 |


Анализ устойчивости и качества системы управления
|
|
|
|
Для построения переходной характеристики и логарифмических амплитудных и частотных характеристик с помощью LTI необходимо заменить блок PID контроллер на эквивалентную схему, т.к. блок PID не предназначен для работы в составе системы при линеаризации.

Рисунок 2.4.1 Схема САР линейной плотности для снятия переходной характеристики

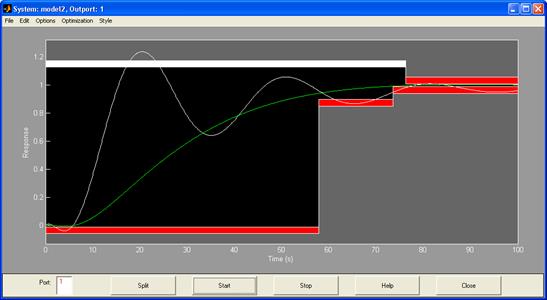
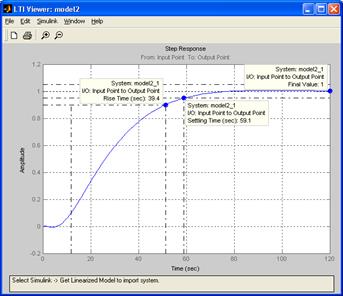
Рисунок 2.4.2 Переходная характеристика САР линейной плотности с введенным и оптимизированным ПИ- регулятором
Из рисунка 2.4.2 видим:
1. Время нарастания – 39.4 с.;
2. Время регулирования – 59.1 с.;
3. Установившееся значение – 1;
4. Перерегулирование – отсутствует.
Для получения логарифмических амплитудных и фазовых характеристик для определения запасов устойчивости и амплитуде и фазе необходимо разомкнуть систему.

Рисунок 2.4.3 Схема разомкнутой САР для снятия логарифмических характеристик

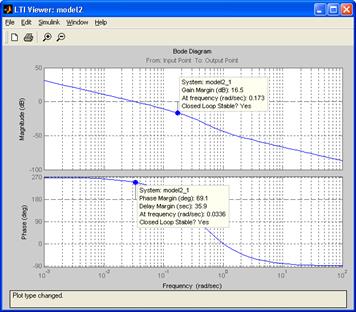
Рисунок 2.4.4 ЛАХ и ЛФХ системы автоматического регулирования линейной плотности
Из рисунка 2.4.4 видим:
1. Запас по амплитуде – 16.5 dB;
2. Запас по фазе – 69.1°.

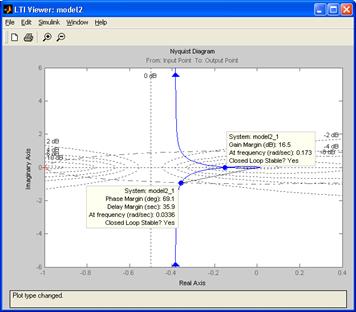
Рисунок 2.4.5 АФЧ системы автоматического регулирования линейной плотности
Заключение
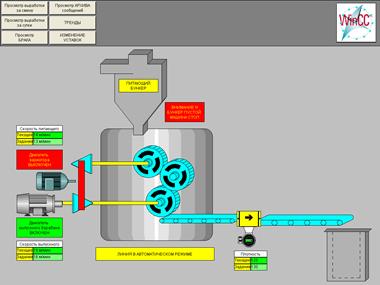
В данной курсовой работе проведена идентификация питающего бункера чесальной машины как объекта автоматического регулирования линейной плотности. Проведена проверка на наблюдаемость и управляемость объекта управления. На основе анализа переходных характеристик объекта управления был выбран наиболее подходящий для данного переходного процесса ПИ – регулятор. Проведена оптимизация настроечных параметров этого регулятора с помощью MATLAB.
В результате введения в систему ПИ-регулятора были получены следующие параметры системы:
|
|
|
· Время переходного процесса 59.1 с.;
· Перерегулирование отсутствует;
· Статическая ошибка – нет;
· Запас по фазе 69.1°;
· Запас по амплитуде 16.5 dB.
Учитывая полученные значения параметров системы можно утверждать, что выполнены все поставленные в задании на курсовую работу требования.
Литература:
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1972. – 412 с.
2. Теория автоматического управления. Под. ред. Ю.М. Соломенцева. М.: Высшая школа, 2003. – 372 с.
3. Воронов А.А. «Основы теории автоматического регулирования и управления». Уч. пособие для вузов. М.: Высш. Школа, 1977.-519стр
4. Варламов И.Г., Чем руководствоваться при принятии решения по выбору закона регулирования (ПИ или ПИД) в процессе наладки САР на предприятии? «Промышленные АСУ и контроллеры. 2005. №11 с.59-60»
5. «Автоматизированные системы обработки информации и управления» под ред. Кескевич И.Л., уч. изд., 1990г.
6. «Автоматические приборы, регуляторы и вычислительные системы» Справочное пособие. Изд 3-е, перераб. и доп. Под ред. Б.Д. Кошарского. Л.: «Машиностроение».1976. 488 с. ил.
7. Чистяков В.С. «Краткий справочник по теплотехническим измерениям».-М.: Энергоатомиздат, 1990.-320 с.
8. ГОСТ 21 404 «Автоматизация технологических процессов. Условные графические обозначения»
9. СНиП 305.07-85 «Автоматизация технологических процессов. Основные положения».
10. Карташова А.Н., Дунин-Барковский И.В. Технологические измерения и приборы в текстильной и легкой промышленности. М., Легкая и пищевая промышленность, 1984 – 312 с
11. Айзенберг Л.Г., Кипнис А.Б., Стороженко Ю.И. Технологические измерения и контрольно-измерительные приборы в текстильной и легкой промышленности. М., Легпромбытиздат, 1990 – 368 с., ил

Структурная схема АСР линейной плотности

Динамический подбор коэффициентов ПИ регулятора с использованием блока NCD
Структурная схема АСР линейной плотности для снятия переходной характеристики
|
|
|

Переходная характеристика АСР линейной плотности
ЛАХ и ЛФХ АСР линейной плотности
АФЧХ АСР линейной плотности
|
|
|
