 |
Револьверные питатели
|
|
|
|
Револьверные питатели наиболее эффективно используют при выполнении на одной операции двух и более переходов для подачи плоских предметов обработки толщиной свыше 0, 5 мм и объемных диаметром до 60 мм. Исходными технологическими данными, определяющими конструкцию питателя, являются: характеристика предметов обработки – конфигурация, размеры, точность изготовления, серийность выпуска, вид технологической операции и переходов; характеристика технологической машины – число ходов или оборотов в минуту, закрытая высота (между ползуном или шпинделем и столом), величина хода ползуна или шпинделя; действительная производительность (необходимая), равная числу предметов обработки, которые обрабатываются в единицу времени при реальных условиях эксплуатации.
В общем виде револьверные питатели состоят из привода, механизмов периодического движения, торможения и фиксации диска, блокировки и конструктивных элементов для загрузки питателя, фиксации ПО и удаления готовых ПО. В зависимости от вида технологической операции и переходов, точности изготовления ПО, конструкции привода и механизма периодического движения можно обойтись без механизмов передаточного, фиксации, торможения и блокировки. Их функции зачастую совмещают оставшиеся механизмы и конструктивные элементы.
Основным требованием, предъявляемым к приводу, механизмам передаточному, периодического движения и торможения диска, является выполнение заданных законов движения, обеспечивающих плавность поворота диска, отсутствие скачков угловой скорости и пиков кривой угловых ускорений, приводящих к ударам и значительному увеличению усилий, действующих на механизмы, а следовательно, быстрому износу и потере точности в работе.
|
|
|
Механизм периодического движения диска поворачивает рабочий диск на определенный угол в зависимости от числа гнезд в нем с последующим выстоем на период, необходимый для выполнения технологической операции, входа и выхода инструмента, загрузки и разгрузки питателя. Конструкция этого механизма определяет точность работы всего питателя и наличие механизмов фиксации, торможения и блокировки. Ведущее звено имеет одно из следующих видов движения: непрерывно или прерывисто вращательное и колебательное по дуге окружности. Число ведущих звеньев может быть одно, два и более.
Периодическое движение рабочего диска осуществляет один из следующих механизмов: мальтийский, кулачковый получервячный, фрикционный, шарнирно-зубчатый, с обгонной муфтой и храповой.
Шиберные питатели
Шиберные питатели применяют для перемещения ПО от места загрузки к рабочей зоне обработки в направлении, совпадающем с направлением движения шибера. При несовпадении этих направлений их применяют вместе с другими питателями.
Шиберные питатели используют для плоских ПО толщиной свыше 0, 3 мм, размером в направлении перемещения до 150 мм, а также полых цилиндрических или прямоугольных ПО высотой до 100 мм. В последнем случае на пути перемещения шибера необходимо устанавливать направляющие планки толщиной не менее половины высоты перемещаемых ПО, такого же размера должен быть и шибер.
В этих питателях, как правило, ведомое звено передаточного механизма является ведущим для шибера. Захватными элементами шибера могут быть открытые или закрытые трафареты, конструктивное исполнение которых зависит от толщины ПО и их конфигурации, точности и скорости подачи, вида технологической операции и способа удаления из рабочей зоны. Закрытые трафареты применяют редко, так как в этом случае требуется дополнительное время для выстоя на период входа и выхода рабочего инструмента. При открытых трафаретах имеется опасность отрыва предметов обработки от шибера в начале движения и при остановке в конце рабочего хода, что снижает точность подачи и ухудшает условия ориентации. Для исключения этого явления необходимо устанавливать рациональный закон движения, т. е. чтобы в начале движения шибер имел наименьшую скорость и плавное интенсивное нарастание скорости после соприкосновения с предметов обработки, т. е. имел бы наибольшую величину положительного ускорения. Это позволит сократить разницу между скоростями шибера и предметом обработки в момент, когда шибер догонит отскочивший от него предмет обработки. Следовательно, шибер должен двигаться в период выбега с ускорением, не превышающим по абсолютной величине ускорение, с которым перемещается по инерции предмет обработки, а длина пути выбега Sв шибера не должна быть меньше длины пути торможения предмета обработки Sт, т. е. условия движения предмета обработки в период торможения будут следующими:
|
|
|
aв max ≤ –μ g;
 ,
,
где aв max – максимальное ускорение движения шибера в период выбега; μ – коэффициент трения.
Как следует из этих формул, наибольшее влияние на длину пути торможения предмета обработки оказывает максимальная скорость перемещения шибера Vш max. Следовательно, , которые бы обеспечили минимальное значение этого параметра. Кроме того, увеличение производительности питателя наряду с построением рациональной циклограммы его работы и уменьшением периода холостого перемещения захватного органа может быть достигнуто и путем увеличения периода рабочего перемещения. Последнее может быть достигнуто уменьшением периода разбега, так как уменьшение периода выбега нежелательно ввиду существенного его влияния на точность положения предмета обработки перед рабочей позицией. Таким образом, критериями для выбора рационального закона движения шибера являются: минимальное значение величины максимальной скорости шибера; наибольшая величина его положительного ускорения; наименьшая величина его отрицательного ускорения; плавное изменение скоростей и ускорений; нулевое значение скоростей и ускорений на границах интервала рабочего перемещения.
|
|
|
Грейферные питатели
Грейферные питатели применяют в массовом и крупносерийном, в основном в штамповочном производстве, в приборостроении на операциях сборки полупроводниковых элементов, для подачи в ориентированном положении плоских и полых предметов обработки при многопереходной обработке в последовательном штампе или многопозиционном прессе-автомате и многооперационной обработке на нескольких в один ряд расположенных технологических машинах. В последнем случае могут быть использованы машины для различных видов обработки: штамповки, обработки резанием, сварки, сборки и др. Рабочий орган питателя – грейферные линейки – может осуществлять движение трех видов: однокоординатное – возвратно-поступательное в одной плоскости; двухкоординатное – в одной или двух взаимно перпендикулярных плоскостях; трехкоординатное – в трех плоскостях.
При однокоординатном движении грейферные линейки совершают поперечное относительно оси грейфера движение для захвата предмета обработки и отходов, а продольное – для перемещения предметов обработки с позиции на позицию и возвращение грейфера в исходное положение.
При двухкоординатном движении вертикальный подъем линеек осуществляется для съема предметов обработки с рабочий и холостых позиций и укладки их на следующие позиции, а продольное движение – для перемещения предметов обработки и возвращения линеек в исходное положение.
При трехкоординатном движении поперечный ход предназначен для захвата предметов обработки и отходов, вертикальный – для съема предметов обработки с фиксаторов штампов и с холостых позиций и укладки на следующие позиции, продольный – для перемещения с позиции на позицию и возвращения линеек в исходное положение.
Однокоординатные грейферы используют в основном для перемещения толстолистовых предметов обработки на операциях пробивки, гибки, неглубокой вытяжки, формовки, в ряде случаев их изготовляют переналаживаемыми. Привод, как правило, индивидуальный или от ползуна пресса. Двухкоординатные горизонтальные грейферы наиболее распространены в многопозиционных прессах-автоматах, а вертикальные – в линиях обработки крупных предметов обработки.
|
|
|
Трехкоординатные грейферы наиболее универсальные, но массы их движущихся элементов значительно больше, их привод сложнее, вследствие чего скорости перемещения ниже, чем у других грейферов.
В зависимости от траектории движения, габаритных размеров и массы предметов обработки, питатели могут получать движение от одного привода или от нескольких.
Число рабочих позиций определяется принятым технологическим процессом. Число холостых позиций n при многооперационной обработке на нескольких технологических машинах определяется числом последних и их расположением. Между двумя машинами это число зависит от расстояния между их центрами (осями) L и величиной продольного хода lх грейфера, т. е.
n = L / lx.
Продольный ход грейфера устанавливают в зависимости от наибольшего размера предметов обработки в направлении перемещения:
lх = (1, 1…1, 35)lз,
где lз – размер предмета обработки в направлении перемещения, мм.
Большие значения относятся к мелким предметам обработки. Для вытяжных работ на прессах это выражение имеет вид при mоб = 0, 33…0, 45:
lх = (0, 8…1, 0)Нп,
где mоб – общий коэффициент вытяжки; Нп – ход ползуна пресса, мм.
Поперечный ход lп линеен в горизонтальной плоскости и зависит от размеров предмета обработки в направлении поперечного хода и верхней части инструмента, которая в нижнем крайнем положении может соприкасаться с захватными элементами грейфера. Обычно lп = 25…300 мм.
Расстояние между разомкнутыми захватными элементами и опустившейся верхней частью штампа должно позволять свободное перемещение захватных элементов (гарантийный зазор равен или больше 5 мм на сторону). В случае необходимости иметь переналаживаемый питатель следует предусмотреть регулировку расстояния между захватными элементами или их замену. Величина вертикального хода определяется высотой обрабатываемых предметов обработки и расположением их в инструменте, видом технологического процесса и складывается из толщины линеек, высоты ПО на переходах и гарантированных зазоров. Гарантированные зазоры принимают равными 5…25 мм.
Грейферные линейки изготовляют из стали и алюминиевых сплавов. Последние для повышения износостойкости армируют стальными закаленными вставками.
Питатель может загружаться из магазина и из вырубного штампа на загрузочной позиции. Перемещение с позиции на позицию может осуществляться без захвата – клавишами (рис. 2. 1, а) или полуоткрытыми трафаретами по контуру ПО (рис. 2. 1, б) и с захватом ПО – клещами (рис. 2. 1, в) или зажимными колодками (рис. 2. 1, г). При горизонтальном расположении осей инструмента для перемещения ПО используют каретку (рис. 2. 1, д) или зажимные колодки (рис. 2. 1, е).
|
|
|
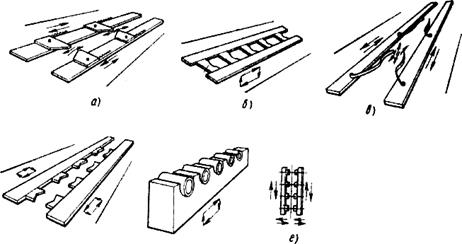
Рисунок 2. 1 – Виды захватов в грейферных питателях
Удаление предметов обработки с разгрузочной позиции осуществляется напровал, захватными элементами, последующим предметом обработки, струей сжатого воздуха. Отходы удаляют в зависимости от их размеров и места образования напровал, разрубкой специальными ножами и сталкиванием их по склизам, струей сжатого воздуха или специальными устройствами по выемкам в штампах и по склизам.
Фиксацию на рабочих и холостых позициях осуществляют с помощью захватных элементов линеек, специальными фиксаторами и рабочим инструментом.
Блокировка предусматривается для контроля наличия ПО и правильности их Ориентации на рабочих позициях, наличия и состояния инструмента (например, пуансонов малого размера), соблюдения циклограммы в части своевременного движения и остановок.
Скорости рабочего перемещения грейферных линеек и точность укладки ПО на позициях, а также время холостых ходов определяют величину цикла работы питателя, а следовательно, и его производительность. Захваты и линейки могут перемещаться в продольном и поперечном направлениях последовательно и иметь траектории движения в виде прямоугольника, с некоторым сдвигом по фазе в виде четырехугольника с округленными сторонами и в виде сегмента.
На рисунке 2. 2 представлен двухкоординатный горизонтальный грейферный питатель, устанавливаемый на открытом однокривошипном прессе. Привод осуществляется от вала пресса через две пары конических зубчатых колес 12 и 13, цепную передачу 14, вал 15, зубчатое колесо 20 с эксцентриком, которая обкатывает неподвижное (солнечное) зубчатое колесо 10. Эксцентрик зубчатого колеса 20 шарнирно соединен с кареткой 6, скользящей по направляющим штангам.
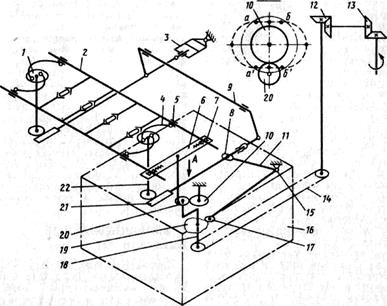
Рисунок 2. 2 – Схема грейферного питателя
Линейки 2 укреплены на каретке 6 подпружиненными вставками 7. В случае заклинивания линеек вставки 7 расходятся, освобождая их и одновременно воздействуя на конечные выключатели, выдающие сигнал на остановку пресса. Эксцентриковый палец зубчатого колеса 20, обкатывая зубчатое колесо 10, совершает движение по эллиптической орбите. Линейки 2 получают продольное перемещение при движении эксцентрикового пальца по участкам орбиты аа' и бб'. Расхождение и сближение линеек осуществляется в момент прохождения пальцем участков орбиты аб и а'б'. Сближение линеек происходит следующим образом: на приводном валу 18 закреплен кулачок 19. С контуром кулачка контактирует ролик 17 рычага 11, сидящего на оси 15 корпуса 16. На другом конце рычага имеется удлиненное отверстие, через которое проходит палец 5, укрепленный на тяге зубчатой рейки 21. Рейка с помощью пневмоцилиндра 3 постоянно прижимает ролик к кулачку 19. При вращении последнего поворачивается рычаг 11. Качание рычага сообщает возвратно-поступательное движение рейке, которая в свою очередь поворачивает вал 22 на 180°. Тяги 4, связанные с диском 1 и ползушками 5, в которых могут скользить линейки, сводят и разводят их. Ползунки движутся по направляющим. Движение рейке 21 передается от вала 9, проходящего через станину пресса, на вторую каретку поперечного хода линеек; обе рейки работают синхронно. Устройство с дисками и тягами обеспечивает минимальную скорость в начале и конце движения линеек.
Комбинированные питатели
Комбинированные питатели состоят из последовательно действующих питателей, обеспечивающих наиболее рациональную и эффективную подачу ПО от места загрузки к рабочей зоне в массовом и крупносерийном производстве, когда одним питателем это достигнуть невозможно.
Выбор схемы подачи, видов и конструкций питателей определяется конфигурацией и размерами ПО, технологией его изготовления, расстоянием между местом загрузки и рабочей позицией, а также взаимным их расположением.
Питатель, представленный на рис. 2. 3, состоит из шиберного и грейферного питателей. ПО из штампа, расположенного над питателем, проталкивается пуансоном через матрицу 4 и попадает в полувтулку 5 (трафарет) шибера. Каретка 1 с клавишами 8 (грейфер) получает движение для перемещения ПО с позиции на позицию от вала пресса (на рисунке не показано) через коническую пару зубчатых колес 8, кулачок 7 и ролик 6. Шибер встроен в каретку 1. В исходное положение грейфер возвращается пружинами 2, в то время как рабочий инструмент (пуансоны) фиксируют ПО, чтобы последние не могли быть перемещены обратно вместе с охватывающими их подпружиненными клавишами.
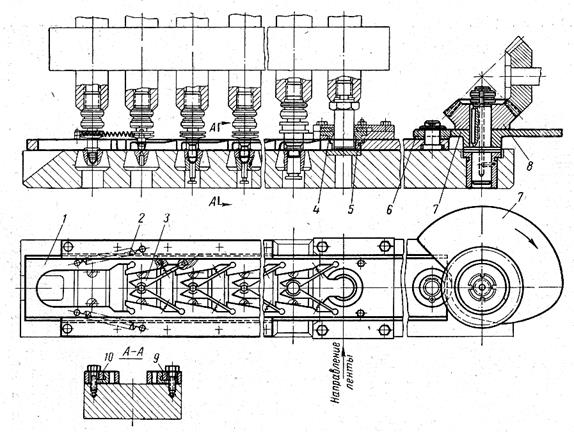
Рисунок 2. 3 – Комбинированный питатель
Промышленные роботы
Промышленные роботы (ПР) представляют собой новый класс универсальных автоматических средств комплексной автоматизации производственных процессов. Благодаря возможности быстрой переналадки ПР обеспечивают наибольший эффект в условиях частой смены объектов производства. Поэтому с ПР связано развитие качественно нового направления в автоматизации мелкосерийного многономенклатурного производства, основанного на объединении роботов и автоматизированного технологического оборудования в гибкие производственные системы различной сложности. Применение ПР в массовом производстве позволяет в более сжатые роки комплектовать автоматические линии различного назначения [ ].
Комплексное применение ПР обеспечивает повышение производительности труда в 1, 5…2 раза (на некоторых операциях в 3…5 раз), коэффициента сменности оборудования в 2 раза при одновременном улучшении ритмичности и общей культуры производства. Использование ПР открыло перспективы создания принципиально новых технологических процессов не связанных с ограничениями, которые накладывает участие человека. Большая часть эксплуатируемых сейчас ПР принадлежит к поколению программно-управляемых роботов. Это, в первую очередь, ПР с цикловой и позиционной системой программного управления. Главное преимущество таких роботов заключается в том, что они перекрывают значительный спектр технологических операций при достаточно простом конструктивном исполнении, высокой надежности, доступности обслуживания и ремонта. Наиболее эффективно их использование на монотонно-циклических операциях при сравнительно редких переналадках на новый вид работ. Поэтому, несмотря на развитие ПР последующих поколений (с адаптивным и интеллектуальным управлением), потребность в простых программных роботах не снижается, а, наоборот, продолжается их усовершенствование и развитие.
Описание лабораторной установки.
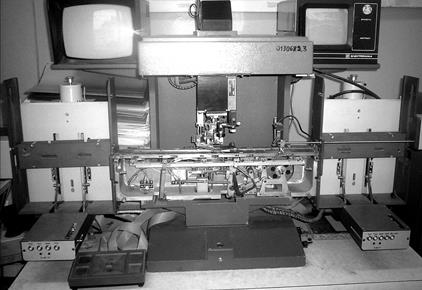
В качестве лабораторной установки используется автомат присоединения проволочных выводов при производстве микросхем ЭМ-4090. Установка состоит из устройства кассетной загрузки заготовок 1 (Рисунок. 2. 4), грейферного механизма 2 для подачи заготовок в зону сварки выводов и кассетной системы 3 приема заготовок. Заготовки микросхем устанавливаются на подложку специальной ленты с перфорацией для грейферного захвата. При вращении вала шагового электродвигателя 4 левая подающая кассета 5 с перфорированными лентами опускается до входного паза грейферного механизма, в этот момент включается шаговый двигатель шиберного питателя и перфорированная лента выталкивается из кассеты на позицию захвата грейферного питателя. С помощью грейферного питателя лента с заготовками микросхем подается на позицию сварки 6. По окончании операции сварки всех заготовок на ленте, включается правый электродвигатель 7 шиберного механизма и лента подается в приемную ячейку приемной кассеты 8. Одновременно с правой кассеты подается новая перфорированная лента с заготовками и процесс пошаговой подачи заготовок в зону сварки автоматически повторяется.
 |
|
|
|
