 |


Электрическое регулирование частоты вращения механизмов СН
|
|
|
|
Плавное изменение частоты вращения насосных и вентиляторных установок позволяет снизить потери электроэнергии в технологических комплексах СН ТЭС и повысить эффективность топливоиспользования.
На практике широко используются три способа регулирования механизмов СН ТЭС, участвующих в технологическом цикле производства электроэнергии и тепла [3].
На сегодняшний день расход электроэнергии на собственные нужды превышает 10 %, хотя должен не превышать и 5–7 % от общей вырабатываемой электроэнергии. Основной причиной неэкономичных режимов работы механизмов собственных нужд и потерь топлива и электроэнергии являются переменные нагрузки ТЭС. Вследствие переменных режимов большинства энергоблоков ухудшается надежность эксплуатации и экономичность, как основного тепломеханического оборудования, так и механизмов системы собственных нужд — многочисленных насосных и вентиляторных установок и их приводных асинхронных двигателей. Частые пуски и остановы энергоблоков, изменения их нагрузок сопровождаются потерями из-за неоптимальных режимов работы основного оборудования и механизмов системы собственных нужд, вследствие необходимости дросселирования теплоносителей (пара, воды, воздуха, газов). Частотно-регулируемый электропривод — это один из эффективных инструментов улучшения энергопотребления и снижения издержек при производстве и отпуске электрической и тепловой энергии, повышения надежности эксплуатации. В состав частотно-регулируемого электропривода входят стандартный или специальный асинхронный или синхронный электродвигатель, транзисторный или тиристорный преобразователь частоты, согласующий трансформатор либо реактор, пускорегулирующая и коммутационная аппаратура [2, с. 58–60]. Рассмотрим случай, когда двигатель с постоянным моментом сопротивления на валу питается при номинальном напряжении от сети с частотой меньше номинальной. Уменьшение частоты вызовет увеличение магнитного потока и увеличение вращающего момента. Поскольку момент сопротивления остается постоянным, скольжение уменьшится до такой величины, чтобы сохранилось равновесие между вращающим моментом двигателя при пониженной частоте и моментом сопротивления. Вследствие увеличения магнитного потока уменьшится ток ротора, а ток холостого хода увеличится. Ток статора может увеличиться или уменьшится, так же как для случая повышения напряжения. Таким образом, понижение частоты практически равнозначно увеличению напряжения. Следовательно, если при понижении частоты соответственно уменьшить напряжение, то магнитный поток, а, следовательно, и ток холостого хода, ток ротора и ток статора останутся такими же, как и при нормальной работе. При этом будет иметь место некоторое изменение потерь в стали, а, следовательно, и активной составляющей тока холостого хода. Эти изменения практически не скажутся на величине тока статора. Исходя, из вышесказанного произведен расчет частотно-регулируемого электропривода питательного электронасоса. Технические параметры электродвигателя: номиналная мощность 4000 кВт (рабочая мощность 3500 кВт), напряжение 6 кВ, момент сопротивления Мс=0,87, номинальный ток статора 400 А, коэффициент мощности сosφ — 0,89, КПД электродвигателя — 97,3 %. Результаты расчета изображены ниже в графической форме (рис.1. и рис.2.). Рабочий КПД насосного агрегата на нагрузке Мс=0,87, η=0,947. А общие потери двигателя составляли 196 кВт. После изменения частоты и напряжения КПД двигателя достигает η=0,96 при той же нагрузке. А общие потери двигателя составляет 146 кВт. Следует отметить, что использование частотно — регулируемого электропривода даёт возможность энергосбережения путём уменьшения потери на электродвигателях в системе СН ТЭС.
|
|
|
|
|
|

Рис. 2. Изменение КПД при изменении частоты и напряжения Мс=0,87
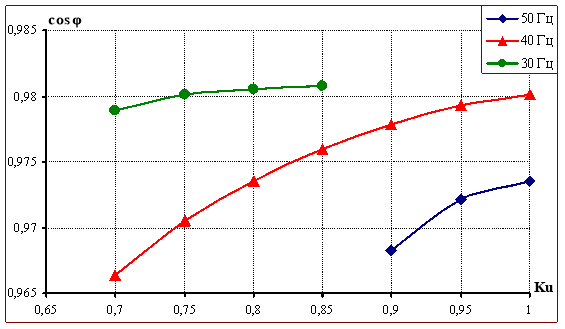
Рис. 3. Изменение коэффициента мощности при изменении частоты и напряжения Мс=0,87.
Расчеты показали, что при использовании частотно — регулируемого электропривода, можно уменьшить потери двигателя, увеличить КПД, также улучшить качество управления технологическим процессом. Кроме того, использование частотно-регулируемого электропривода приводит к следующим возможностям:
– высокое качество регулирования;
– большой диапазон регулирования;
– высокая экономичность;
– легкость в применении;
– легкость эксплуатации и обслуживания.
В мировой практике для регулирования частоты вращения асинхронных двигателей турбомеханизмов (насосов, вентиляторов) преимущественное применение получили двухзвенные преобразователи с регулируемой выходной частотой (ПЧ). ПЧ – это устройства, состоящие из выпрямителя, преобразующего переменный ток сети 50 Гц в постоянный, и автономного инвертора с регулируемой выходной частотой. Инвертор преобразует постоянные ток и напряжение в переменные – с новыми значениями, необходимыми для регулирования частоты вращения электродвигателя в требуемом диапазоне, определяемом режимами работы механизмов СН. Электрическое регулирование частоты вращения механизмов СН характеризуется высоким КПД и позволяет эффективно формировать (средствами интеллектуальной силовой и информационной электроники) оптимальные электромагнитные и электромеханические процессы при пуске и самозапуске электродвигателей и тем самым обеспечивать щадящие режимы работы тепломеханического и электрического оборудования.
Электрическое регулирование, реализуемое на основе электроприводов с изменяемой частотой вращения, позволяет обеспечить оптимальное управление технологическими комплексами СН ТЭС. Такое регулирование является эффективным инструментом снижения потерь и увеличения рационального топливоиспользования. Три ключевые особенности определяют условия применения частотно-регулируемых электроприводов в СН ТЭС [4].
|
|
|
Первая особенность следует из проблемы покрытия переменной части графиков нагрузки энергообъединений. В большинстве энергосистем России, характеризующихся коэффициентом неравномерности (т. е. соотношением минимальной и максимальной нагрузки), порядка 0,4–0,66, все большая часть ТЭС с пылеугольными и газомазутными энергоблоками вытесняется в переменную часть графиков нагрузок и работает в маневренных режимах. К регулированию мощности энергосистем наряду с конденсационными энергоблоками привлекаются и теплоэлектроцентрали из-за нехватки маневренных мощностей. Поэтому при применении ЧРП в СН должна быть обеспечена надежность и экономичность работы энергоблоков при расширенном регулировочном диапазоне вплоть до возможности работы на покрытие всей нагрузки СН.
Вторая особенность связана с тем, что формирование электрических сетей СН ТЭС осуществляется на двух уровнях напряжения. Это обусловлено широкой номенклатурой механизмов и соответствующим диапазоном мощностей применяемых асинхронных двигателей (АД) с короткозамкнутым ротором. В связи с этим частотно-регулируемые приводы должны быть рассчитаны на согласование с соответствующими напряжениями АД и сетей СН 6 кВ (10 кВ) и 380 В (660 В) и допускать возможность использования стандартных АД. Последнее позволяет в целом ряде случаев снизить затраты, оснащая находящиеся в эксплуатации двигатели преобразователями частоты. При подключение ПЧ к сетям электроснабжения и АД необходимо решить проблему их электромагнитной совместимости.
Третья особенность обусловлена характерными свойствами СН, их ролью в технологическом процессе производства электрической и тепловой энергии, режимами работы и условиями эксплуатации на ТЭС. Применение ЧРП не должно усложнять протекание таких режимов, как:
· к. з. на секциях СН, к. з. в ПЧ, АД или их соединительных кабелях. АВР при исчезновении рабочего напряжения на шинах СН и при повреждении ПЧ – для сохранения живучести потребителей СН и энергоблока в целом;
· самозапуск после кратковременного перерыва электроснабжения СН или глубокого снижения напряжения – для сохранения энергоблока в рабочем режиме с заданной нагрузкой.
На рис. 4 приведены сравнительные зависимости КПД разных типов гидромуфт и ПЧ при изменении нагрузки электропривода и его частоты вращения. Видно, что энергоэффективность ЧРП выше, особенно с разгрузкой. Зависимости, приведенные на рис. 2, были получены фирмой General Eleсtric по данным пользователей гидроприводов Voith. Как видно, при снижении частоты вращения ниже 80% КПД механического привода быстро снижается.
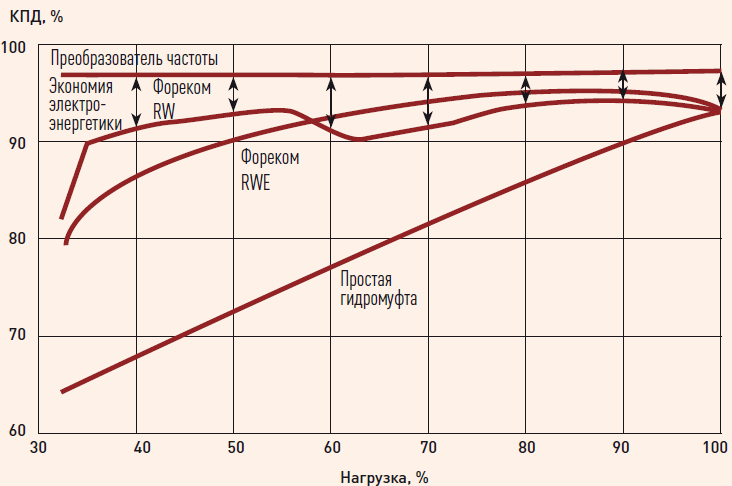
Рис. 4, Зависимость КПД преобразователя частоты и гидромуфты в диапазоне изменения электропривода.
|
|
|
