях. Одной из таких областей является медицина, где применение СШП РЛС для дистанционного измерения параметров сердечной и дыхательной деятельности человека позволяет в клиниках или ожоговых центрах вести круглосуточный бесконтактный контроль состояния пациентов, а в домашних условиях - осуществлять самостоятельную периодическую проверку параметров организма с последующей передачей полученных данных по телефонным сетям в центры контроля жизнедеятельности для диагностики и принятия необходимых мер.
Определенный интерес представляют и пассивные радиолокационные системы, которые работают, как правило, в миллиметровом диапазоне длин волн. К их преимуществам относится отсутствие собственного излучения. С другой стороны, миллиметровые волны относительно легко поглощаются даже во влажной одежде, что в значительной степени сдерживает применение этого метода.
При обнаружении людей за стенами и на местности используется сантиметровый диапазон длин волн.
Известен целый ряд зарубежных радаров для обнаружения людей, выпускающихся серийно [4]. Это радары Prism 200 (Англия), MIR (США), Xaver™ 800 (Израиль), TWS (Канада), Radar Scope (США), Rescue Radar LS-RR01 (Япония) и другие (см. таблицу 1.2). Внешний вид радаров показан на рис. 1.5. Это компактное переносимой устройство с встроенным дисплеем для оперативного отображения информации.
В России серийные радары такого типа пока не выпускаются.

Рис. 1.5. Внешний вид радаров для обнаружения людей за непрозрачными препятствиями
Работы по созданию подобных устройств ведутся рядом организаций, среди которых СКБ ИРЭ РАН, МАИ, МГТУ им. Н.Э.Баумана, и др.
Таблица 1.2.
|
|
|
