 |
Рис. 8.10. Зависимость расходных характеристик распределителей от формы проточек
|
|
|
|
Рис. 8. 10. Зависимость расходных характеристик распределителей от формы проточек
Так распределитель, на буртиках золотника которого выполнены проточки треугольной формы (рис. 8. 10, а), имеет расходную характеристику в виде параболы, а золотник с прямоугольными проточкам на буртиках обеспечивает почти линейную расходную характеристику распределителя (рис. 8. 10, б).
Как и в дискретных распределителях, прямое управление применяется для аппаратов с условным проходом до 10 мм. При больших значениях условных проходов применяют распределители с пилотным управлением (рис. 8. 11).
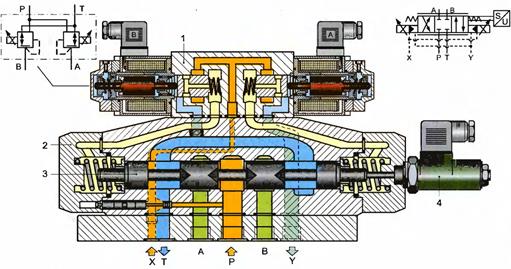
Рис. 8. 11. Гидрораспределитель с пропорциональным пилотным управлением
Как правило, в качестве пилота применяют сдвоенные трехлинейные редукционные клапаны с пропорциональным управлением 1. В исходном положении, при отсутствии управляющих сигналов на пропорциональных магнитах пилотного клапана, обе пружинные полости основного распределителя 2 (распределителя второго каскада) связаны со сливом, его золотник 3 находится в нейтральной позиции под действием центрирующих пружин. При подаче управляющего электрического сигнала, например на магнит В пилотного клапана 1, давление в левой пружинной полости основного распределителя 2 возрастет до величины, пропорциональной сигналу управления и золотник 3 основного распределителя, сжимая правую центрирующую пружину, сместится на соответствующую величину вправо. Рабочая жидкость из канала Р начнет поступать в канал В с расходом соответствующим величине смещения золотника. Аналогичным образом происходит коммутация каналов Р и А при подаче управляющего сигнала на пропорциональный магнит А пилотного клапана. Для обеспечения точности управления распределителем 2 обратная связь организуется по положению золотника 3, позиция которого фиксируется датчиком положения 4.
|
|
|
От распределителей с пропорциональным управлением требуется не только точно следовать изменениям входного электрического сигнала, но и достаточно быстро реагировать на эти изменения. Быстрота реакции распределителя, равно как и других гидроаппаратов с пропорциональным управлением, характеризуется двумя параметрами: временем срабатывания и частотой пропускания,
Время срабатывания — время, за которое выходной параметр гидроаппарата примет значение соответствующее входному управляющему сигналу. Время срабатывания гидроаппаратов с пропорциональным управлением лежит в диапазоне от 10 до 100 мс.
Частота пропускания показывает на какое количество изменений (от нуля до максимального значения) входного сигнала в секунду гидроаппарат способен отреагировать. В среднем частота пропускания гидроаппаратов с пропорциональным управлением лежит в интервале от 5 до 100 Гц.
Практическая часть
Ответить на контрольные вопросы:
1. Назначение пропорционального магнита в гидроприводе.
2. Принцип действия пропорционального магнита в гидроприводе.
Практическая работа №6.
Классификация исполнительных механизмов. Условные обозначения и принцип действия ИМ.
Цель работы – Ознакомиться с классификацией исполнительных механизмов.
Теоретическая часть
Классификация исполнительных механизмов (рис. 1. 1) производится в первую очередь по виду энергии, создающей усилие (момент) перемещения регулирующего органа. Соответственно, ИМ бывают пневматические, гидравлические и электрические.
В пневматических ИМ усилие перемещения создается за счет давления сжатого воздуха на мембрану, поршень или сильфон; давление обычно не превышает 103 кПа.
|
|
|
В гидравлических ИМ усилие перемещения создается за счет давления жидкости на мембрану, поршень или лопасть; давление жидкости в них обычно находится в пределах (2, 5-20)103 кПа. Отдельный подкласс гидравлических ИМ составляют ИМ с гидромуфтами.
Пневматические и гидравлические мембранные и поршневые ИМ подразделяются на пружинные и беспружинные. В пружинных ИМ усилие перемещения в одном направлении создается давлением в рабочей полости ИМ, а в обратном направлении – силой упругости сжатой пружины. В беспружинных ИМ усилие перемещения в обоих направлениях создается перепадом давления на рабочем органе механизма.
Электрические ИМ по принципу действия подразделяются на электродвигательные (электромашинные) и электромагнитные.
По характеру движения выходного элемента большинство ИМ подразделяются на: прямоходные с поступательным движением выходного элемента, поворотные с вращательным движением до 360° ( однооборотные ) и с вращательным движением на угол более 360° ( многооборотные ).
Существуют ИМ, в которых используются одновременно два вида энергии: электропневматические, электрогидравлические и пневмогидравлические. Вид энергии управляющего сигнала может отличаться от вида энергии, создающей усилие перемещения.
В электрических системах автоматизации и управления наиболее широко применяются электромашинные и электромагнитные исполнительные механизмы.
Основным элементом электромашинного ИМ является электрический двигатель постоянного или переменного тока. Такие исполнительные механизмы обычно называют электроприводами, т. к. согласно ГОСТ электропривод - это электромеханическая система, состоящая из электродвигательного, электрического преобразовательного, механического передаточного, управляющего и измерительного устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением.
Электромагнитные ИМ дискретного действия выполняются в основном на базе электромагнитов постоянного и переменного тока и постоянных магнитов. Жесткое и упругое соединение узлов систем осуществляют различного рода электромагнитные муфты.
|
|
|
Множество регулирующих органов также многообразно, как многообразны объекты управления. В качестве примера можно привести основные типы РО, применяемых в системах подачи и перемещения жидких, газообразных и сыпучих материалов. По виду воздействия на объект их можно подразделить на два основных типа: дросселирующие и дозирующие.
Дросселирующие РО изменяют сопротивление (гидравлическое, аэродинамическое) в системе путем изменения своего проходного сечения, воздействуя на расход вещества. Примерами таких РО являются заслонки, диафрагмы, задвижки, краны, клапаны.
Дозирующие РО выполняют заданное дозирование поступающего вещества или энергии за счет изменения производительности определенных агрегатов: дозаторов, насосов, компрессоров, питателей, электрических усилителей мощности.
|
|
|
