 |


Назначение, устройство и описание работы
|
|
|
|
ГОУ ВО
Уральский государственный горный университет
Кафедра Электрификации горных предприятий
Курсовой проект по дисциплине
«Теория электропривода»
Тема: электропривод механизма поворота
Экскаватора ЭКГ-5А
Выполнил: Кузнецов И. В.
Группа: ЭГП-5з
Проверил: Тельманова Е.Д.
Екатеринбург 2017
СОДЕРЖАНИЕ
1.Техническое задание…………………………………………………………………….……….…..3
2.Назначение, устройство и описание работы экскаватора ЭКГ-5А…………….7
3.Расчет статических нагрузок механизма и параметров одномассовой
и двухмассовой схем замещения ………………………………………………….…………10
4. Расчет параметров структурной схемы силовой части электропривода
постоянного тока ……………………………….…………………………………………….….……13
5. Расчет нагрузочной диаграммы электропривода……………………………….……17
6. Список литературы………………………… ………………………………………………………….20
Графическая часть:
Лист 1. Алгоритмические структурные схемы электропривода
Лист 2. Нагрузочная диаграмма и тахограмма электропривода. Кинематическая схема механизма
1. ТЕХНИЧЕСКОЕ ЗАДАНИЕ
на выполнение курсовой работы по дисциплине
«Теория электропривода»
Фамилия: _Кузнецов __ Имя: Илья Отчество: Владимирович __
Группа ____ ЭГП-5з_________________
Дата выдачи задания «02» _ 02 _ 2017 г. Срок сдачи проекта «___» _____ 201__ г.
1. Тема курсового проекта «Электропривод механизма (технологического комплекса) __ подъёма экскаватора ЭКГ-5А______________________
2. Содержание проекта:
1) назначение, устройство и описание работы технологического оборудования;
2) расчет статических нагрузок механизма и параметров одномассовой и двухмассовой схемы замещения;
|
|
|
3) расчет параметров структурной схемы силовой части электропривода постоянного тока
4) расчет нагрузочной диаграммы электропривода постоянного тока;
3. Графическую часть выполнить на листе формата А1 (или четырех листах формата А3) в соответствии с действующими стандартами в объеме: кинематические и расчетные схемы механизма; функциональные и алгоритмические структурные схемы электропривода, таблицы параметров передаточных функций в именованных и относительных единицах, динамические характеристики электропривода; нагрузочные диаграммы, тахограммы
4. Дополнительные требования:
________________________________________________________________________
________________________________________________________________________
Подписи:
Студент _________________ И. В. Кузнецов
(Инициалы, Фамилия)
Руководитель курсовой работы __________________ Е.Д. Тельманова
Исходные данные:
Силовой модуль экскаватора
| Экскаватор | Электропривод |
| ЭКГ-5А | Поворот |
Используемые в главном приводе экскаватора электрические машины.
| Экскаватор | Электропривод | |
| генератор | двигатель | |
| ЭКГ-5А | ППЭ-13/14 | ДПВ-52 |
Технические данные генератора экскаватора.
| Наименование параметра | Обозначение | Тип генератора |
| ППЭ-13/14 | ||
| 1.Номинальная мощность, кВт | Pн | |
| 2.Номинальное напряжение, В | Uн | |
| 3. Номинальный ток, А | Iн | |
| 4.Номинальная частота вращения, об/мин | nн | |
| 5.Число пар полюсов | 2p | |
| 6.Напряжение возбуждения, В | Uв | |
| 7.Ток возбуждения, А | Iв | |
| 8.Сопротивление при 15̊С, Ом: Обмотки якоря: Дополнительных полюсов: Обмотки возбуждения: Компенсационной обмотки: | Rя Rдп Rв Rко | 0.055 0.016 0.003 - |
| 9.Число витков независимого возбужде-ния, вит. | W | |
| 10.Магнитный поток одного полюса, Вб×10-2 | Фн | 3.08 |
Технические данные двигателя экскаватора.
| Наименование параметра | Обозначение | Тип двигателя |
| ДПВ-52 | ||
| 1.Номинальная мощность, кВт | Pн | |
| 2.Номинальное напряжение, В | Uн | |
| 3. Номинальный ток, А | Iн | |
| 4.Номинальная частота вращения, об/мин | nн | |
| 5.Число пар полюсов | 2p | |
| 6.Напряжение возбуждения, В | Uв | |
| 7.Ток возбуждения, А | Iв | 13.5 |
| 8.Сопротивление при 15°С, Ом: Обмотки якоря: Дополнительных полюсов: Компенсационной обмотки: | Rя Rдп Rко | 0,019 0,013 - |
9.Момент инерции, кг  м2 м2
| Jдв | 1,87 |
|
|
|
Параметры экскаватора
| Наименование параметра | Обозначение | Экскаватор |
| ЭКГ -5А | ||
| 1.Емкость, м3 | Е | 5,0 |
| 2.Длина стрелы, м | Lc | 10,5 |
| 3. Длина рукоятки, м | Lр | 7.8 |
| 4. Угол наклона стрелы, град | ᵠ | |
| 5.Масса рукоятки, т | mp | 7.85 |
| 6.Масса ковша, т | mк | 9.87 |
| 7.Геометрические параметры ковша, м: длина ширина высота | lк bk hk | 2.6 2,20 2.56 |
| 8.Высота оси пяты стрелы, м | В | 2.54 |
| 9.Высота напорного вала, м | Нн | 6.70 |
| 10.Высота экскаватора, м | Н | 10.92 |
| 11.Диаметр каната, мм | dk | |
| 12.Передаточное отношение механизма подъёма | Iп | 389.8 |
| 13. Максимальная высота черпания, м | Нчmax | 14.72 |
| 14.КПД механизмов поворота | ΗВ | 0,87 |
| 15.Номинальная скорость м/с: подъема ковша движения рукоятки | Vп Vн | 0,87 0,47 |
| 16.Расчетная продолжительность цикла, с | Тц |
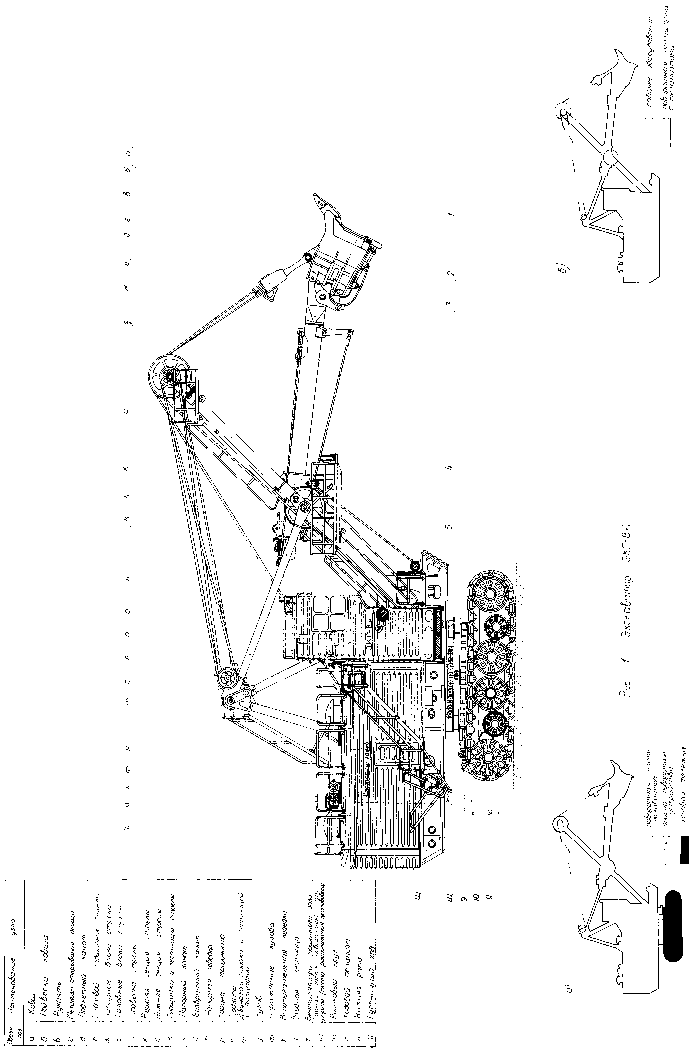
Назначение, устройство и описание работы
Экскаватора ЭКГ-5А.
Экскаватор ЭКГ-5А состоит из следующих составных частей: поворотной части, включающей в себя поворотную платформу с расположенными на ней механизмами, и рабочее оборудование: ходовой тележки, состоящей из нижней рамы, двух гусеничных рам с колесами и гусеничными цепями; ходового механизма, зубчатого венца, роликового круга. Все механизмы на платформе закрыты кузовом.
Для удобства ремонта и монтажа механизмов на платформе кровля кузова имеет съемные панели. Расположение основных агрегатов и узлов экскаватора обеспечивает свободный доступ к ним для осуществления монтажных, демонтажных и ремонтных работ. Большинство механизмов и составных частей экскаватора ЭКГ-5А имеют блочную конструкцию и взаимозаменяемы, что позволяет применять при ремонтах агрегатно-узловой метод.
Рабочее оборудование включает ковш, рукоять ковша, механизм открывания ковша, стрелу с напорным механизмом и двуногую стойку. Нижний конец стрелы опирается на подпятники поворотной платформы, а верхний - поддерживается на весу канатным полиспастом.
На поворотной платформе установлены подъемная лебедка, два поворотных механизма, электрооборудование, пневмосистема, двуногая стойка, стреловая лебедка и кузов.
В передней правой части платформы расположена кабина машиниста.
Поворотная платформа через роликовый круг опирается на ходовую тележку и соединена с ней центральной цапфой. Между поворотной и нижней рамами установлен высоковольтный токоприемник.
Ходовая тележка состоит из нижней рамы, гусеничного хода, зубчатого венца с нижним кольцевым рельсом, редуктора хода с тормозом, гидросистемы управления тормозом, муфтами переключения гусеничного хода.
Ковш состоит из передней и задней стенок, днища, коромысла и обоймы с уравнительным блоком. Передняя стенка из высокомарганцовистой стали снабжена пятью съемными зубьями из той же стали. Передняя стенка и зубья наплавляются твердым сплавом типа «Сормайт». Корпус ковша соединяется пальцами с коромыслом и днищем.
Рукоять ковша состоит из двух сварных балок прямоугольного сечения, изготовленных из листов низколегированной стали с приваренными цельнокатаными рейками. Стрела представляет собой сварную металлическую конструкцию коробчатого сечения. На стреле экскаватора установлены напорный механизм, головные блоки, блоки стрелового каната и лебедка открывания ковша. Для устойчивости стрела закреплена к поворотной платформе боковыми тягами.
Лебедка подъема стрелы имеет привод от электродвигателя лебедки подъема ковша.
Напорный механизм приводится от электродвигателя, на валу которого закреплена шестерня, находящаяся в зацеплении с зубчатым колесом промежуточного вала редуктора.
Поворотный механизм состоит из двух одинаковых агрегатов. Каждый из них имеет вертикальный электродвигатель с фланцем, опирающимся на корпус редуктора.
Ходовой механизм приводится в движение электродвигателем, установленным на передней стенке нижней рамы.
Пневматическая система предназначена для управления тормозами подъема, поворота, напора, продувки электрооборудования от пыли, подачи звукового сигнала и привода различного пневматического инструмента сжатым воздухом от одноступенчатого двухцилиндрового компрессора подачей 580 л/мин рабочим давлением 0,7 МПа.
Гидросистема предназначена для управления тормозом ходового механизма и механизма переключения гусениц. Основные детали гидросистемы расположены на задней стенке нижней рамы.
|
|
|
|
|
|
.. 3. РАСЧЕТ СТАТИЧЕСКИХ НАГРУЗОК МЕХАНИЗМА И ПАРАМЕТРОВ ОДНОМАССОВОЙ И ДВУХМАССОВОЙ СХЕМ ЗАМЕЩЕНИЯ
3.1 Определите количество электродвигателей в приводе по данным [1],
табл. 1
Число электродвигателей – 1 шт.
3.2. Номинальная угловая частота вращения электродвигателя и номинальный момент:


3. 3. Коэффициентом превышения момента двигателя в переходных режимах пуска над номинальным λв пределах 1,8…2,0.
Задаюсь λ=2;
3.4. Стопорный момент всех электродвигателей в приводе:


3.5. Приведенный к валу двигателя момент инерции второй массы:


3.6. Коэффициент передачи передаточной функции звена «вторая масса» в именованных и относительных единицах:


3.7. Момент сил статического сопротивления, приведенный к валу двигателя, и относительное значение момента сиггл сопротивления: 
3.8. Суммарный момент инерции электрических двигателей привода и жестко связанных с ним механизмов:

3.9. Коэффициент передачи передаточной функции звена «первая масса» в именованных и относительных единицах:


3.10. Жесткость упругого звена по известной длине каната, числу и диаметру канатов и модулю упругости. Коэффициент заполнения сечения стрелы и участка от головных блоков до ковша, расположенного на 2/3 длины стрелы. Для канатных механизмов экскаватора предварительно рассчитывают коэффициент линейной жесткости каната:


3.11. Параметры передаточной функции упругого звена в именованных и относительных единицах:


3.12. Определяем соотношение масс  и частоту собственных колебаний (частоту резонанса) механической системы:
и частоту собственных колебаний (частоту резонанса) механической системы:


3.13. Расчетная схема двух массовой механической системы, элементная алгоритмическая структурная схема и преобразованная структурная схема по каналу M-ω2:

|

|

|

|

|
 кНм кНм
|
 кНм кНм
|
Рис.1. Двухмассовая расчетная схема механической части.
|
|
|
