 |


20. Общие сведения и характеристики первичных измерительных преаброзователей.
|
|
|
|
Первичные измерительные преобразователи (датчики) во многом определяют качество средств измерений, и знание их характеристик является весьма важным при разработке и использовании этих средств. Характеристики первичных измерительных преобразователей разделяются на статические и динамические.
Статические характеристики возникают при статическом режиме работы ПИП. Статический режим работы – это такой режим, при котором ПИП воспринимает изменение входной величины и размеры измеряемой величины не изменяются во времени.
К основным статическим характеристикам ПИП относятся:
1) статическая характеристика (функция) преобразования;
2) чувствительность (коэффициент преобразования);
3) диапазон восприятия и преобразования входной величины;
4) погрешность восприятия и преобразования;
5) потребляемая мощность;
6) входное и выходное сопротивления и др.
Динамические характеристики ПИП возникают при динамическом режиме его работы. Динамический режим работы – это такой режим, при котором ПИП воспринимает изменение входной величины и размеры измеряемой величины изменяются во времени.
К динамическим характеристикам относятся:
1) передаточная функция;
2) переходная характеристика;
3) амплитудно-частотная характеристика;
4) фазочастотная характеристика;
5) динамическая погрешность;
6) постоянная времени и др.
Статические характеристики ПИП:
В общем случаестатическаяхарактеристика (функция, уравнение) преобразования ПИП Y =f(X) представляет связь между входной и выходной величинами и ее линейность.
Часто зависимость между значениями величин на входе и выходе ПИП, полученную экспериментально, называют градуировочной характеристикой.
Градуировочная характеристика датчика может быть линейной или нелинейной. Чаще всего стремятся иметь линейную зависимость, т. е.
Y =KX, которая может проходить как через начало координат (Х = 0;
Y = 0), так и иметь смещение по оси Х или Y (например, Y = 0 при X = X0 ).
Для ПИП (датчиков) нормируется номинальная статическая градуировочная характеристика, которая приписывается преобразователю (датчику) на основе анализа совокупности таких преобразователей (датчиков).
При градуировке серии однотипных ПИП реальные функции преобразования каждого ПИП могут отличаться от паспортной (номинальной), образуя полосу неопределенности.
Реальная функция преобразования YP = fP(X) – это функция, которую имеет ПИП в действительности.
Характеристика преобразования измерительного преобразователя должна определяться для нескольких значений входной величины, чаще всего для трех: Х = 0; Х/ХВ = 1/2; Х/ХВ = 1 (ХВ – верхний предел преобразования ПИП). В случае нелинейной характеристик число значений входной величины должно быть больше.
Чувствительность ПИП – это свойство ПИП, определяемое отношением изменения выходного сигнала этого преобразователя к вызывающему его изменению входной величины.
Различают абсолютную и относительную чувствительность. В общем случае абсолютную чувствительность определяют как
|
|
|

|
Эта величина является размерной и зависит от единиц, в которых выражаются входная X и выходная Y величины (например, для терморезистивного ПИП размерность абсолютной чувствительности будет Ом/К).
В практике пользуются относительной чувствительностью

|
Dгде X/X – относительное изменение входной величины, выражаемое чаще всего в процентах. Относительная чувствительность S0 имеет размерность выходной величины на 1 % изменения входной величины.
Применяют также формулу относительной чувствительности в виде

|
выражая числитель и знаменатель чаще всего в процентах (например, 1 % изменения величины Х вызывает изменение Y на n %).
Для нелинейной характеристики преобразования чувствительность S не является постоянной и определяется для каждого конкретного значения входной величины х0. Ее можно представить в виде
|
|
|

|
Порог чувствительности – это характеристика преобразователя в виде наименьшего значения изменения входной физической величины, начиная с которого может осуществляться ее преобразование (измерение) данным преобразователем (датчиком).
Порог чувствительности датчика можно также определить, как максимальное изменение входной величины, которое не вызывает обнаруживаемого изменения выходного сигнала преобразователя.
Диапазон значений входной величины, в пределах которого ее изменения не вызывают выходного сигнала ПИП (датчика) называют зоной нечувствительности преобразователя. Иногда эту зону называют мертвой.
Диапазон восприятия и преобразования входной величины – область значений входной величины, которые ПИП (датчик) может преобразовать в выходной сигнал, не выходя за пределы допустимых погрешностей. Различают полный и рабочий диапазоны.
Полный диапазон – это диапазон значений входной величины, который датчик может преобразовать с погрешностью не превышающей 100 %.
Рабочий диапазон – это часть полного диапазона, в котором относительная погрешность преобразования, не превышает некоторого заданного значения.
Значения величины, ограничивающие диапазон преобразования снизу и сверху, называют соответственно нижним и верхним пределами преобразования.
Нижний предел преобразования реально не бывает равным нулю, так как он ограничивается обычно порогом чувствительности, помехами или погрешностями преобразования.
Преобразуемая величина характеризует назначение ПИП для преобразования той или иной физической величины.
Для каждого ПИП устанавливается естественная входная величина, которая наилучшим образом воспринимается им на фоне помех.
Например, естественной входной величиной терморезистивного ПИП является температура.
Диапазон выходных значений – алгебраическая разность между выходными сигналами, получаемыми при максимальной и минимальной входных величинах.
Погрешность ПИП– это отклонение его реальной функции преобразования (передаточной функции) от номинальной (идеальной передаточной функции).
Пусть имеется ПИП с номинальной функцией преобразования
Yн= fн(X) и реальной функциями преобразования Yр= fр(X), приведенными на рисунке 20. 1Рис. . Если на выходе датчика наблюдается величина Y1, то, зная передаточную функцию Yн= fн(X), можно считать, что на вход воздействует величина Хн, определяемая из уравнения Y1= fн(X), а фактически на входе будет величина Х1. Величина? Х = Хн – Х1 называется абсолютной погрешностью ПИП. Иногда ее называют погрешностью на входе преобразователя. Зная реальную функцию преобразования Yр= fр(X), можно перейти от погрешности преобразователя на входе? Х к погрешности преобразователя на выходе? Y:
|
|
|

|
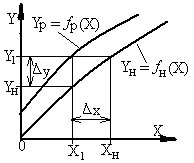
Рис. 20. 1. Функции преобразования.
Кроме рассмотренных характеристик, для описания ПИП широко используются такие характеристики, как точность, гистерезис, нелинейность, воспроизводимость, разрешающая способность и др.
Точность есть качество ПИП, отражающее близость к нулю его погрешности. Чем меньшую погрешность имеет датчик, тем он считается более точным. Численно точность А определяется отношением значения измеряемой или преобразуемой величины х к достигнутому при этом интервалу неопределенности d = 2?.

|
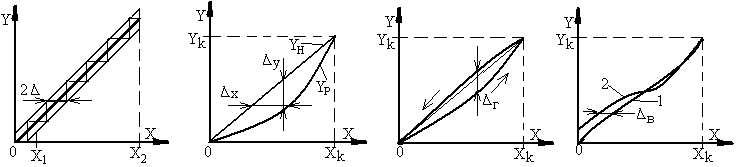
Разрешающая способность характеризует минимальное изменение измеряемой или преобразуемой величины, которое может почувствовать ПИП. Определяется как число градаций измеряемой или преобразуемой величины, различимое на выходе средства измерения (СИ). За различимые градации можно принять неперекрывающиеся интервалы, вписывающиеся в полосу неопределенности 2? преобразователя по всей ее длине (например, как показано на рис. 20. 2 а).
Разрешающая способность R СИ на интервале от Х1 до Х2 может быть определена по формуле

|
Нелинейность – это максимальное отклонение реальной характеристики преобразования от аппроксимирующей прямой линии (рис. 20. 2 б).
Гистерезис – это разность значений выходного сигнала ПИП для одного и того же входного сигнала, полученных при его возрастании и убывании (рис. 20. 2 в).
Воспроизводимость – это способность ПИП при соблюдении одинаковых условий выдавать идентичные результаты. Воспроизводимость результатов определяется по максимальной разности выходных значений ПИП, полученных в двух циклах градуировки (рис. 20. 2 г) и обычно выражается в процентах от максимального значения входного сигнала:
|
|
|
|
| |||||
|
| |||||
| а) | б) | в) | г) | ||
| Рис. 20. 2 | |||||

Насыщение – это состояние датчика, когда при определенном уровне входного воздействия датчик перестает отвечать приведенной градуировочной характеристике.
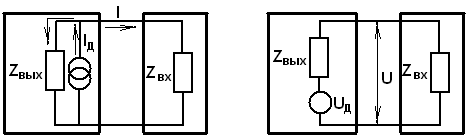
Выходное сопротивление ПИП (выходной импеданс) характеризует реакцию его выходного сигнала на подключение к его выходу фиксированной нагрузки. Преобразователь (датчик) с выходной стороны бывает нагружен входным сопротивлением (импедансом) последующего измерительного преобразователя. Выходные и входные импедансы, как правило, имеют активные и реактивные составляющие и представляются в комплексном виде. Для наиболее эффективного использования преобразователей необходимо согласование выходного сопротивления (импеданса) данного датчика с входным сопротивлением (импедансом) последующего преобразователя. Для минимизации искажений выходного сигнала датчика с токовым выходом (рис. 20. 3 а) последующий за ним преобразователь должен иметь минимальный входной импеданс. Если датчик имеет потенциальный выход (рис. 20. 3 б), он должен обладать минимальным выходным импедансом, а последующий преобразователь – большим входным импедансом.
|
| |
| а) | б) |
| Рис. 20. 3 | |
Динамические характеристики ПИП:
Так как в любом средстве измерений сигналы (в том числе и входной сигнал) не могут распространяться с бесконечно большой скоростью, ПИП обладают не только статическими, но динамическими характеристиками, которые описывают его инерционные свойства и определяют зависимость выходного сигнала от меняющихся во времени величин: входного сигнала, нагрузки, влияющих величин. Взаимосвязь между входным воздействием и выходным сигналом ПИП (датчика) можно описывать в виде линейных дифференциальных уравнений с постоянными коэффициентами, которые в зависимости от конструкции датчиков могут иметь разный порядок:

|
где an … a0 и bn …b0 – постоянные коэффициенты; Y и Х – мгновенные значения информативного параметра изменения выходной и измеряемой величин. Для описания динамических свойств большинства датчиков достаточно использовать дифференциальные уравнения второго порядка.
Если в датчике нет энергонакопительных элементов (конденсаторов, катушек индуктивностей, массы и т. п. ), то такой датчик называется датчиком нулевого порядка с передаточной функцией
|
|
|

|
где А0 – постоянное смещение; S – статическая чувствительность.
Данные датчики относятся к средствам измерения мгновенного действия, и для них можно не определять динамические характеристики. На практике в реальных датчиках на очень высоких частотах чувствительность S уменьшается, что может быть обусловлено наличием упругости, массы, паразитных емкостей и т. д. Поэтому такие датчики называют датчиками квази-нулевого порядка. Примером подобного датчика может являться реостатный датчик перемещения.
Датчики, содержащие один энергонакопительный элемент, описываются дифференциальным уравнением первого порядка

|
Примером датчика первого порядка является терморезистивный датчик, в котором в качестве энергонакопительного элемента используется теплоемкость. Датчики, содержащие два энергонакопительных элемента, описываются дифференциальным уравнением второго порядка:

|
Примером датчика второго порядка является акселерометр, в котором энергонакопительные элементы – это масса и пружина.
Для измерительных преобразователей динамические характеристики обычно выражают в виде переходных или амплитудно- и фазочастотных характеристик.
При ступенчатом изменении входной величины x = x0 = const средства измерения описываются переходной характеристикой

|
При подаче на вход датчика первого порядка ступенчатого воздействия его переходная характеристика хорошо аппроксимируется экспонентой вида

|
где Y0 – установившееся значение выходного сигнала; ? – постоянная времени; t – время.
Постоянная времени? – это время, в течение которого выходной сигнал датчика достигает уровня, составляющего приблизительно 63 % от установившегося значения при подаче на вход датчика ступенчатого внешнего воздействия. Постоянная времени является мерой инерционности датчика, которая определяется как? = C. R (если датчик рассматривается как тепловая система, то под С и R следует понимать теплоемкость и тепловое сопротивление).
При подаче на вход датчика второго порядка ступенчатого воздействия на его выходе практически всегда появляются колебания. Любой датчик второго порядка характеризуется собственной (резонансной) частотой, на которой происходит значительное увеличение выходного сигнала. Обычно рабочий диапазон датчиков выбирается либо значительно ниже собственной частоты (на 60 % и более), либо выше ее, кроме тех датчиков, для которых резонансная частота является рабочей. Для датчиков второго порядка необходимо указывать значение собственной частоты и коэффициент затухания, который может быть определен как отношение большей амплитуды к меньшей амплитуде пары последовательно взятых полуволн колебаний относительно установившегося значения.
Датчики (как и другие средства измерения) при любом изменении входной величины можно характеризовать операторной чувствительностью, определяемой как отношение операторного изображения информативного параметра изменения выходной величины Y(p) к операторному изображению измеряемой величины X(p):

|
где  – оператор Лапласа.
– оператор Лапласа.
В случае гармонического изменения входной величины используется комплексная чувствительность

|
где A и B – вещественная и мнимая части комплексной чувствительности.
Для описания динамических характеристик данных датчиков широко используются амплитудно-частотные и фазочастотные характеристики.
Модуль комплексной чувствительности называется амплитудно-частотной характеристикой

|
а аргумент – фазочастотной характеристикой

|
Частота входного сигнала, на которой выходной сигнал преобразователя уменьшается на 3 дБ, считается предельной рабочей частотой ПИП и называется частотой среза. Она характеризует наибольшую или наименьшую частоту входной величины, которую датчик может воспринять без искажений.
Динамическая погрешность – погрешность средства измерений, возникающая при измерении изменяющейся (в процессе измерений) физической величины.
Если ПИП имеет функцию преобразования Y = f(X), то в статическом режиме при значении величины на входе равном хt, величина на выходе будет Yt= f(хt), а в динамическом режиме величине хt соответствует величина на выходе yt, причем Yt ? yt. Разность между yt и Yt называют динамической погрешностью преобразователя, т. е? = yt– Yt .
Динамическая погрешность обусловлена реакцией средства измерения на скорость (частоту) изменения входного сигнала. Эта погрешность зависит от динамических свойств (инерционности) средства измерения, частотного спектра входного сигнала, изменений нагрузки и влияющих величин. На выходной сигнал средства измерений влияют значения входного сигнала и любые его изменения во времени.
Список литературы:
1. https: //studopedia. ru/6_83296_obshchie-svedeniya-po-metrologii. html
2. https: //www. pover. ru/stati/poverka-ampermetra. htm
3. http: //ргр-тоэ. рф/electrical-measurements/64-etalony-i-mery-elektricheskih-velichin. html
4. https: //ru. wikipedia. org/wiki/Системы_измерительных_приборов
5. https: //bstudy. net/600286/tehnika/elektromehanicheskie_izmeritelnye_pribory
6. https: //zaochnik. ru/blog/elektricheskie-cepi-dlya-chajnikov-opredeleniya-elementy-oboznacheniya/
7. https: //studwork. org/spravochnik/fizika/most-postoyannogo-toka
8. https: //studopedia. ru/2_3445_registriruyushchie-pribori. html
9. https: //studopedia. ru/19_325261_elektronnie-izmeritelnie-pribori. html
10. https: //studopedia. ru/3_50876_analogovie-elektronnie-voltmetri. html
11. https: //studopedia. ru/3_39686_obshchie-svedeniya. html
12. https: //moiinstrumentu. ru/kak-polzovatsya-multimetrom. html
13. https: //helpiks. org/3-68799. html
14. https: //helpiks. org/7-80518. html
15. https: //studref. com/593568/tehnika/pribory_izmereniya_napryazheniya_sily_toka
16. https: //www. ruscable. ru/info/pue/1-6. html
17. https: //znaesh-kak. com/e/e/измерение-сопротивлений
18. https: //studopedia. ru/12_91248_izmerenie-fazovogo-sdviga. html
19. https: //elenergi. ru/sredstva-i-metody-izmereniya-magnitnyx-velichin. html
20. https: //nashaucheba. ru/v47223/чередов_а. и., _щелканов_а. в. _первичные_измерительные_преобразователи? page=2
|
|
|
