 |
Методические указания к решению задач 1 – 10.
|
|
|
|
Прежде чем приступить к решению задач, необходимо изучить модуль 2 «Электрооборудование подъемно-транспортных машин»: Тема 5. Основное электрооборудование мостовых кранов. Тема 6. Расчет и выбор основного электрооборудования мостовых кранов. Тема 7. Схемы управления асинхронным двигателем с фазным ротором посредством кулачковых контроллеров и механические характеристики электроприводов. Тема 8. Схемы управления асинхронным двигателем с фазным ротором посредством магнитных контроллеров и механические характеристики электроприводов. Тема 9. Схемы управления двигателем постоянного тока посредством кулачковых контроллеров и механические характеристики электроприводов. Тема 10. Схемы управления двигателем постоянного тока посредством магнитных контроллеров и механические характеристики электроприводов.
Необходимо знать методику расчета мощности электродвигателей механизмов мостовых кранов, методику расчета и выбора пускорегулирующих резисторов, принцип работы электроприводов механизмов мостовых кранов с применением магнитных и кулачковых контроллеров, типовые механические характеристики.
Для правильного выбора электрооборудования механизмов мостовых кранов необходимо уметь пользоваться справочной литературой и каталогами.
ПРИМЕР РЕШЕНИЯ ЗАДАЧИ
Рассчитайте предварительную мощность и выберите двигатель переменного тока для привода механизма передвижения тележки мостового крана. Приведите расчетные механические характеристики двигателя, управляемого магнитным контроллером типа К и определите сопротивления ступеней резисторов пускорегулирующего реостата. Произведите выбор сопротивлений реостата и начертите схему их соединений.
|
|
|
ИСХОДНЫЕ ДАННЫЕ
Масса перемещаемого груза mг = 50 т; Передаточное число редуктора iр = 41, 7;
Масса тележки mo = 31, 8 т; КПД механизма η м = 0, 83;
Скорость передвижения Vп = 0, 6 м/с; Путь перемещения L = 28, 1 м;
Диаметр ходового колеса Dk = 0, 5 м; Число циклов в час Nц = 15 ц/час.
Диаметр цапфы колеса dц = 0, 15 м;
1. Расчет предварительной мощности и выбор двигателя.
1. 1. Расчет статической мощности
 ,
,
где Fк – тяговое усилие на ободе ходового колеса
 β = 1, 4 - 2 - коэффициент, учитывающий дополнительное трение в ребордах колес;
β = 1, 4 - 2 - коэффициент, учитывающий дополнительное трение в ребордах колес;
μ = 0, 015 - 0, 02 - коэффициент трения скольжения при подшипниках качения;
f = 0, 0005 - 0, 0006 - коэффициент трения качения ходовых колес по рельсам.
1. 2. Предварительная мощность двигателя
Р′ пред = К ∙ Рс = 0, 9 ∙ 5, 28 = 4, 75 кВт,
где К = 0, 9 - коэффициент, учитывающий цикличность работы механизма.
1. 3. Ориентировочная продолжительность включения
ПВор = (КI ∙ tp / tц) ∙ 100% = ( 2 ∙ 46, 8 /240) ∙ 100% = 39 %, где
КI = 2 - количество операций в течение одного цикла;
tp = L / Vп = 28, 1/ 0, 6 = 46, 8 с - время одной операции;
tц = 3600 / Nц = 3600 / 15 = 240 с - время цикла.
1. 4. Предварительная мощность двигателя при каталожной продолжительности включения
ПВкат = 40 %: Рпред = Р′ пред ∙  = 4, 75
= 4, 75  .
.
1. 5. Предварительная угловая скорость вращения
|
|
|
ω пред =  =
=  = 100 рад/с.
= 100 рад/с.
1. 6. По значениям Рпред и ω пред по каталогу [5], стр. 55 -58, табл. 2-32 и табл. 2-34 выбираем двигатель переменного тока типа МТF112-6 соблюдая условие, что номинальная мощность должна быть равна или больше (до 20%) предварительной, т. е. Рн ≥ Рпред и данные заносим в таблицу.
| Тип двигат. | Рн, кВт | nн, об/мин | Iс, А | Uc, В | Iр н, А | Upн, В | Ммакс, Н∙ м | GD2дв, кгм2 | η дв | ПВ, % |
| МТF112-6 | 5, 5 | 14, 8 | 18, 3 | 0, 36 | 0, 74 |
1. 7. Номинальная угловая скорость двигателя
ω н = 2π nн / 60 = 0, 105nн = 0, 105∙ 915 = 96 рад/с
1. 8. Номинальный момент двигателя
Мн = 103 ∙ Рн / ω н = 103 ∙ 5, 5 / 96 = 57, 3 Нм;
2. Расчет пускорегулирующих резисторов.
2. 1. Базисный момент, необходимый для получения необходимого ускорения
Мб =  Н∙ м
Н∙ м
где t = 1 - 5 с – рекомендуемое время разгона;
Мс =  Н∙ м – статический момент на валу двигателя;
Н∙ м – статический момент на валу двигателя;
GD2общ = kвр ∙ GD2дв + 101 ∙  = 1, 1 ∙ 0, 36 + 101 ∙
= 1, 1 ∙ 0, 36 + 101 ∙  = 8, 22 кгм2 - суммарный маховый момент, приведенный к валу двигателя;
= 8, 22 кгм2 - суммарный маховый момент, приведенный к валу двигателя;
kвр = 1, 1 – 1, 3 – коэффициент махового момента вращающихся частей.
2. 2. Расчетный ток резистора
I 100% = 
 =
=  = 21, 4 А.
= 21, 4 А.
2. 3. Находим номинальное сопротивление роторной цепи двигателя
Rн =  =
=  = 5, 75 Ом.
= 5, 75 Ом.
2. 4. Для магнитного контроллера типа К находим разбивку ступеней сопротивлений R% и токов I% в процентах из [5], стр. 173, табл. 7 - 9 и данные вносим в итоговую таблицу.
2. 5. Определяем расчетные сопротивления ступеней по формуле Rст = Rн ∙ R% / 100, Ом
и данные заносим в итоговую таблицу
Rст1 (Р1- Р4) = 5, 75 ∙ 15 / 100 = 0, 86 Ом
Rст2 (Р4- Р7) = 5, 75 ∙ 20 / 100 = 1, 15 Ом.
Rст3 (Р7- Р10) = 5, 75 ∙ 40 / 100 = 2, 3 Ом.
Rст4 (Р10- Р13) = 5, 75 ∙ 120 / 100 = 6, 96 Ом.
2. 6. Находим расчетную мощность резистора в трех фазах
Рр3 =  =
=
=  = 8, 54 кВт.
= 8, 54 кВт.
Расчетные коэффициенты определяем по [5], табл. 8-3, 8-4 (стр. 188- 189) и рис 8. 11 (стр. 185) в зависимости от режима работы - средний (ПВ = 40%), типа электропривода – с параметрическим регулированием двигателей с фазным ротором при наличии торможения противовключением, числа включений в час Z и соотношения GD2общ /1, 2 GD2дв = 8, 22 / 1, 2 ∙ 0, 36 = 19.
|
|
|
При частоте включения в час Z = 120 вкл/час приведенная частота включения
Z′ = Z ∙ GD2общ /1, 2 GD2дв = 120 ∙ 19 = 2280 вкл/час.
Кт = 0, 65 – коэффициент нагрузки электропривода;
η экв. б = 0, 76 – базисный КПД электропривода;
η экв = 0, 55 - эквивалентный КПД электропривода;
ε о = 0, 4 – относительная продолжительность включения;
α = 1, 3 – коэффициент использования;
Ка = 1 – коэффициент использования в системе электропривода.
2. 7. Находим расчетную мощность резистора в одной фазе
Рр1 = Рр3 / 3 = 8, 54 / 3 = 2, 85 кВт
2. 8. Расчетный тепловой ток резистора
Iрт =  =
=  = 29, 3 А.
= 29, 3 А.
2. 9. Находим расчетные значения токов по ступеням и данные заносим в итоговую таблицу.
Iст1(Р1- Р4) =  =
=  = 24, 3 А;
= 24, 3 А;
Iст2 (Р4- Р7) = =  = 17, 3 А;
= 17, 3 А;
Iст3 (Р7- Р10) = =  = 14, 7А;
= 14, 7А;
Iст4 (Р10- Р13) = =  = 6, 2 А.
= 6, 2 А.
2. 10. В соответствии с таблицей нормализованных ящиков резисторов типа НФ 1А выбираем из [5], табл. 7-7 (стр. 172) для всех ступеней ящики типа 2ТД. 754. 054-12 в количестве 3 шт. Сопротивление ступеней необходимо подбирать таким образом, чтобы фактическая величина отличалась от расчетной не более чем на ± 20%. Отклонение фактического сопротивления от расчетного определяем по формуле
Δ R = (R факт – Rрасч)100% / Rрасч
Отклонение фактического тока от расчетного определяем по формуле
Δ I = (I факт – I расч)100% / I расч
Заносим расчетные величины Δ R и Δ I в итоговую таблицу.
2. 11. Приводим схему соединения резисторов

2. 12. Данные расчетов по сопротивлению и току заносим в итоговую таблицу.
|
|
|
|
Ступени |
R, % |
I, % | Расчетные параметры | Фактические параметры | Отклонение от расчетных параметров | |||
| Rступ., Ом | Iступ., А | Rступ., Ом | Iступ., А | Δ R, % | Δ I, % | |||
| Р1- Р4 | 0, 86 | 24, 3 | 0, 898 | + 4, 1 | + 48 | |||
| Р4- Р7 | 1, 15 | 17, 3 | 1, 2 | + 4, 3 | + 108 | |||
| Р7- Р10 | 2, 3 | 14, 7 | 2, 392 | + 4, 0 | + 146 | |||
| Р10- Р13 | 6, 96 | 6, 2 | 5, 992 | - 2, 6 | + 485 | |||
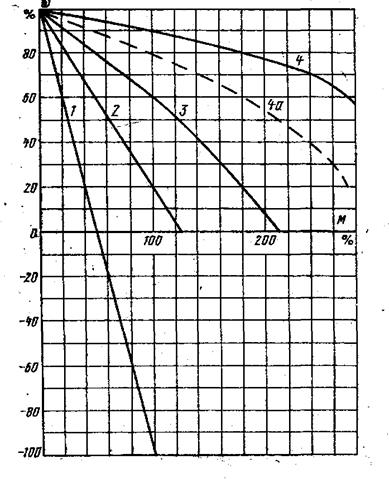
Механические характеристики двигателя 4МТF132L6, управляемого контроллером К.
|
|
|
