 |


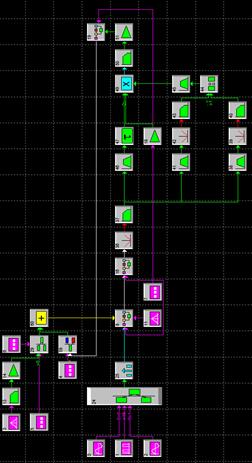
Блок-схема и описание приемника.
|
|
|
|
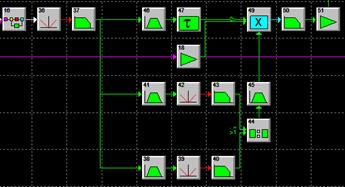
16 – система АРУ (в данной работе не проектировалась в целях упрощения и уменьшения инерционности модели); 36, 37 – амплитудный детектор; 46 – полосовой фильтр, настроенный на частоту манипуляции; 47 – линия задержки; 18 – потенциометр расстояния; 38, 41 – полосовые фильтры поднесущих частот; 42,43 и 39,40 – амплитудные детекторы поднесущих; 44 – компаратор; 45 – фильтр опорного напряжения; 50 – фильтр командного сигнала; 51 – дополнительный усилитель сигнала ошибки.
| Token 36 Parameters: Function: Rectify Zero Point = 0 v Token 37 Parameters: Operator: Linear Sys Butterworth Lowpass IIR 5 Poles Fc = 10e+3 Hz Quant Bits = None Init Cndtn = Transient DSP Mode Disabled Token 46 Parameters: Operator: Linear Sys Chebyshev Bandpass IIR 1 Poles Low Fc = 18 Hz Hi Fc = 22 Hz Quant Bits = None Init Cndtn = 0 DSP Mode Disabled Token 47 Parameters: Operator: Delay Non-Interpolating Delay = 6e-3 sec Output 0 = Delay Output 1 = Delay - dT Token 50 Parameters: Operator: Linear Sys Butterworth Lowpass IIR 3 Poles Fc = 3 Hz Quant Bits = None Init Cndtn = Transient DSP Mode Disabled Token 51 Parameters: Operator: Gain Gain = 5,35 Gain Units = Linear | Token 41 Parameters: Operator: Linear Sys Chebyshev Bandpass IIR 1 Poles Low Fc = 2,95e+3 Hz Hi Fc = 3,05e+3 Hz Quant Bits = None Init Cndtn = 0 DSP Mode Disabled Token 42 Parameters: Function: Rectify Zero Point = 0 v Token 43 Parameters: Operator: Linear Sys Butterworth Lowpass IIR 3 Poles Fc = 100 Hz Quant Bits = None Init Cndtn = Transient DSP Mode Disabled | Token 38 Parameters: Operator: Linear Sys Chebyshev Bandpass IIR 1 Poles Low Fc = 5,95e+3 Hz Hi Fc = 6,05e+3 Hz Quant Bits = None Init Cndtn = 0 DSP Mode Disabled Token 39 Parameters: Function: Rectify Zero Point = 0 v Token 40 Parameters: Operator: Linear Sys Butterworth Lowpass IIR 3 Poles Fc = 100 Hz Quant Bits = None Init Cndtn = Transient DSP Mode Disabled | Token 44 Parameters: Operator: Compare Comparison = '>=' True Output = 10 v False Output = 0 v A Input = t43 Output 0 B Input = t40 Output 0 Token 45 Parameters: Operator: Linear Sys Butterworth Bandpass IIR 1 Poles Low Fc = 18 Hz Hi Fc = 22 Hz Quant Bits = None Init Cndtn = Transient DSP Mode Disabled |
|
|
|
Сигнал, принятый приемной антенной, после усиления и преобразования в ВЧ тракте детектируется амплитудным детектором. Низкочастотная часть приемника разделена на два канала: канал сигнала ошибки и канал опорного сигнала. Сигнал с выхода амплитудного детектора 37 параллельно подается на фильтр сигнала ошибки и фильтры поднесущих частот. С выхода фильтра сигнала ошибки снимается гармоническое колебание, амплитуда которого пропорциональна коэффициенту модуляции mA, то есть угловому отклонению  ЛА от радиозоны, а фаза зависит от направления отклонения. Полосовые фильтры поднесущих частот, компаратор и фильтр опорного сигнала образуют опорный канал. Линия задержки в канале сигнала ошибки нужна из-за неодинаковых аппаратурных задержек в опорном канале и канале сигнала ошибки. Опорный сигнал и сигнал ошибки поступают на фазовый детектор, который осуществляет их перемножение. После фильтра командного сигнала выделяется командное напряжение, величина и знак которого определяется величиной и направлением отклонения ЛА от радиозоны. В данной модели после фильтра командного сигнала стоит еще дополнительный усилитель, для более точной подстройки коэффициента усиления.
ЛА от радиозоны, а фаза зависит от направления отклонения. Полосовые фильтры поднесущих частот, компаратор и фильтр опорного сигнала образуют опорный канал. Линия задержки в канале сигнала ошибки нужна из-за неодинаковых аппаратурных задержек в опорном канале и канале сигнала ошибки. Опорный сигнал и сигнал ошибки поступают на фазовый детектор, который осуществляет их перемножение. После фильтра командного сигнала выделяется командное напряжение, величина и знак которого определяется величиной и направлением отклонения ЛА от радиозоны. В данной модели после фильтра командного сигнала стоит еще дополнительный усилитель, для более точной подстройки коэффициента усиления.
Потенциометр дальности, формирующий командный сигнал Uкх, пропорциональный линейному отклонению ЛА от радиозоны, управляется программным механизмом.
Конструктивные требования к приемнику:
1. Небольшая масса и размеры. Так как приемник находится на борту ЛА, вес и размеры оборудования играют значительную роль.
2. Высокое быстродействие. Задержки в обработке могут привести к потере ЛА.
3. Небольшая стоимость оборудования. Так как подобные системы ставятся обычно на снаряды, их стоимость должна быть как можно более низкой, а технология изготовления – наиболее простой.
4. Низкое энергопотребление. Так как время управление составляет порядка нескольких минут, а питание подается от аккумуляторного источника на борту, мощность потребления системы должна быть минимальной.
|
|
|
5. Минимальная чувствительность к вибрациям, перегрузкам, температуре.
Исходя из этого, при моделировании были использованы наиболее простые элементы. В качестве полосовых фильтров использованы фильтры 1-го порядка, то есть практически резонансные контуры. Усилители можно реализовать при помощи ОУ. Компараторы продаются в виде готовых микросхем. Например, 521СА2. В качестве амплитудных детекторов можно использовать диоды в сочетании с простейшими интегрирующими цепочками 2-3 порядка. Для уменьшения затухания сигнала можно использовать и активные фильтры на ОУ.
Приемная антенна располагается в хвостовой части ЛА, поэтому должна быть небольших размеров (около 30 см).
Временные диаграммы в приемнике.
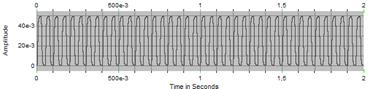
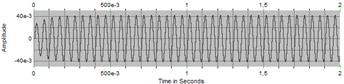
Сигнал на входе приемника

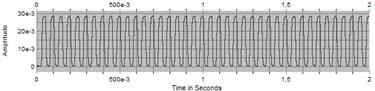
Демодулированный сигнал (выход 37)

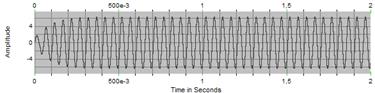
Сигнал на выходе детектора огибающей первой поднесущей (выход 43)
Сигнал на выходе детектора огибающей второй поднесущей (выход 40)
Опорное напряжение (выход 45)
Напряжение на выходе фильтра сигнала ошибки (выход 47)
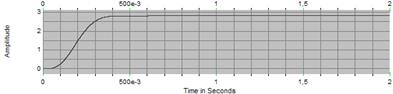
Командный сигнал (выход 51)
Общая схема устройства.
8 – устройство имитации радиолинии. Ослабляет сигнал в зависимости от дальности от ЛА от пункта управления, модулирует сигнал в зависимости от углового отклонения ЛА от радиозоны, добавляет шум в линию связи.
19 – простейшая имитация передаточной функции снаряда. В качестве инерционного звена используется фильтр ФНЧ. Также эта подсистема переводит командное напряжение в отклонение в градусах.
7 – источник, задающий удаление от ЛА до пункта управления (в метрах).
11 – генератор шума в радиолинии.
3, 13, 14 – генератор случайного отклонения снаряда от радиозоны.
5 – генератор заданного отклонения снаряда от радиозоны (в градусах).
29 – переключатель заданного и случайного отклонения снаряда. Управляется источником 6. Если сигнал на выходе 6 равен 1, то отклонение задается вручную; если 0, то генерируется автоматически.
59 – селектор режима работы. Управляется источником 4. Если на выходе системы 0, то система разомкнута; если 1 – замкнута.
Заключение.
|
|
|
Разработанное устройство соответствует заданию. Хотя используемый в нем способ управления прилично устарел и не обладает отличными характеристиками, он все еще остается достаточно удобным, простым и дешевым для вывода летательного аппарата в район нахождения цели.
Список литературы.
1. В.Н. Типугин, В.А. Вейцель. «Радиоуправление». М., «Радио и связь», 1962.
2. «Основы радиоуправления». Под ред. В.А. Вейцеля, В.Н. Типугина. М., «Сов. радио», 1973
3. Паршин В.С., Кулакова М.В. Система управления в радиозоне. Рязань, РГРТУ, 2006.
|
|
|
12 |
