 |


Составить полную и линеаризированную структурные схемы
|
|
|
|
Содержание
1. Составление математического описания системы
1.1 Схема (рис.1) и исходные данные
1.2 Уравнения во временной области и их операторные преобразования. Нахождение передаточных функций для всех элементов системы
1.3 Составить полную и линеаризированную структурные схемы
1.4 Определение численных значений коэффициентов связи и постоянных времени неизменяемой части системы
2. Составление структурной схемы для установившегося режима
2.1 Составление структурной схемы для установившегося режима
2.2 Определение необходимого коэффициента передачи
2.3.Определение значения переменных (Uзад, U2, U3, Ud,Uтг, U1) для режима с заданной частотой nзад
2.4 Определение статических отклонений n частоты вращения вала привода от заданного значения nзад
3. Исследование динамики системы
3.1 Построение аппроксимированной ЛАЧХ системы в разомкнутом состоянии и проверка устойчивости
3.2 Построение желаемой ЛАЧХ системы в разомкнутом состоянии
3.3 Нахождение ЛАЧХ последовательного корректирующего устройства, определение передаточной функции корректирующего устройства
3.4 Расчёт кривой переходного процесса на ЭВМ
Литература
Составление математического описания системы
1.1 Схема (рис.1) и исходные данные
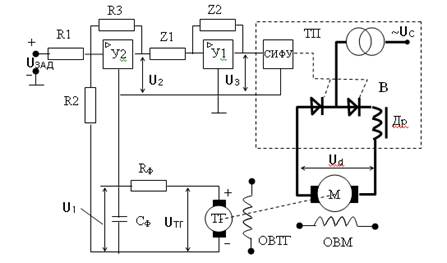
Рисунок 1 - Принципиальная схема.
На рис.1 приведена принципиальная схема замкнутой системы электропривода, состоящего из:
– двигателя постоянного тока независимого возбуждения М;
– тиристорного преобразователя ТП с системой импульсно-фазового управления СИФУ, управляемыми вентилями В и дросселем Др;
– операционного усилителя У1, ре3ализующего устройство коррекции (УК), обеспечивая необходимый из условий статики коэффициент усиления замкнутого контура системы и заданные динамические свойства замкнутой системы;
|
|
|
– сумматора на операционном усилителе У2;
– тахогенератора ТГ с R-C фильтром.
Данные для построения статической характеристики тиристорного преобразователя приведены в таблице 1, емкость конденсатора Cф=20 мкФ, сопротивление Rф=1 кОм фильтра и сопротивления R1=R2=R3=10 êÎì. Паспортные данные электродвигателя М: номинальное напряжение Uн, номинальная скорость nн, номинальный ток Iн, момент инерции J системы электропривода; заданная скорость nзад; данные силовой цепи ТП-Д - сопротивление Rя и индуктивность Lяц якорной цепи, а также коэффициент передачи тахогенератора Ктг, приведены в таблице 2.
Таблица 1. Статическая характеристика ТП.
| Ud, В | 0 | 15 | 50 | 100 | 160 | 200 | 220 | 240 | 250 | 255 | 260 |
| Uз, В | 0 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | 45 | 50 |
Таблица 2. Исходные данные
| Вариант | Данные электродвигателя | Силовая цепь | ТГ | ||||||
| Uн, В | Iн, А | nн, 1/с | Рн, кВт | J, кг×м2 | nзад, 1/с | Rяц, Ом | Lяц, мГн | Kтг, В×с | |
| 25 | 220 | 32,6 | 104,7 | 6 | 0,14 | 42 | 0,76 | 20,2 | 0,286 |

Рисунок 2 - Статическая характеристика ТП.
Уравнения во временной области и их операторные
Преобразования. Нахождение передаточных функций для всех
Элементов системы
Математическое описание системы приводится на основе составления системы дифференциальных уравнений для элементов системы при общепринятых допущениях:
- Электродвигатель постоянного тока независимого возбуждения с рабочей машиной, при допущениях постоянного магнитного потока двигателя, скомпенсированной реакции якоря двигателя, абсолютно жёстких механических соединениях и постоянном моменте инерции J привода, описывается системой уравнений, состоящей из дифференциальных уравнений баланса напряжений якорной цепи и движения привода, а также соотношений между э.д.с. Е и частотой вращения n, электромагнитным моментом М и током I якорной цепи:
|
|
|
 (1)
(1)
где Се - коэффициент, учитывающий магнитный поток и конструктивное исполнение электродвигателя;
в операторной форме система будет выглядеть:
 (1’)
(1’)
При определении передаточной функции электродвигателя за выходную переменную следует принимать частоту, вращения вала n, за входное задающее воздействие - напряжение Ud, в качестве возмущающего воздействия - отклонение напряжении сети DUc. Следует учесть, что динамические свойства электродвигателя характеризуются двумя постоянными времени: электромагнитной  и электромеханической
и электромеханической  . Коэффициент передачи двигателя относительно Ud определяется соотношением Кд=1/Се
. Коэффициент передачи двигателя относительно Ud определяется соотношением Кд=1/Се
 (2)
(2)
На основании системы (1’) можно изобразить структурную схему механической части системы:
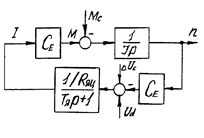
Рисунок 3 – Исходная схема

Рисунок 4 – Преобразованная схема
На рисунке 4 изображена преобразованная схема, где двигатель представлен колебательным звеном, поскольку коэффициент демпфирования 0<x<1.
- Тиристорный преобразователь ТП с СИФУ описывается неоднородным дифференциальным уравнением первого порядка.
 ,(3)
,(3)
где Тп - постоянная времени (Тп=0,05 с);
Kп - коэффициент, определяемый статической характеристикой ТП;
В операторной области уравнение (3) будет выглядеть:
 , (4)
, (4)
откуда
 (5)
(5)
Тогда передаточная функция тиристорного преобразователя:
 (6)
(6)
На основании этого линеаризованная структурная схема будет выглядеть:

Рисунок 5 – Линеаризованная схема
- Операционные усилители звена коррекции и сумматора У1, У2 описываются передаточной функцией:
 ,(7)
,(7)
где Zoc(p) и Zвх(p) - операторные сопротивления цепей обратной связи и входной данного операционного усилителя.
При этом операторное сопротивление активной цепи равно R, емкостной - 1/Cp, индуктивной - Lp. Если на вход операционного усилителя (У2) прикладывается несколько различных воздействий U1, U2, с входными сопротивлениями Z1 и Z2, то операционный усилитель описывается
 ,(8)
,(8)
где
 ,(9)
,(9)
т.е. при Zос= Z1= Z2 операционный усилитель может служить сумматором.

Рисунок 6 – операционный усилитель
|
|
|
- Тахогенератор можно представить в виде линейного безынерционного усилительного звена с передаточным коэффициентом Kтг;

Рисунок 7 – Тахогенератор
Значение выходного напряжение тахогенератора Uтг будет определяться соотношением:
 (10)
(10)
- Фильтр на выходе тахогенератора можно рассматривать как отдельное звено с входным напряжением Uтг и выходным U1.

Рисунок 8 – Фильтр на выходе тахогенератора
Такое допущение основывается на том, что внутреннее сопротивление тахогенератора можно считать пренебрежимо малым, а нагрузочное сопротивление R2 на порядок больше внутреннего сопротивления фильтра. Полярность Uтг подбирается такой, чтобы в установившемся режиме сигнал обратной связи на входе У2 был обратным по знаку сигналу Uзад. Постоянная времени фильтра определяется произведением CфRф.
Выходное напряжение фильтра U1 определяется в соответствии со следующими выражениями:
 (11)
(11)
 (12)
(12)

Составить полную и линеаризированную структурные схемы
В целом рассматриваемая система электропривода представляет собой одноконтурную замкнутую САУ с последовательным корректирующим устройством.
Прямой канал полной структурной схемы САУ включает в себя последовательное соединение звеньев сумматора У2 с входными воздействиями - задающим Uзад и обратной связи U1, и выходным воздействием U2; коррекции У1 с входом U2 и выходом U3; тиристорного преобразователя, состоящего из инерционного звена 1-го порядка с коэффициентом усиления равным единице и безынерционного нелинейного звена с графическим изображением статической характеристики преобразователя, входным воздействием преобразователя служит Uз, а выходным - Ud; электродвигателя с указанными выше воздействиями Ud, n, DUc, Mc.
Канал обратной связи состоит из усилительного звена тахогенератора ТГ с коэффициентам передачи Kтг, входным воздействием n и выходным Uтг и фильтра в виде инерционного звена 1-го порядка.

Рисунок 9 - Полная структурная схема САУ
Линеаризованная структурная схема САУ получается, если полные переменные Х (Uзад, U2, U3, Ud, DUc, I, M, Mc, n, Uтг, U1) представить в виде суммы ХA+DX, где ХA - значения переменных в рабочей точке А статических характеристик звеньев. После сокращения статических составляющих в правой и левой части уравнений звеньев, линеаризованные структурные схемы звеньев отразят зависимость между приращениями выходных и входных переменных (DUзад, DU2, …, DU1). Форма записи передаточных функций линейных звеньев при этом не изменяется, а статические характеристики нелинейных безынерционных звеньев будут представлены в виде коэффициентов динамической линеаризации в рабочей точке.
|
|
|

Рисунок 10 - Линеаризованная структурная схема САУ
|
|
|
