 |


Параметры линейки промышленных компьютеров Rokcwell Automation 10 глава
|
|
|
|
При изменении скорости движения потока положение сечения самого суженного места В-В относительно диафрагмы меняется, поэтому при практических измерениях невозможно осуществить измерение наименьшего давления  . При практических замерах измеряют разность статических давлений
. При практических замерах измеряют разность статических давлений  до и после сужающего устройства.
до и после сужающего устройства.
Диафрагма имеет острую кромку, направленную навстречу движущемуся потоку.
Стандартное сопло в отличие от диафрагмы характеризуется плавным выходным участком (рис. 8.14, б), за счет чего уменьшаются безвозвратные потери напора потока.
Сопло Вентури имеет плавный входной участок, цилиндрическую часть и расширяющуюся коническую часть (рис. 8.14, в). Благодаря наличию выходной расширяющейся части потеря давления ниже, чем у стандартного сопла.
Таким образом, мы имеем следующее соотношение:
 ,
,
из которого следует, что чем по конструкции проще сужающее устройство, тем больше безвозвратные потери напора потока. Существуют нормы расчета стандартных сужающих устройств, позволяющие для определенных значений параметров среды и заданного перепада давлений на сужающем устройстве при максимальном расходе определить геометрические характеристики сужающего устройства. Увеличенные расходы потерь предусматривают увеличенные текущие затраты на привод насосов перекачивающих среду расход которой мы измеряем.
Выбор типа стандартного сужающего устройства осуществляется на основе технико-экономического расчета. Сравниваются капитальные затраты на изготовление конкретного типа сужающего устройства и его установку с затратами на привод насосов для создания повышенного давления с учетом конкретных потерь данного сужающего устройства.
|
|
|
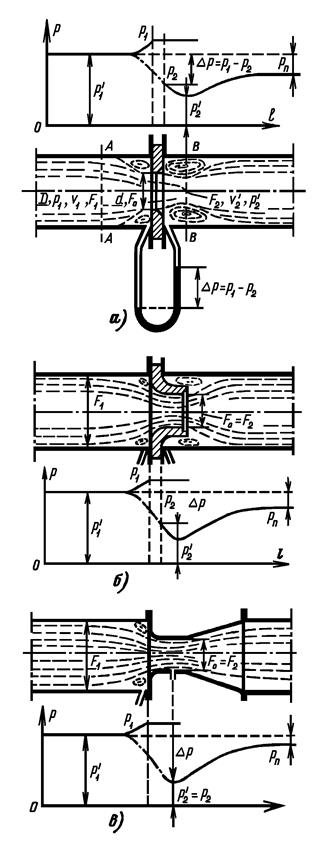
Р и с. 8.14. Характер изменения потока среды при протекании
через сужающие устройства и распределение статического давления
при установке различных стандартных сужающих устройств:
а – диафрагмы; б – стандартного сопла; в – сопла Вентури
Установим зависимость между расходом и перепадом давления. При выводе математического соотношения полагаем следующее:
− измеряемая среда – идеальная несжимаемая жидкость, в которой отсутствуют силы вязкости и трения о стенки трубопровода;
− процесс протекания через сужающее устройство адиабатичен;
− скорости движения потока ниже скоростей распространения в нем звука.
Для сечений А-А и В-В, в которых статические давления  и
и  , составим уравнение Бернулли
, составим уравнение Бернулли
 (8.25)
(8.25)
и уравнение неразрывности среды
 . (8.26)
. (8.26)
Для идеальной несжимаемой жидкости  . Сечение
. Сечение  измерить трудно, поэтому удобнее выразить его через сечение
измерить трудно, поэтому удобнее выразить его через сечение  , введя коэффициент сужения струи после сужающего устройства
, введя коэффициент сужения струи после сужающего устройства  :
:
 . (8.27)
. (8.27)
Отношение проходного сечения диафрагмы к диаметру трубопровода называется модулем m сужающего устройства:
m = /  . (8.28)
. (8.28)
Подставляя в уравнение (8.26) соотношения (8.27) и (8.28), получим
 . (8.29)
. (8.29)
Решая уравнение (8.25) относительно  с учетом соотношения (8.29), получим
с учетом соотношения (8.29), получим
 . (8.30)
. (8.30)
Поскольку в действительности измерить не представляется возможным, то принято определять скорость по перепаду давления  до и после диафрагмы у стенки трубопровода. При этом в соотношение (8.30) вводится соответствующий поправочный коэффициент. Для перехода от идеальной жидкости, для которой получено соотношение (8.30), к реальной, в которой существуют силы вязкости и внутреннего трения, необходимо также ввести поправочный коэффициент. Оба коэффициента объединяют в один поправочный множитель
до и после диафрагмы у стенки трубопровода. При этом в соотношение (8.30) вводится соответствующий поправочный коэффициент. Для перехода от идеальной жидкости, для которой получено соотношение (8.30), к реальной, в которой существуют силы вязкости и внутреннего трения, необходимо также ввести поправочный коэффициент. Оба коэффициента объединяют в один поправочный множитель  . С учетом поправочного коэффициента соотношение (8.30) принимает следующий вид:
. С учетом поправочного коэффициента соотношение (8.30) принимает следующий вид:
 . (8.31)
. (8.31)
Для измерения перепада давления на сужающих устройствах используются дифференциальные манометры. В качестве недостатка метода измерения расхода с помощью сужающих устройств можно отнести наличие прямых участков трубопровода до и после установки сужающих устройств.
|
|
|
Дифференциальным манометром называется прибор, который служит для измерения перепада давления, когда ни одно из давлений не равно атмосферному. Обычно в энергетике используются промышленные дифференциальные манометры – расходомеры, которые являются деформационными бесшкальными приборами с дистанционной системой передачи показаний. Их применяют для измерения расходов, перепадов давлений различных сред, а также для измерения уровней.
Схема деформационного дифференциального манометра представлена на рис. 8.15. Чувствительным элементом прибора служит мембранный блок, состоящий из двух металлических мембранных коробок с гофрированными стенками, которые жестко скреплены между собой. Каждая из мембранных коробок находится в отдельной камере. Внутренняя полость коробок заполнена дистиллированной жидкостью. Нижняя коробка расположена в плюсовой камере, и на неё действует большее из давлений  , а верхняя коробка расположена в минусовой камере, и на неё действует меньшее из давлений
, а верхняя коробка расположена в минусовой камере, и на неё действует меньшее из давлений 
 . Верхняя мембранная коробка соединена с сердечником, находящимся в разделительной трубке (Т).
. Верхняя мембранная коробка соединена с сердечником, находящимся в разделительной трубке (Т).
С наружной поверхности трубки располагается обмотка датчика дистанционной системы передачи показаний.
Под действием разности давлений  нижняя мембранная коробка сжимается, и часть жидкости из неё перемещается в верхнюю мембранную коробку. Деформация верхней мембранной коробки заставляет перемещаться сердечник. Измеряемый перепад давления уравновешивается упругими силами, возникающими при деформации мембранных коробок.
нижняя мембранная коробка сжимается, и часть жидкости из неё перемещается в верхнюю мембранную коробку. Деформация верхней мембранной коробки заставляет перемещаться сердечник. Измеряемый перепад давления уравновешивается упругими силами, возникающими при деформации мембранных коробок.
Р и с. 8.15. Схема деформационного дифференциального манометра
В зависимости от предельного перепада давления, которое должен измерять прибор, в нем устанавливаются мембранные коробки соответствующей жесткости.
Дифференциальный манометр, сужающее устройство, соединительные (импульсные) линии между ними называют расходомерами.
8.3.3. Тахометрические расходомеры
Тахометрический расходомер состоит из тахометрического преобразователя расхода и счетного суммирующего механизма [169]. Под тахометрическим преобразователем понимают первичный преобразователь, в котором скорость движения потока среды преобразуется в пропорциональную скорость вращения чувствительного элемента. В зависимости от конструкции чувствительного элемента счетчики подразделяются на турбинные, крыльчатые, шариковые, роторно-шаровые и камерные. К камерным относятся барабанные, с измерительными мехами (мембранами), диафрагмами, а также поршневые, ротационные и др.
|
|
|
В турбинных счетчиках винтообразный или с лопатками вал располагается вдоль потока, а в крыльчатых – перпендикулярно к потоку. У роторно-шаровых расходомеров шар или другое тело вращается вокруг своей оси под воздействием потока. Эти приборы также называют левитирующими, или расходомерами с гидродинамической подвеской ротора.
В качестве примера на рис. 8.16 показана схема тахометрического расходомера, вращающимся узлом которого является турбинка.

Р и с. 8.16. Тахометрический расходомер с цифровым
магнитоэлектрическим преобразователем числа оборотов
Турбинка 1 под воздействием напора воды вращается со скоростью w = a/ T в направляющих 2 и 3. На валу турбинки установлены спицы с закрепленными на концах постоянными магнитами 4. При прохождении магнита в районе установки магнитоуправляемого реле 5 контакты реле из нормально разомкнутого состояния переходят в замкнутое. В результате процесса «замыкание-размыкание» приложенное к реле напряжение преобразуется в импульсы, число которых, равное количеству полуоборотов турбинки, подсчитывается счетчиком 6 в виде двоичного кода NV. Счетчик периодически опрашивается и одновременно сбрасывается в нулевое состояние. Период опроса Т 0 определяется настройкой генератора считывающих импульсов 7 и зависит от требуемых значений точности и быстродействия. Если Т 0=1 сек, то цифровой код скорости жидкости будет равен величине
 , (8.32)
, (8.32)
где kwv – коэффициент, связывающий скорость вращения турбинки (об./сек), со скоростью движения жидкости (м/сек).
|
|
|
Достоинства механических первичных преобразователей – дешевизна, отсутствие влияния внешних электромагнитных помех, простота монтажа. Недостатками большинства тахометрических преобразователей являются: низкая точность (от 1% и выше), наличие перемещающихся и вращающихся деталей; высокая чувствительность к механическим примесям в измеряемой среде. Промышленностью выпускается широкая номенклатура механических счетчиков для измерения расхода газа, пара, холодной и горячей воды: ВСГ, ВСГд, ВСХ, ВСТ, ВХСН, различающихся способом установки, размерами трубопроводов (dу=15…250 мм), диапазоном температур измеряемого носителя, точностью и разрешающей способностью. Для АСКУЭ используются механические преобразователи, сопряженные с датчиками, выдающими нормированный электрический сигнал Iс={4...20} мА или цифровой код Nс, пропорциональный измеряемому параметру. К ним относятся, например, счетчики воды ВСХНд, ВСТН с герконовыми датчиками, имеющими магнитоуправляемые контакты. На рис. 8.15 показан вариант установки цифрового магнитоэлектрического преобразователя в тахометрическом расходомере.
8.3.4. Ультразвуковые расходомеры
В ультразвуковом расходомере на пьезоэлементе используется волна частотой от 100 кГц до 20 МГц, проходящая через измеряемый поток жидкости или газа. При этом регистрируются изменения параметров сигнала, вызываемые потоком. Основной элемент – электроакустический преобразователь (ЭАП), который работает в качестве передатчика и приёмника поочередно. Он может устанавливаться как в непосредственном контакте со средой, так и на стенке трубы (накладные расходомеры). Существуют два основных типа измерения: времяимпульсный и доплеровский. Времяимпульсное измерение (рис. 8.17, а) основано на разности прохождения ультразвукового сигнала по потоку и против потока.
 а б
а б
Р и с. 8.17. Типы ультразвукового измерения расхода газа (жидкости):
а – времяимпульсное измерение; б – доплеровское измерение
Пусть ультразвук распространяется под углом a к стенкам трубы в осевом сечении, скорость его равна v 0 и расстояние между электроакустическими преобразователями ЭАП1 и ЭАП2 равно l. Тогда при появлении потока со скоростью V разница между временем прохождения сигнала в разные стороны составляет
 (8.33)
(8.33)
где  .
.
Измерение разности времен, проводимое в интервалах времени, измеряемых микросекундами, позволяет вычислить скорость потока. Если сложить времена прохождения сигнала в разных направлениях, то можно вычислить скорость ультразвука в среде. Скорость звука зависит от температуры, давления и состава газа. Его измерение даёт возможность контролировать стабильность характеристик потока, увеличивая точность измерения.
|
|
|
В результате простых математических преобразований получается следующая формула для определения расхода жидкости, протекающей относительно мест установки ЭАП:
 , (8.34)
, (8.34)
где Ду – диаметр трубопровода на месте установки ЭАП; kк –программируемый коэффициент коррекции.
Доплеровское измерение (рис. 8.17, б) использует эффект изменения частоты волны при её отражении от движущегося объекта. В случае потока газа или жидкости отражающими объектами служат примеси или участки с измененной плотностью (пузырьки воздуха). Приёмник ЭАП2 и передатчик ЭАП1 образуют измерительный луч. Если луч распространяется в потоке под углом a со скоростью v 0и частотой f 0, то при отражении звука от частиц примесей, находящихся в потоке скорости V, частота звука изменяется: если поток движется навстречу лучу, то частота увеличивается, если против луча – уменьшается в соответствии с формулой
 . (8.35)
. (8.35)
Измерение частоты отражённого сигнала позволяет вычислить скорость потока. Если при времяимпульсном измерении наличие инородных частиц и пузырьков нежелательно, так как они рассеивают измерительный луч, то доплеровский тип, наоборот, требует наличия примесей и пузырьков. Некоторые современные расходомеры совмещают в себе оба типа измерения, расширяя, таким образом, диапазон применения.
В большинстве ультразвуковых расходомеров реализовано несколько измерительных лучей (до восьми). Многолучевое измерение потока даёт возможность в ВИП корректировать показания, а также проводить самодиагностику. При сильном рассогласовании показаний между измерительными лучами в ВИП вырабатывается сигнал о выходе за пределы заданной точности.
Существенными достоинствами ультразвуковых расходомеров являются: отсутствие потерь давления в результате измерения; высокая надёжность вследствие отсутствия движущихся механических частей; способность работы на трубах большого диаметра без нарушения целостности трубы и рабочего процесса.
8.3.5. Вихревые расходомеры
Принцип действия вихревого расходомера (ВР) основан на зависимости частоты срыва вихрей с поверхности трапецеидальной призмы, помещенной в трубопроводе, от объемного расхода. Сенсором является преобразователь вихревых колебаний движущейся среды, который представляет собой тонкую гибкую пластину, помещенную в канале обратной связи тела обтекания (рис. 8.18). На гибкий электрод, находящийся в поле постоянного магнита и неподвижного электрода, подается ток переменной частоты, который модулируется частотой срывов вихрей. Значение этой частоты с последующим вычислением скорости потока определяется в ВИП.
Структурная схема вихревого расходомера с двумя неподвижными электродами изображена на рис. 8.18. По обе стороны от заземленной гибкой пластины-электрода расположены стержни, один из которых является электродом, а другой – электродом и ограничителем колебаний пластины. При изменении расстояния между колеблющимся гибким электродом и стержневыми электродами одновременно меняется межэлектродная проводимость (если среда проводящая). Ее величина преобразуется в электрический сигнал. Такой способ измерения сопротивления проводников называют кондуктометрией, поэтому вихревой расходомер, работающий в данном режиме, является кондуктометрическим.
Замыкания при взаимном касании электродов можно преобразовать в выходной импульсный сигнал. В этом случае ВР становится контактно– кондуктометрическим иимеет два рабочих режима, которые отличаются параметрами движения и методом съема выходного сигнала:
− режим А имеет место при малых амплитудах колебаний гибкого электрода, когда он не касается стержневого электрода или касается последнего только при больших расходах измеряемой среды;
− режим Б возникает при больших амплитудах колебаний гибкого электрода, когда он касается стержневого электрода при каждом колебании во всем диапазоне измеряемых расходов. Для работы в данном режиме жесткость гибкого электрода должна быть существенно ниже, чем в первом случае.

Р и с. 8.18. Схема контактно-кондуктометрического
вихревого расходомера
Вихревой расходомер, работающий в режиме А, отличается высокой чувствительностью, поскольку даже при небольших амплитудах колебаний гибкого электрода на выходе устройства формируется полезный сигнал. Это позволяет использовать такой преобразователь в приборах, рассчитанных на измерение относительно малых расходов, при низких скоростях потока (0,04-0,05 м/сек) при теле обтекания 25,56 мм (1 дюйм).
8.3.6. Электромагнитные расходомеры
Электромагнитные (индукционные) расходомеры применяют для измерения объемного расхода электропроводных жидкостей. Принципиальная схема электромагнитного расходомера с переменным магнитным полем показана на рис. 8.19. Принцип действия такого расходомера основан на законе электромагнитной индукции, согласно которому наведённая в проводнике ЭДС пропорциональна скорости движения его в магнитном поле. При прохождении сетевой или водопроводной воды (любой другой жидкости, обладающей достаточной электропроводностью) через магнитное поле в ней, как в движущемся проводнике, наводится электродвижущая сила, пропорциональная средней скорости движения жидкости. Прибор состоит из первичного электромагнитного преобразователя расхода и электронного измерительного усилителя. Корпус преобразователя представляет собой отрезок трубы из немагнитного материала. Выходной сигнал снимается двумя электродами, расположенными диаметрально противоположно и проходящими через стенку трубы. Важным условием нормальной работы такого расходомера является однородность магнитного поля в осевом и поперечных направлениях. При неоднородности магнитного поля в жидкости появляются местные циркуляционные токи, искажающие результаты измерения.
К достоинствам индуктивных и трансформаторных датчиков относятся большая выходная мощность, высокие надежность, чувствительность и разрешающая способность, простота конструкции, малые масса и размеры. Недостатками таких расходомеров являются трудность регулировки и компенсации начального напряжения на выходе преобразователя; необходимость экранирования для уменьшения уровня помех, что увеличивает размеры и массу; возможность работы только на переменном токе; ограниченность диапазона линейной статической характеристики.

Р и с. 8.19. Принцип работы преобразователя расхода
электромагнитного типа
Электромагнитные преобразователи расходомеров в зависимости от принципа действия могут быть параметрическими или генераторными. К параметрическим относятся устройства, преобразующие изменение входного механического воздействия в изменение параметров магнитной цепи – магнитной проницаемости μ, магнитного сопротивления RM и индуктивности обмоток L. В генераторных преобразователях индукционного типа для получения выходного сигнала используется закон электромагнитной индукции. Генераторные преобразователи могут быть выполнены на базе трансформаторов и электрических машин.
Для устройства, изображенного на рис. 8.20, а, выполняется соотношение, связывающее индуктивность обмотки L и взаимоиндуктивности M обмоток w 1и w 2:
 (8.36)
(8.36)
где RM = l/μaS – сопротивление ферромагнитного участка магнитной цепи; Rδ=δ/μ0S – сопротивление воздушного зазора δ; l – длина ферромагнитного участка магнитной цепи; S – площадь сечения сердечника и зазора; μα, μ0 – магнитная проницаемость ферромагнитного участка магнитной цепи и воздуха в зазоре соответственно.

а б в
Р и с. 8.20. Типы конструкций электромагнитных ИП
Значения L и М можно изменять, уменьшая или увеличивая зазор δ, изменяя положение якоря 1, изменяя сечение магнитного потока, поворачивая якорь 1 относительно неподвижной части магнитной цепи 2, вводя в воздушный зазор пластину 3 из ферромагнитного материала (соответственно уменьшая δ и магнитное сопротивление зазора) или из электропроводящего неферромагнитного материала. В последнем случае изменение L и М обусловлено размагничивающим действием токов, индуктированных в пластине основным магнитным потоком, проходящим по магнитной цепи.
Измерительные преобразователи, преобразующие естественную входную величину в виде перемещения в изменение индуктивности L, называются индуктивными.
Преобразователи, преобразующие перемещение в изменение взаимоиндуктивности M, принято называть трансформаторными. В трансформаторных преобразователях изменение М можно получить изменением магнитного сопротивления, а также перемещением одной из обмоток вдоль или поперек магнитной цепи.
Если к замкнутой магнитной цепи преобразователя приложить сжимающие, растягивающие или скручивающие усилия, то под их воздействием изменится магнитная проницаемость m о сердечника, что приведет к изменению его магнитного сопротивления и соответственно к изменению L или М (рис. 8.20, б). Такие преобразователи, основанные на изменении магнитного сопротивления, обусловленного изменением магнитной проницаемости ферромагнитного сердечника под воздействием механической деформации, называются магнитоупругими. Их широко применяют для измерения сил, давлений, моментов и др.
Если в зазоре постоянного магнита или электромагнита, через обмотку которого пропускается постоянный ток, перемещать обмотку (рис. 8.20, в), то согласно закону электромагнитной индукции в обмотке появляется ЭДС
 , (8.37)
, (8.37)
где dФ/dt – скорость изменения магнитного потока, сцепляющегося с витками обмотки w 2.
8.4. Преобразователи угловых и линейных перемещений, давления, влажности, концентрации
8.4.1. Емкостные датчики
Принцип действия емкостных датчиков основан на изменении емкости конденсатора под воздействием входной преобразуемой величины. Емкость конденсатора определяется соотношением
 , (8.38)
, (8.38)
где ε – относительная диэлектрическая проницаемость диэлектрика; ε 0 – диэлектрическая проницаемость вакуума; S – площадь пластины; δ – толщина диэлектрика, или расстояние между пластинами.
На емкость конденсатора можно влиять изменением площади перекрытия пластин (рис. 8.21, а), диэлектрической проницаемости e вещества, находящегося в зазоре между обкладками конденсатора (рис. 8.21, б), расстояния между ними δ=δ 0 +x (рис. 8.21, в). Выбор изменяемого параметра зависит от характера измеряемой величины.
Емкостные преобразователи используют для измерения угловых и линейных перемещений, линейных размеров, уровня, давления, влажности, концентрации и др. Конструктивно они могут быть выполнены с плоскопараллельными, цилиндрическими, штыревыми и гибкими электродами, с наличием или отсутствием диэлектрика между пластинами.
Емкостной плоскопараллельный ПИП с изменяемой площадью перекрытия S описывается уравнением преобразования
 , (8.39)
, (8.39)
где а – ширина пластин конденсатора; х –длина перекрытия электродов (см. рис. 8.8, а).



а б в
Р и с. 8.21. Виды измерения параметров емкостными датчиками
Емкостные преобразователи перемещения с переменной площадью перекрытия используют и для измерения угловых величин. В этом случае емкость измерительного преобразователя
 , (8.40)
, (8.40)
а чувствительность
 (8.41)
(8.41)
где r2 и r1 – наружный и внутренний радиусы пластин; j 0 – начальный угол перекрытия пластин.
К достоинствам емкостных ИП можно отнести простоту конструкции, малые размеры и массу, высокую чувствительность, большую разрешающую способность при малом уровне входного сигнала, отсутствие подвижных токосъемных контактов, высокое быстродействие; возможность получения необходимого закона преобразования за счет выбора соответствующих конструктивных параметров, отсутствие влияния выходной цепи на результат измерения.
Недостатки емкостных ИП состоят в относительно низком уровне выходной мощности сигналов, нестабильности характеристик при изменении параметров окружающей среды, влиянии паразитных емкостей, гистерезис давления. Эти недостатки устраняются введением соответствующих поправок в ВИП. Точность такого сенсора составляет 0,035…0,075% от диапазона измеряемого давления.
8.4.2. Оптоэлектронные преобразователи
Оптическое излучение характеризуется большим числом параметров (интенсивностью, длиной волны, фазой, частотой, поляризацией и др.), каждый из которых можно использовать для измерения различных физических величин: температуры, давления, геометрических размеров, скорости, концентрации, состава и т.д. В общем случае оптоэлектронный преобразователь (ОЭП) измеряемой величины a ввыходной электрический сигнал содержит (рис. 8.22) источник излучения оптического потока Ф, диафрагму, оптическую среду (или световод), считывающие элементы и приемник излучения, воспринимающий поток Ф и преобразующий его посредством кодирующего сопряжения в электрический сигнал Iф, который далее подается в вычислитель измерительного преобразователя, в котором формируется цифровой код, соответствующий измеряемому параметру.

Р и с. 8.22. Обобщенная структурная схема ОЭП:
ИИ – источник излучения; Д – диафрагма; ЧЭ – чувствительный элемент; СчС – считывающая система; КС – кодирующее сопряжение; ОС – оптическая система; ФПУ – фотоприемное устройство; ВхУ – входное устройство; ПНК – преобразователь напряжения в код; ВыхУ – выходное устройство; a – физическая величина; Na – выходной код
Полупроводниковые лазеры являются источниками когерентного монохроматического излучения. Они позволяют получать интенсивные остронаправленные пучки света. Светодиоды – один из наиболее широко применяемых излучателей в видимой части спектра и в инфракрасном диапазоне. Эти типы излучателей характеризуются высоким КПД (80-90%), малыми размерами, простотой модуляции оптического излучения.
К приемникам оптического излучения относятся фоторезисторы, фотодиоды, фототранзисторы, интегральные фотоприемники и др. Сопротивление фоторезисторов изменяется под действием оптического излучения. В фотодиодах под воздействием света генерируется электрический ток (фототок). Фототранзисторы можно рассматривать как комбинацию фотодиода и транзистора, усиливающего фототок. Интегральные фотоприемные устройства выполняют функции аналогового (профилированные фотоприемники, мультисканы) или дискретного (матричные фотоприемники) преобразователя перемещения луча или его энергетического центра [152].
|
|
|
