 |


Проектирования программного обеспечения
|
|
|
|
Разработка схемы алгоритма работы системы и программы
С точки зрения программиста разработанный цифровой тахометр, который состоит из программно доступных регистров микропроцессора и двух портов: порт АЦП и порт индикатора. И вся работа системы заключается в вводе данных из АЦП и их обработка (перевод в двоично-десятичный код), и выводе данных на индикатор.
Прежде чем приступить к разработке программы выполняющей перечисленные действия необходимо определить форматы данных вводимых и выводимых в порты.
Описание алгоритма работы системы и программы
Разработанный алгоритм работы системы представлен на чертеже БГУИ.ХХХХХХ.002.
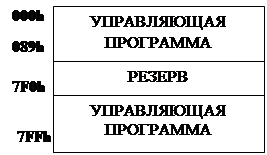
Рисунок 3 – Размещение программы в адресном пространстве микропроцессорной системы
При включении тахометра выполняет начальные установки режимов работы и регистров, ждет прерывания от таймера и сигнального входа. Установки портов - индикатор погашен. Обнуляет счетчик оборотов и таймер 1 секунда. Снимает показания счетчика оборотов. Увеличивается содержимое таймера на 1, следит за реальным временем и записывает результат в буфер индикации. Производит счет входных импульсов + нормировку для обеспечения показаний в оборотах/мин, счет ведется в двоично-десятичном коде, обнуление счетчика при включении и по таймеру после считывания результата.
Заключение
Входе выполнения курсовой работы был разработан цифровой тахметр с автоматическим выбором диапазона измеряемого напряжения.
В пояснительной записке проработаны вопросы соотношения аппаратных и программных средств разрабатываемой системы, разработана и описана структурная и принципиальная схема устройства. Бес внимания не остались вопросы разработки программного обеспечения. В курсовой работе разработан и описан алгоритм функционирования цифрового тахометра. По разработанному алгоритму составлена программа.
|
|
|
Конечным результатом проведенной работы, явилась структурная и принципиальная схема цифрового тахометра, а также алгоритм функционирования системы и листинг программы.
Литература
1. Абрайтис В. -Б. Б., Аверьянов Н. Н., Белоус А. И. и др. Под ред. Шахнова В. А. Микропроцессоры и микропроцессорные комплекты интегральных микросхем: справочник. В 2 т. – М.: Радио и связь, 1988.
2. Богданович М. И., Грель И. Н., Прохоренко В. А., Шалимо В. В. Цифровые интегральные микросхемы: справочник. – Мн.: Беларусь, 1991.
3. Каган Б. М., Сташин В. В. Основы проектирования микропроцессорных устройств автоматики. – М.: Энергоатомиздат, 1987.
4. Тарабрин Б. В., Лунин Л. Ф., Смирнов Ю. Н и др. Под ред. Тарабрина Б. В. Интегральные микросхемы: справочник. – М.: Радио и связь, 1984.
5. Фридмен М., Ивенс Л. Проектирование систем с микрокомпьютерами: пер. с англ. – М.: Мир, 1986.
Приложение А
Листинг управляющей программы
;******Стандартная шапка******************
list p=16f84, f=inhx8m; *
#include p16f84.inc; *
;*****************************************
;-------буфер индикатора-----------
INR EQU H'0C'; номер текущего разряда
IKANB EQU H'0D'; косвен. адрес начала буфера
IR0 EQU H'0D'; разряд 0
IR1 EQU H'0E'; разряд 1
IR2 EQU H'0F'; разряд 2
IR3 EQU H'10'; разряд 3
;--------таймер---------------------------------
TIM0 EQU H'11'; младший байт
TIM1 EQU H'12'; старший байт
TIMF EQU H'00'; флаг переполнения таймера
;-счетчик входных импульсов - работа по прерыванию---
OB0 EQU H'13';
OB1 EQU H'14';
DOB EQU H'15'; приращение счетчика импусов
;---------------------------------------------
org 0
goto Begin
org 4
goto Int
;----------------подпрограммы------------------------
Table1
;-перекодировка двоично-десятичного числа
; в семисегментный код
|
|
|
; перед вызовом программы в W загрузить преобразуемое число
; результат после выполнения программы - в W
addwf PCL
retlw H'7F'; 0
retlw H'0D'; 1
retlw H'B7'; 2
retlw H'9F'; 3
retlw H'CD' ; 4
retlw H'DB' ; 5
retlw H'FB'; 6
retlw H'0F'; 7
retlw H'FF'; 8
retlw H'DF'; 9
retlw H'01'; пусто
;-----------------------------------------------
Table2
;-сканирование разряда индикатора
; перед вызовом программы в W загрузить текущий номер раз-да
; результат после выполнения программы - в W
addwf PCL
retlw H'0E'; 0
retlw H'0D'; 1
retlw H'0B'; 2
retlw H'07'; 3
;----------------------------------------------------
Indic
;-обслуживание индикатора------
; коррекция TMR0
; при обращении преобразует число текущего разряда
; в семисегментный код, и производит его подсветку
; затем производит смещение указателя
; текущего разряда на 1 в пределах 0...3
movlw 0xF1
movwf TMR0; коррекция TMR0
bcf STATUS,RP0 ; банк 0
movlw 0xFF ; погасить индикатор
movwf PORTA;
movlw IKANB
addwf INR,0 ; вычисление косвенного адреса разряда
movwf FSR
movf INDF,0 ; код числа разряда - в W
call Table1
movwf PORTB; семисегментный код - на индикатор
movf INR,0
call Table2
movwf PORTA; подсветка разряда
incf INR,1;
btfsc INR,H'02';
clrf INR; INR=INR+1
return
;------------------------------------------------------------
Sum
;-производит счет входных импульсов + нормировку для
; обеспечения показаний в оборотах/мин.
; счет ведется в двоично-десятичном коде
; обнуление счетчика при включении и по таймеру после
; считывания результата
bcf STATUS,RP0 ; банк 0
; задание приращения счетчика импульсов
movlw 0x1; *!!! в десятичном виде!!!!!!
movwf DOB
; ----------
movlw 0x0F ;
andwf DOB,0;
addwf OB0,1 ; добавить младшую тетраду приращения
btfss STATUS,DC ;
goto Metka2 ;--------------------------
movlw 0x06 ;
addwf OB0,1 ; коррекция при переносе из 3 в 4
goto Metka3 ;--------------------
Metka2 movlw 0x06 ; проверка и коррекция
addwf OB0,0 ; недопустимой комбинации
btfss STATUS,DC ; первой тетрады
goto Metka4 ; выход в конец процедуры!!!!!!!
movwf OB0 ;--------------------------
Metka3 ;проверка и коррекция недопустимой комбинации II тетр.
movlw 0x1;*
addwf OB0,0 ;
btfss STATUS,C;
goto Metka4 ;!!!!!!!!!!
movwf OB0
incf OB1,1;
; проверка и коррекция I тетрады II байта
movlw 0x06
addwf OB1,0
btfss STATUS,DC
goto Metka4
movwf OB1
; проверка II тетрады
movlw 0x1;*
addwf OB1,0
btfss STATUS,C
goto Metka4
movwf OB1
Metka4 ; Добавить старшую тетраду приращения
movlw 0xF0
andwf DOB,0
addwf OB0,1
btfss STATUS,C
goto Metka5
movlw 0x1;*
addwf OB0,1
goto Metka6
Metka5
movlw 0x1;*
addwf OB0,0
btfss STATUS,C
goto Metka7
movwf OB0
Metka6
incf OB1
movlw 0x06
addwf OB1,0
btfss STATUS,DC
goto Metka7
movwf OB1
|
|
|
movlw 0x1;*
addwf OB1,0
btfss STATUS,C
goto Metka7
movwf OB1
Metka7
bcf INTCON,INTF ; сброс флага прерывания
return
;--------------------------------------------------
Taim
; вызывает программу Indic
;-увеличивает содержимое таймера на 1
; следит за реальным временем:
; и вызывает программу Result
call Indic
bcf STATUS,RP0 ; банк 0
incfsz TIM0,1
goto Metka0
incf TIM1,1
Metka0 btfsc TIM1,TIMF
call Result
bcf INTCON,T0IF ; сброс флага прерывания
return
;---------------------------------------------------
Result
;-снимает показания счетчика оборотов,
; записывает результат в буфер индикации
bcf STATUS,RP0 ; банк 0
movlw H'0F'
andwf OB0,0
movwf IR0
swapf OB0,0
andlw 0x0F
movwf IR1
movlw H'0F'
andwf OB1,0
movwf IR2
swapf OB1,0
andlw 0x0F
movwf IR3
; гасит незначащие нули на индикаторе
movf IR3,1
btfss STATUS,Z
goto Metka1
movlw 0x0A
movwf IR3
movf IR2,1
btfss STATUS,Z
goto Metka1
movlw 0x0A
movwf IR2
movf IR1,1
btfss STATUS,Z
goto Metka1
movlw 0x0A
movwf IR1
; обнуляет счетчик оборотов и таймер 1 секунда
Metka1 clrf OB0
clrf OB1
clrf TIM0
clrf TIM1
return
;-----------------------------------------------------
Int
;-начало подпрограммы обработки прерываний-----
;-прерывания возможны от таймера и от входа INT0
;-задача - определить причину прерывания и вызвать
;-соответствующую подпрограмму - Taim или Sum
btfsc INTCON,INTF
call Sum
btfsc INTCON,T0IF
call Taim
retfie
;-------------------------------------------------
Begin
;-----начало основной программы-----------------
; выпоняет начальные установки режимов работы и регистров
; ждет прерывания от таймера и сигнального входа
bcf STATUS,RP0 ; банк 0
; установки портов - индикатор погашен
clrf PORTB
movlw 0xFF
movwf PORTA
; установки режимов работы
bsf STATUS,RP0 ; банк 1
movlw 0x10
movwf TRISA
movlw 0x01
movwf TRISB
; bcf OPTION_REG,PS0;
bcf OPTION_REG,PS2; коэффициет деления 1:16
bcf OPTION_REG,PSA ; предв. делитель перед TMRO
bcf OPTION_REG,T0CS ; внутреннее тактирование TMRO
;!!!!!!!bcf OPTION_REG,NOT_RBPU; включить подтяг. рез-ры
bcf STATUS,RP0 ; банк 0
; сброс таймера
clrf TMR0
clrf TIM0
clrf TIM1
; сброс счетчика входных импульсов
clrf OB0
clrf OB1
; сброс буфера индикации
clrf INR
clrf IR0
clrf IR1
clrf IR2
clrf IR3
movlw 0xB0 ; сброс всех флагов прерывания
movwf INTCON; разрешить прер-я от таймера и входа
;----------------------------------------
Wait goto Wait; ожидание прерывания
;------------------------------------------------------------
end
|
|
|
