 |
Учебное занятие № 211-212. Система автоматического управления торможением САУТ-ЦМ/485. КИО-САУТ. Учебный вопрос №1. Назначение, устройство и принцип действия системы автоматического торможения САУТ
|
|
|
|
Учебное занятие № 211-212
(2 часа)
Система автоматического управления торможением САУТ-ЦМ/485. КИО-САУТ
Учебные вопросы:
1. Назначение, устройство и принцип действия системы автоматического торможения САУТ.
2. Виды локомотивных устройств системы САУТ и их краткая характеристика. База данных путевых параметров.
3. Порядок приёмки, включения и отключения, порядок действий локомотивной бригады при нарушении нормальной работы устройств САУТ.
4. Назначение и функциональные возможности комплекса информационного обеспечения КИО-САУТ
Учебный вопрос №1
Назначение, устройство и принцип действия системы автоматического торможения САУТ
Система автоматического управления торможением (САУТ-ЦМ) (Рисунок 4. 34) предназначена для повышения безопасности движения, увеличения пропускной способности железнодорожных участков, улучшения условий труда локомотивных бригад.
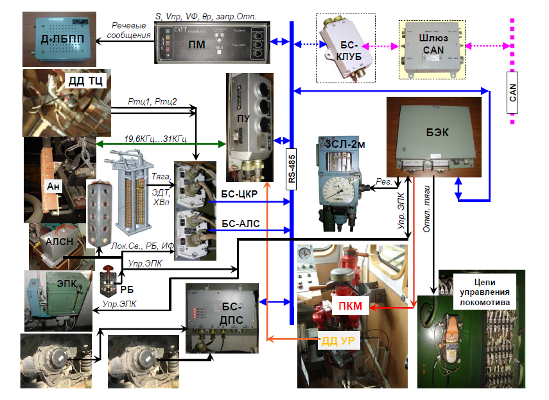
Рисунок 4. 34Схема подключения блоков САУТ-ЦМ
САУТ-ЦМ в своей работе использует показания локомотивных светофоров автоматической локомотивной сигнализации непрерывного типа (АЛСН) или показания комплексного локомотивного устройства безопасности КЛУБ-У, принятые от путевых устройств АЛСН, а также информацию, принятую от путевых устройств САУТ.
Основные функции, выполняемые системой:
- исключение проездов запрещающих сигналов;
- контроль максимально-допустимых скоростей на участке движения;
- осуществляет прием сигналов путевых устройств и датчиков ДПС-У;
- производит вычисления по алгоритмам прицельного торможения;
- при превышении траекторий безопасности движения воздействует на тормозные устройства поезда;
|
|
|
- останавливает поезд перед светофором с запрещающим показанием;
- контролирует бдительность машиниста посредством синтезатора речи.
Система автоматического управления торможением состоит из путевых и локомотивных устройств. Путевые устройства САУТ передают на локомотив информацию о текущем и следующем блок-участках, а локомотивная аппаратура САУТ вычисляет программную (максимально допустимую) скорость и следит, за тем, чтобы не было ее превышения.
Путевые устройства выходных и проходных светофоров в настоящее время демонтированы и их функции переданы локомотивному блоку путевых параметров, а также не все предвходные светофоры оборудованы путевыми устройствами САУТ и их функции в этом случае выполняет также локомотивный блок путевых параметров.
Принцип действия системы автоматического торможения САУТ.
При движении поезда по активному участку рельсовой нити Lа (рисунок 4. 35) в антенне индуктируется частотный сигнал и поступает в приемник сигналов и далее на один из входов элемента совпадения И1. Кроме этого, от осевого датчика пути и скорости, записывается число электрических импульсов, пропорциональное длине блок-участка в счетчике импульсов.
Эта длина высвечивается на индикаторе пути. По числу считанных импульсов определяется в условном масштабе длина участка. Значение измеренной длины помощью АП преобразуется в значение программной скорости зависимости от расстояния до сигнала и показаний АЛСН вырабатываются напряжения, пропорциональные допустимым скоростям движения для служебного и экстренного торможения.
А измеритель скорости ИС, получая информацию от датчика скорости, вырабатывает напряжение, пропорциональное фактической скорости поезда.

Рисунок 4. 35 Схема принятия сигналов с генераторов САУТ
К блоку сравнения БС подходят два сигнала для сравнения: напряжение программной скорости и фактической для выдачи команды на блок ВТ на служебное или экстренное торможение. Если скоростьvфак> vдоп, то из блока БС подается сигнал в блок ВТ и включается торможение поезда, которое длится до тех пор, пока скорость vфак не снизится до скорости vдоп. После прохождения антенны над шлейфом прием высокочастотного сигнала прекращается, и исчезает сигнал на выходе приемника, запирая элемент И1. Прекращается отсчет и суммирование импульсов счетчиком. Когда элемент И1 находился в рабочем состоянии (был открыт), инвертор Инви элемент И2 были заперты и сигналы от датчика ОД на блок Д не проходили. С момента прекращения работы элемента И1 инвертор открывает элемент И2, и сигналы через блок делителя частоты Д поступают на вход счетчика Сч. С помощью делителя число импульсов от датчика ОД приводится к масштабу полной длины блок-участка. Счетчик переходит в режим вычитания и производит вычитание из полной длинны расстояния, проходимого поездом. По мере приближения поезда к светофору и непрерывном уменьшении длины блок-участка пропорционально уменьшается напряжение на выходе АП, определяющее программную скорость, а следовательно, изменяется плавно тормозная сила до полной остановки. Если поезд выходит на блок-участок со скоростью, превышающей программную, торможение включается немедленно и скорость снижается до программной. После снижения скорости до программной происходит отпуск тормозов. При движении поезда на запрещающий сигнал АП и Сч рассчитывают две траектории равнозамедленного движения с местом " прицельной" остановки за 40 м перед сигналом. В случае превышения программного значения скорости vпрогнад фактической срабатывает ВТ и отключает тягу, а затем подается команда на торможение, при котором замедление поезда достигает расчетного значения. Режим работы САУТ выбирается таким, чтобы поезд, идущий с максимальной скоростью, автоматически остановился перед запрещающим сигналом одной ступенью торможения с последующим отпуском.
|
|
|
При приеме поезда на станцию по боковому не кодированному пути напольные генераторы предвходных и входных сигналов работают на своей частоте. После проследования предвходного сигнала блок приема информации запоминает эту частоту и совместно с АЛСН управляет блоком программной скорости таким образом, что в начале блок-участка вырабатывается напряжение, пропорциональное допускаемым скоростям, а на расстоянии необходимого тормозного пути в конце блок-участка программные траектории плавно снижаются до значений 50км/ч. При движении поезда по боковым не кодированным путям блок программной скорости вырабатывает напряжение, пропорциональное допускаемой скорости, а на расстоянии тормозного пути перед сигналом эта траектория плавно снижается до нуля. Автоматическое регулирование скорости при движении к входному или закрытому выходному сигналам станции осуществляется так же, как и при движении поезда по красному с желтым огнем на локомотивном светофоре. Во всех случаях превышение допускаемой скорости на 5 км/ч вызывает принудительное экстренное торможение.
|
|
|
|
|
|
