 |


Нестабильность часов приемника
|
|
|
|
Введение
Идея создания спутниковой навигации родилась ещё в 50-е годы. В тот момент, когда СССР был запущен первый искусственный спутник Земли, американские учёные во главе с Ричардом Кершнером, наблюдали сигнал, исходящий от советского спутника и обнаружили, что благодаря эффекту Доплера частота принимаемого сигнала увеличивается при приближении спутника и уменьшается при его отдалении. Суть открытия заключалась в том, что если Вы точно знаете свои координаты на Земле, то становится возможным измерить положение спутника, и наоборот, точно зная положение спутника, можно определить собственные координаты.
Реализована эта идея была через 20 лет. Первый тестовый спутник выведен на орбиту 14 июля 1974 г. США, а последний из всех 24 спутников, необходимых для полного покрытия земной поверхности, был выведен на орбиту в 1993 г., таким образом Глобальная система позиционирования или сокращённо GPS встала на вооружение. Стало возможным использовать GPS для точного наведения ракет на неподвижные, а затем и на подвижные объекты в воздухе и на земле. Также с помощью системы вмонтированной в спутники стало реально определять мощные ядерные заряды, находящиеся на поверхности планеты.
Первоначально GPS – глобальная система позиционирования, разрабатывалась как чисто военный проект. Но после того, как в 1983 г. был сбит вторгшийся в воздушное пространство Советского Союза самолёт Корейских Авиалиний с 269 пассажирами на борту, президент США Рональд Рейган разрешил частичное использование системы навигации для гражданских целей. Но точность была уменьшена специальным алгоритмом.
Затем появилась информация о том, что некоторые компании расшифровали алгоритм уменьшения точности и с успехом компенсируют эту составляющую ошибки, и в 2000 г. это загрубление точности было отменено указом президента США.
|
|
|
Спутниковая система навигации
Спутниковая система навигации – комплексная электронно-техническая система, состоящая из совокупности наземного и космического оборудования, предназначенная для определения местоположения (географических координат и высоты), а также параметров движения (скороти и направлення движения и т.д.) для наземных, водных и воздушных объектов.
Что такое GPS?
Спутниковая навигационная система GPS была изначально разработана США для использования в военных целях. Другое известное название системы – «NAVSTAR». Ставшее уже нарицательным название «GPS» является сокращением от Global Positioning System, которое переводится, как Глобальная Навигационная Система. Это название полностью характеризуется предназначение системы – обеспечение навигации на всей территории Земного шара. Не только на суше, но и на море и в воздухе. Используя навигационные сигналы системы GPS, любой пользователь может определить свое текущее местоположение с высокой точностью.
Такая точность, во многом, стала возможной благодаря шагам Американского правительства, которое в 2000 году сделало систему GPS доступной и открытой для гражданских пользователей. Напомним, что ранее с помощью специального режима избирательного доступа (SA – Selective Availability) в передаваемый сигнал вносились искажения, снижающие точность позиционирования до 70–100 метров. С 1 мая 2000 года, этот режим был отключен и точность повысилась до 3–10 метров.
Фактически, это событие дало мощный импульс для развития бытовой навигационной GPS аппаратуры, снижению ее стоимости, и активной ее популяризации среди обычных пользователей. На текущий момент, GPS приемники разных типов активно применяются во всех областях человеческой деятельности, начиная от обычной навигации, заканчивая персональным контролем и увлекательными играми, типа «Geocaching». По результатам многих исследований, использование навигационных GPS систем дает большой экономический эффект для мировой экономики и экологии – повышается безопасность движения, улучшается дорожная ситуация, уменьшается расход топлива, снижается количество вредных выбросов в атмосферу.
|
|
|
Растущая зависимость европейской экономики от системы GPS, и, как следствие, от администрации США, вынудила Европу начать разработку собственной навигационной системы – Galilleo. Новая система во многом похожа на систему GPS.
Состав системы GPS
Космический сегмент
Космический сегмент системы GPS состоит из орбитальной группировки спутников, излучающих навигационные сигналы. Спутники расположены на 6-и орбитах на высоте около 20000 км. Период обращения спутников составляет 12 часов и скорость около 3 км/c. Таким образом, за сутки, каждый спутник совершает два полных оборота вокруг Земли.
Первый спутник был запущен в феврале 1978 года. Его размер с раскрытыми солнечными батареями равнялся 5 метрам, а вес – более 900 кг. Это был спутник первой модификации GPS-I. За последние 30 лет, на орбите сменилось несколько модификаций GPS спутников: GPS II-A, GPS II-R, GPS IIR-M. В процессе модернизации снижался вес спутников, улучшалось стабильность бортовых часов, повышалась надежность.
GPS спутники передают три навигационных сигнала на двух частотах L1 и L2. «Гражданский» сигнал C/A, передаваемый на частоте L1 (1575.42 МГц), доступен всем пользователям, и обеспечивает точность позиционирования 3–10 метров. Высокоточный «военный» P-код, передается на частотах L1 и L2 (1227.60 МГц) и его точность на порядок выше «гражданского» сигнала. Использование сигнала, передаваемого на двух разных частотах, позволяет также частично компенсировать ионосферные задержки.
В последней модификации спутников «GPS IIR-М» реализован новый «гражданский» сигнал L2C, призванный повысить точность GPS измерений.
Идентификация навигационных сигналов осуществляется по номеру, соответствующему «псевдошумовому коду», уникального для каждого спутника. В технической спецификации GPS системы изначально было заложено 32 кода. На этапе разработки системы и начальном периоде ее эксплуатации, планировалось, что количество рабочих спутников не будет превышать 24-х. Свободные коды выделялись для новых GPS спутников, находящихся на этапе ввода в эксплуатацию. И этого количества было достаточно для нормального функционирования системы. Но в настоящее время, на орбите находится уже 32 спутника, из которых 31 функционирует в рабочем режиме, передавая навигационный сигнал на Землю.
|
|
|
«Избыточность» спутников позволяет обеспечить пользователю вычисление позиции в условиях, где «видимость» неба ограничена высотными зданиями, деревьями или горами.
Наземный сегмент
Наземный сегмент системы GPS состоит из 5-и контрольных станций и главной станции управления, расположенных на военных базах США – на островах Кваджалейн и Гавайях в Тихом океане, на острове Вознесенья, на острове Диего-Гарсия в Индийском океане и в Колорадо-Спрингс, они преведены на рисунке 1. В задачи станций мониторинга входит прием и измерение навигационных сигналов поступающих с GPS спутников, вычисление различного рода ошибок и передача этих данных на станцию управления. Совместная обработка полученных данных позволяет вычислить отклонение траекторий спутников от заданных орбит, временные сдвиги бортовых часов и ошибки в навигационных сообщениях. Мониторинг состояния GPS спутников происходит практически непрерывно. «Загрузка» навигационных данных, состоящих из прогнозируемых орбит и поправок часов для каждого из спутников, осуществляется каждые 24 часа, в момент, когда он находится в зоне доступа станции управления.
В дополнение к наземным GPS станциям существует несколько частных и государственных сетей слежения, которые выполняют измерения навигационных GPS сигналов для уточнения параметров атмосферы и траекторий движения спутников.

Рисунок 1
Аппаратура пользователей
Под аппаратурой пользователя подразумевают навигационные приемники, которые используют сигнал со спутников GPS для вычисления текущей позиции, скорости и времени. Пользовательскую аппаратуру можно разделить на «бытовую» и «профессиональную». Во многом этом разделение условное, так как иногда достаточно трудно определить, к какой категории следует отнести GPS приемник и какие критерии при этом использовать. Есть целых класс GPS навигаторов, использующихся в пеших походах, автомобильных путешествиях, на рыбалке и т.п. Есть авиационные и морские навигационные системы, которые зачастую входят в состав сложных навигационных комплексов. В последнее время широкое распространение получили GPS чипы, которые интегрируются в КПК, телефоны и другие мобильные устройства.
|
|
|
Поэтому в навигации б о льшее распространение получило деление GPS приемников на «кодовые» и «фазовые». В первом случае, для вычисления позиции используется информация, передаваемая в навигационных сообщениях. К этой категории относится большинство недорогих GPS навигаторов, стоимостью 100–2000 долларов.
Вторая категория навигационных GPS приемников использует не только данные, содержащиеся в навигационных сообщениях, но и фазу несущего сигнала. В большинстве случаев это дорогостоящие одно- и двухчастотные (L1 и L2) геодезические приемники, способные вычислять позицию с относительной точностью в несколько сантиметров и даже миллиметров. Такая точность достигается в RTK режиме, при совместной обработке измерений GPS приемника и данных базовой станции. Стоимость таких устройств может составлять десятки тысяч долларов.
Работа GPS-навигатор а
Основной принцип, лежащий в основе всей системы GPS, прост и давно используется для навигации и ориентирования: если вы точно знаете местоположение какого-либо реперного ориентира и расстояние до него, то можно начертить окружность (в 3-х мерном случае – сферу), на которой должна быть расположена точка вашего положения. На практике, если вышеуказанное расстояние, т.е. радиус, достаточно велик, то можно заменить дугу окружности отрезком прямой линии. Если провести несколько таких линий, соответствующих разным реперным ориентирам, то точка их пересечения укажет ваше местоположение. В GPS роль таких реперов играют две дюжины спутников, движущихся каждый по своей орбите на высоте ~ 17 000 км над поверхностью Земли. Скорость их движения весьма велика, однако параметры орбиты и их текущее местонахождение с высокой точностью известны бортовым компьютерам. Важной частью любого GPS-навигатора является обычный приемник, работающий на фиксированной частоте и постоянно «прослушивающий» сигналы, передаваемые этими спутниками. Каждый из спутников постоянно излучает радиосигнал, в котором содержатся данные о параметрах его орбиты, состоянии бортового оборудования и о точном времени. Изо всей этой информации данные о точном бортовом времени являются наиболее важными: GPS-приемник с помощью встроенного процессора вычисляет промежуток времени между посылкой и получением сигнала, затем умножает его на скорость распространения радиоволн и т.о. узнает расстояние между спутником и приемником.
|
|
|
Нестабильность часов приемника
Из описанного выше принципа видно, что для определения местоположения достаточно поймать сигналы от двух спутников и построить две пересекающиеся прямые. Однако на практике точность такого метода была бы недостаточной из-за наличия ошибки часов приемника. Дело в том, что спутники, находящиеся на орбите, имеют на борту очень точные и, естественно, дорогостоящие атомные часы. Что же касается GPS-приемников, особенно бытовых, то использование таких часов было бы неоправдано в смысле габаритов и стоимости. Это было одной из серьезных проблем, с которыми столкнулись разработчики – ведь неточность хода часов всего в одну тысячную секунды приводила бы к ошибке более 250 км! Для решения этой проблемы и для возможности использования в GPS-приемниках обычных кварцевых часов (аналогичных тем, которые используются в быту) было предложено использовать не два, а три реперных ориентира, т.е. три пересекающиеся прямые. Как же это работает?
Предположим, что часы GPS-радиоприемника немного спешат, т.е. измеренное время прохождения радиоволн будет больше реального. Это означает, что обе расчитанные линии, и, следовательно, точка их пересечения будут находиться на большем расстоянии от ориентиров (спутников), чем на самом деле. Если же часы отстают, то точка пересечения переместится ближе к спутникам. Возмем теперь третий ориентир (спутник). Легко видеть, что пересечение трех линий даст нам треугольник, размеры и положение которого могут меняться в зависимости от хода часов. Более того, учитывая, что неточность часов для всех трех сигналов будет практически одинаковой, можно автоматически подобрать такую величину коррекции, которая обеспечит пересечение всех трех линий в одной искомой точке.
Принцип действия GPS
Принцип действия спутниковой GPS навигации основан на определении расстояния от текущего положения до группы спутников. Точное местоположение GPS спутников известно из данных эфемерид и альманаха, передаваемых в навигационных сообщениях. Зная расстояние до трех спутников, можно определить текущее местоположение, как точку пересечение трёх окружностей (рисунок 2). Расстояние до спутников определяется простым уравнением
R = t × c,
где t– время распространения радиосигнала от спутника до наблюдателя, а с – постоянная величина, равная скорости света. Соответственно, зная время, за которое сигнал дошел от спутника до GPS приемника и, умножив ее на скорость света, можно определить расстояние.
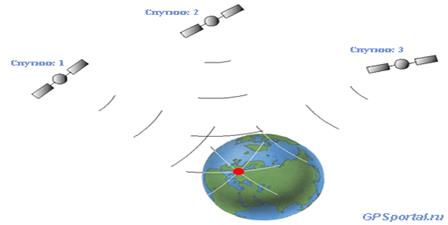
Рисунок 2
Чтобы определить момент, в который сигнал был «отправлен» со спутника, навигационное сообщение модулируется «псевдошумовым» PRN-кодом, соответствующим номеру спутника. Аналогичная последовательность генерируется в GPS приемнике в строгой временной синхронизации с кодом спутника. Принятый со спутника код сравнивается с кодом приемника, и определяется «как давно» в приемнике была сгенерирована схожая последовательность. Выявленный таким образом сдвиг одного кода по отношению к другому будет соответствовать времени прохождения сигналом расстояния от спутника до приемника. Преимуществом кодовых посылок является то, что измерения временного сдвига могут быть проведены в любой момент времени.
Стоит отметить, что для точного вычисления расстояния часы GPS приемника и GPS спутника должны быть синхронизированы с высокой точностью. Потому что отличие даже в несколько микросекунд приводят к ошибке в несколько десятков километров, а это в свою очередь вносит погрешность в вычисление позиции.
Но если на GPS спутниках установлены атомные часы, имеющие очень высокую точность и стоимость которых составляет несколько сотен тысяч долларов, то в обычных GPS навигаторах использование таких дорогих источников частоты просто невозможно. В GPS навигаторах используются недорогие кварцевые генераторы, которые имеют существенно меньшую точность. Поэтому для вычисления «уходов» кварца при решении навигационной задачи используются измерения 4-го спутника. Фактически, получается задача с 4-мя неизвестными – координатами X, Y, Z и временем T. Именно по этой причине измеренное расстояние до спутников называют «псевдодальностью», подразумевая, что оно содержит ошибку связанную с неточностью часов. В настоящее время, многоканальные GPS навигаторы одновременно отслеживают до 8–10 спутников, что позволяет быстро решить большинство неоднозначностей.
Информацию о местоположении спутников GPS приемники получают из передаваемых в навигационных сообщений данных альманаха и эфемерид. Альманах содержит информацию о расположение спутников «на небе», что позволяет при очередном включении GPS прибора значительно сузить секторы поиска навигационного сигнала и уменьшить время его «захвата». Точные координаты спутников вычисляются на основании данных эфемерид. В отличие от альманаха, спутник передает только данные «своих» эфемерид, поэтому для его использования в подсчете позиции, GPS приемник должен получить полное навигационное сообщение. Ошибки передачи, связанные с «плохими» окружающими условиями, могут существенно увеличить время фиксации позиции. Наличие в памяти данных альманаха и эфемерид позволяет GPS приемнику определять позицию за 1–2 секунды. Этот режим называется «горячим»стартом.
Геометрический фактор определяет относительное расположение GPS приемника и спутников, используемых в подсчете позиции. Его величина влияет на точность определения позиции. Если все спутники расположены в одном направлении от GPS приемника, то площадь пересечения всех окружностей будет достаточно большой. Эта площадь характеризует величину неопределенности измерений, влияющих на точность подсчёта и позиции (рисунок 3).

Рисунок 3
В случае, когда спутники расположены «вокруг» GPS приемника, область пересечений окружностей и соответственно величина неопределённостей умньшаются (рисунок 4).

Рисунок 4
Точность системы
Учитывая вышесказанное, мы видим, что для устранения нестабильности хода часов приемника и определения точного местоположения в двумерном пространстве (т.е. по широте и долготе) нам необходимо получить сигналы мимнимум от 3-х спутников. К счастью, сегодня количество GPS-спутников достаточно велико даже для того, чтобы в любой точке земного шара определить не только двумерные, но и трехмерные координаты – широту, долготу и высоту над уровнем моря. Для этого нужно получать сигналы минимум от 4-х спутников. При этом, чем больше спутников «видит» Ваш GPS – приемник, тем точнее он может определить координаты местоположения – вплоть до максимального предела, определяемого точностью системы. Из этого, в частности, следует, что точность работы GPS-навигатора снижается, если сигналы от некоторых спутников экранируются местными предметами (рельефом местности, деревьями с плотной кроной, высокими зданиями и т.п.).
Как известно, спутниковая GPS-система оплачивается и находится под контролем Департамента обороны США, который зарезервировал предельную точность исключительно для своих военных целей. Для этого передаваемый спутниками сигнал кодируется с помощью специального Р-кода, который может быть декодирован только военными GPS-приемниками. В дополнение к этому, в сигналы времени от спутниковых атомных часов добавляется случайная ошибка, которая искажает полученные значения координат. В результате точность гражданских GPS-премников ухудшается более чем в 10 раз по сравнению с военными и составляет около 50–150 м.
В действительности, на практике все выглядит несколько сложнее, чем в теории. Это объясняется влиянием на GPS измерения различного рода ошибок. Можно выделить три категории ошибок (рисунок 5):
· Ошибки системы.
· Ошибки связанны с распространением навигационного сигнала.
· Ошибки приемной аппаратуры.

Рисунок 5
Ошибки системы связаны точностью атомных часов спутников и соответствием реальной траектории спутников заданной орбите. Несмотря на то, что в каждом GPS спутнике используются высокоточные атомные часы, они тоже могут содержать ошибки и отклоняться от истинного значения системного эталона времени. Отклонение в 30 нс ведет к ошибке определения расстояния в 10 метров. Поэтому, все отклонения бортовых часов отслеживаются и их значения передаются в составе навигационных сообщений и учитываются GPS приемником в вычислениях позиции.
Второй тип системных ошибок связан с неточностью передаваемых эфемерид. В математической модели учитываются множество факторов, влияющих на изменение траектории орбит GPS спутников, но небольшие ошибки все равно присутствуют.
Наиболее существенный вклад в навигационные измерения вносят ошибки, связанные с распространением сигнала атмосфере Земли, а именно в ионосферных и тропосферных ее слоях. Ионосфера Земли представляет собой слой заряженных частиц на высоте от 120 до 200 км. Эти частицы снижают скорость распространения сигнала, и, следовательно, увеличивают его время. Соответственно вносится ошибка в оценку расстояния от GPS приемника до спутника. Эти задержки могут быть смоделированы для разного времени суток, усреднены и внесены в измерения, но, к сожалению, эти модели не могут точно отобразить реальную ситуацию. После прохождения ионосферного слоя, навигационный сигнал попадает в тропосферный слой, в котором происходят все погодные явления и присутствуют водяные пары, также влияющее на скорость распространения сигнала. Для борьбы с ионосферными задержками используют дифференциальные метод определения позиции. Корректирующие поправки передаются с помощью геостационарных спутников WAAS/EGNOS и позволяют повысить точность позиционирования до 1 метра.
Ошибки многолучевости можно одновременно отнести и к категории ошибок, связанных с распространением навигационного GPS сигнала, и к ошибкам GPS приемника. Ошибка многолучевости связана с переотражением навигационного сигнала от близкорасположенных объектов – зданий, металлических конструкций, деревьев и т.п. (рисунок 6). В результате этого эффекта время распространения отраженного сигнала превышает время «прямого» сигнала. Если уровень переотраженного сигнала выше уровня «прямого» сигнала, то происходит ошибочный «захват», и в результате, вносится ошибка в вычисления расстояния до спутника.
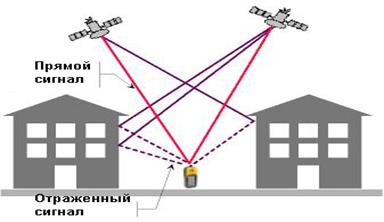
Рисунок 6
Дифференциальная GPS
Для того, чтобы в ряде случаем можно было «обойти» ограничения, наложенные Департаментом обороны США, некоторые специальные службы (например, береговая охрана США) установили сеть фиксированных т.н. «дифференциальных» радио-буев. Каждый из них постоянно регистрирует сигналы GPS-спутников и сравнивает расчитанные координаты со своим известным постоянным местоположением. Вычисленная таким образом ошибка передается радио-буем на фиксированной частоте (обычно в 2-х метровом диапазоне) в виде специального сигнала. Если этот сигнал поймать с помощью дополнительного т.н. «дифференциального» приемника, подключенного к GPS-навигатору, то последний может внести соответствующую поправку и определить координаты с точностью около 1 метра. В последнее время такие службы получают все большее распространение в западных странах, однако их услуги часто бывают платными.
Современное состояние
В настоящее время работают или готовятся к развёртыванию следующие системы спутниковой навигации:
· NAVSTAR (GPS)
Принадлежит министерству обороны США, что считается другими государствами её главным недостатком. Более известна под названием GPS. Единственная полностью работающая спутниковая навигационная система.
· ГЛОНАСС
Глобальная навигационная спутниковая система (ГЛОНАСС) – советская и российская спутниковая система навигации, разработанная по заказу Министерства обороны СССР.
Принадлежит министерству обороны России. Является попыткой восстановить функционировавшую с 1982 года советскую систему. Находится на этапе повторного развёртывания спутниковой группировки (оптимальное состояние орбитальной группировки спутников, запущенных в СССР, было в 1993–1995 гг.). Современная система, по заявлениям разработчиков наземного оборудования, будет обладать некоторыми техническими преимуществами по сравнению с NAVSTAR. Однако в настоящее время эти утверждения проверить невозможно ввиду недостаточности спутниковой группировки и отсутствия доступного клиентского оборудования.
Основой системы должны являться 24 спутника, движущихся над поверхностью Земли в трёх орбитальных плоскостях с наклонением 64,8° и высотой 19100 км. Принцип измерения аналогичен американской системе навигации NAVSTAR.
· Бэйдоу
Развёртываемая в настоящее время Китаем подсистема GNSS, предназначенная для использования только в этой стране. Особенность – небольшое количество спутников, находящихся на геостационарной орбите.
· Galileo
Европейская система, находящаяся на этапе создания спутниковой группировки.
· IRNSS
Индийская навигационная спутниковая система, в состоянии разработки. Предполагается для использования только в этой стране. Запуск первого спутника ожидается в 2009 году.
|
|
|
