 |


Разработка структурной схемы САУ
|
|
|
|
В расчетных системах управления ЭП для повышения диапазона регулирования и качества динамических процессов применяют различные структуры построения регуляторов, используются различные обратные связи.
Для статического и динамического расчета САУ необходимо составить структурную схему, на которой все элементы системы нужно представить их передаточными функциями. Это двигатель, ТП, регуляторы, датчики обратных связей (рисунок 6).

Рис. 2 -Структурная схема САУ
Передаточная функция ТП вместе с системой импульсно-фазового управления, как правило апроксируется апериодическим звеном первого порядка с постоянной времени Tmn в пределах времени 0,006-0,01 с, что обусловлено дискретностью подачи отпирающих импульсов и особенностью работы ТП.
Передаточная функция ТП имеет вид:
 (5.1)
(5.1)
где Kmn - коэффициент передачи ТП.
Коэффициент передачи ТП изменяется в зависимости от величины управляющего напряжения и рассчитывается с использованием
регулировочных характеристик Ed0 = f(α).
 , (5.2)
, (5.2)
где ΔEd — относительное значение ЭДС тиристорного преобразователя, В;
ΔUy - относительное значение напряжения, В.
Электродвигатель постоянного тока при подключении обмотки возбуждения к постоянному напряжению, работает с постоянной магнитным потоком.
Передаточная функция имеет вид:
 (5.3)
(5.3)
т.к. 4Тя>Тм,
Якорная цепь ДПТ описывается передаточной функцией:
 (5.7)
(5.7)
где Еn - ЭДС преобразователя. В;
Едв - ЭДС двигателя, В.
Передаточная функция механической цепи ДПТ:
 (5.5)
(5.5)
Поведение угловой скорости вращения описывается передаточной функцией электромеханического преобразователя в соответствии с основным уравнением движения ЭП:
|
|
|
 (5.6)
(5.6)
Коэффициент обратных связей рассчитывается по формулам:
Коэффициент обратной связи по скорости Кос определяется по формуле:
 (5.7)
(5.7)
где  = 10 В — максимальное напряжение управления;
= 10 В — максимальное напряжение управления;
 - максимальная скорость механизма, рад/с.
- максимальная скорость механизма, рад/с.
 (5.8)
(5.8)
Коэффициент обратной связи по току Кот:
Кот = Кдт ∙ Кш = 102,04∙0,0006 = 0,061 (5.9)
где Кдт - коэффициент датчика тока;
 (5.10)
(5.10)
где Кш - коэффициент шунта.
Выбран шунт: тип 75 ШСН-5;
Номинальный ток: Iнш= 75А;
Номинальное падение напряжения: Uнш= 0,045 В.
Коэффициент шунта Кш определяем по формуле:
 , (5.11)
, (5.11)
Коэффициент обратной связи по напряжению Кон:
 (5.12)
(5.12)
Выходной координатой объекта управления является угловая скорость вращения ωо, а промежуточными: якорный ток, ЭДС двигателя, напряжение якорной обмотки, электромагнитный момент, магнитный ток.
Синтез CA У
Для обеспечения требуемых статических и динамических параметров определим структуру системы.
Поскольку необходимо регулировать скорость и требуется динамика, то система должна иметь контур скорости и контур тока. Настройку контура обычно производят так, чтобы получить технически оптимальный переходный процесс, т.е. настройка на технический оптимум.
Расчет контура тока
Регулятор тока организован по ПИ-закону управления с настройкой на модульный оптимум. Регулятор для обеспечения требуемых динамических параметров должен компенсировать электромагнитную постоянную Тя, а также малую постоянную времени контура тока Т01 (рисунок9).

Рис. 3- Структурная схема по току
Передаточная функция регулятора тока имеет вид:
 (6.1)
(6.1)
где Крm - пропорциональная часть регулятора тока;
 - постоянная времени регулятора тока.
- постоянная времени регулятора тока.
 (6.2)
(6.2)
 (6.3)
(6.3)
где  - малая постоянная времени токового контура.
- малая постоянная времени токового контура.
|
|
|
Тот = 2 ∙ Ттп = 2 ∙ 0,01= 0,02 с, (6.4)
Согласно рисункам 4 и 5 запишем уравнения соответствия
динамических параметров системы и физических параметров схемы реализации:


Рис. 4 -Структурная схема РТ Рис. 5- Принципиальная схема РТ
Зададимся емкостью конденсатора Cост = 1 мкФ = 0,000001 Ф, тогда согласно уравнению 2 системы 6.5, сопротивление Rост составит:
 , (6.6)
, (6.6)
Представив значение Сост = 1 мкФ в уравнение 3 системы 6.5, найдем сопротивление Rзт по формуле:
 (6.7)
(6.7)
Подставив значение Rзт в 1 - е уравнение системы 6.5, получим, что сопротивление Rт составит:
 (6.8)
(6.8)
По расчетам принимаем тип резисторов. Выбираем резисторы серииМЛТ.
Номинальная мощность: 0,125-2 Вт;
Диапазон сопротивления: 8,2 Ом – 10 МОм;
Рабочая температура: 125С0;
Допустимые отклонения: 5, 10, 20.
Датчик тока предназначен для преобразования тока якоря пропорциональное ему напряжение и включает в себя датчик и согласующее устройство. В качестве измерительного преобразователя в датчике использован шунт. В качестве элемента гальванической развязки принимаем микросхему оптоэлектронную полупроводниковую, состоящую из оптопар и транзисторных прерывателей типа К249, КН1Г. Выходное напряжение равно 3,5 В, входной ток равен 20 мА. На выходе датчика должно быть напряжение 10В.

Рис. 6 - Принципиальная схема датчика тока
Расчет контура скорости
Регулятор скорости организован по пропорциональному принципу (П) закону управления с настройкой на модульный оптимум. Регулятор для обеспечения требуемых динамических параметров должен компенсировать электромеханическую постоянную времени системы Тм, а также малую постоянную времени контура скорости Тос (рисунок 6).

Рис. 7- Структурная схема контура скорости Передаточная функция регулятора скорости будет иметь вид:

где Тос - малая постоянная времени контура скорости.
Тос = 2∙ Тот = 4∙ Ттп = 4∙ 0,01 = 0,04 с,
Приведем схему реализации регулятора скорости (рисунок 9).
Приведем структурную схему реализации регулятора скорости (рисунок 8).
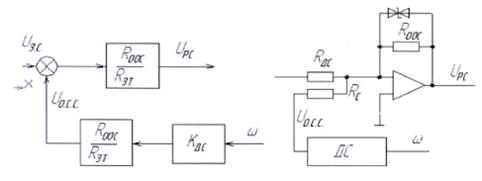
Рис. 8 Структурная схема PC Рис. 9 Схема реализации PC
Согласно рисункам 8 и 9 запишем уравнения соответствия динамических параметров системы и физических параметров схемы реализации:
|
|
|
 (6.11)
(6.11)
где Кдс - коэффициент датчика скорости, которым является тахогенератор.
 (6.12)
(6.12)
Зададимся сопротивлением Rooc = 1 00 кОм, тогда:
 (6.13)
(6.13)
Подставив значение Rзс, найдем Rc:
 (6.14)
(6.14)
Из справочника выбираем стандартный резистор марки:
Датчик скорости получим путем совмещения тахогенератора
(измерительного преобразователя) и согласующего устройства(преобразователя координат), рисунок 10

Рис. 10 Схема датчика скорости
Емкость конденсатора принимаем равной 0,1 мкФ. ЭДС тахогенератора определим по формуле:
Етг = 2 ∙nн ∙ S = 2 ∙ 1500∙ 0,5 = 1500 В, (6.15)
где S - величина скольжения;
nн - номинальная скорость вращения тахогенератора.
 (6.16)
(6.16)
где nн - номинальное число оборотов двигателя;
nmax- максимальное число оборотов тахогенератора.
Структурная схема САУ

Рис.11-Структурная схема САУ
|
|
|
