 |
Тема 9.2. Возможные пути технической реализации гибких линий
|
|
|
|
Тема 9. 2. Возможные пути технической реализации гибких линий
Устройства воздействия на напряжение по концам линии
Воздействие на напряжение по концам линии можно осуществить двумя путями:
- регулированием и стабилизацией напряжения в узлах и промежуточных точках линии:
- изменением фазного сдвига между напряжениями по концам линии.
К устройствам регулирования и стабилизации напряжения относятся: синхронные компенсаторы, управляемые шунтирующие реакторы и статические компенсаторы реактивной мощности.
Синхронный компенсатор — синхронная машина, способная работать как в режиме генерации реактивной мощности (основной режим), так и ее потребления и предназначенная для стабилизации напряжения в узле электрической сети, к которому она подключена. Синхронные компенсаторы достаточно широко используются в электроэнергетических системах, однако для решения перечисленных выше задач они не вполне пригодны в силу относительно большой по сравнению с новыми устройствами электромагнитной инерционности, а также сложности изготовления и обслуживания.
Управляемые шунтирующие реакторы — это реакторы, мощность которых может изменяться с помощью управляющих устройств, что обеспечивает баланс реактивной мощности в точке их включения.
Управление шунтирующим реактором может выполняться двумя способами: изменением проводимости реактора за счет подмагничивания магнитопровода реактора постоянным током (использованием нелинейности кривой намагничивания стали) и изменением длительности протекания тока через реактор в течение каждого полупериода частоты сети путем управления тиристорами, включенными последовательно с реактором.
|
|
|
Рассмотрим эти способы.
Управляемый с помощью подмагничивания реактор имеет замкнутый или с воздушными зазорами магнитопровод из трансформаторной стали, на котором расположены две обмотки рабочая и управляющая. Рабочая обмотка включается в сеть, в которой имеется избыток реактивной мощности и которую нужно компенсировать с помощью этого реактора. Вторая обмотка — управляющая. По ней протекает постоянный ток управления, изменяя значения которого можно изменять магнитное состояние магнитопровода и, следовательно, индуктивность рабочей обмотки и ее индуктивное сопротивление. Поэтому изменяется ток рабочей обмотки и реактивная мощность потребляется реактором.
Если обе обмотки расположены так, что оси их магнитных полей совпадают, то осуществляется продольное Рюдмагничивание магнитопровода, если оси их магнитных полей не совпадают и в пространстве сдвинуты одна по отношению к другой на 90°, осуществляется поперечное подмагничивание.
Продольное подмагничивание имеет ряд серьезных недостатков, основными из которых являются взаимная индуктивная связь двух обмоток и сильное искажение формы тока, потребляемого реактором из сети. Из-за магнитной связи в обмотке управления наводится переменная составляющая напряжения, что вынуждает принимать меры по ее ограничению, а искажение формы тока, потребляемого из сети, требует использования сложной системы компенсационных обмоток, в которых замыкается часть токов высших гармоник, и применения фильтров токов высших гармоник. Все это значительно усложняет конструкцию реактора.
В реакторах с поперечньим подмагничиванием перпендикуляр- ность осей двух обмоток исключает взаимную индуктивную связь, поэтому в обмотке управления отсутствует индуцированное переменное напряжение. Вольт-амперная характеристика такого реактора практически прямолинейна, содержание токов высших гармоник в токе главной обмотки менее 1 %. В то же время реакторы этого типа требуют значительно большего расхода активных материалов, чем неуправляемые реакторьТ, причем дополнительный расход этих материалов диктуется глубиной регулирования, При десятикратной глубине регулирования (10—100 %) расход активных материалов увеличивается более чем в 2 раза.
|
|
|
Следует отметить еще один тип реактора — реактор с вращающимся полем, где осуществляется так называемое кольцевое подмагничивание. Конструктивно он представляет собой синхронную машину с заторможенным ротором, на статоре которой размещена трехфазная главная обмотка, включаемая в сеть, на неподвижном роторе обмотка подмагничивания. За счет трехфазной обмотки статора в воздушном зазоре машины создается вращающееся магнитное поле. Этот реактор обеспечивает достаточную глубину регулирования и практически полное отсутствие высших гармоник в токе, потребляемом из сети. Такой реактор был разработан на мощность 100 Мвар при напряжении сети 35 кВ. Однако в силу ряда причин, одной из которых была его конструктивная сложность и невозможность изготовления на трансформаторных заводах из-за отсутствия необходимой оснастки, такие реакторы также не получили распространения.
Развитие силовой электроники, появление во второй половине ХХ столетия мощных тиристоров и силовых транзисторов позволило по- иному подойти к решению задачи управления мощностью шунтирующих реакторов, используемых в электроэнергетических системах.
Рассмотрим принцип управления мощностью реактора, последовательно с которым включен тиристорный ключ. Этот ключ представляет собой два тиристора, включенных встречно-параллельно (рис. 9. 2, а). Такая схема получила название тиристорно-реакторной группы (ТРГ). Моменты открытия тиристоров задаются системой управления, которая генерирует управляющие импульсы и подает их на управляющие электроды тиристоров. Фаза этих импульсов может изменяться от 0 до 90° за счет системы автоматического регулирования (регулятора).
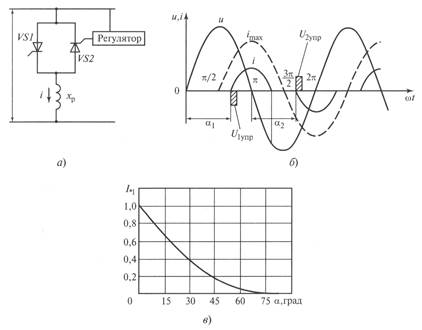
Рис. 9. 2. Графики регулировании реактора с помощью тиристорного ключа:
а — схема управления мощностью реактора; б — диаграмма токов и напряжений; в — зависимость тока первой гармоники от угла 
|
|
|
Если при значении угла  на тиристор
на тиристор  подать управляющий импульс
подать управляющий импульс  (рис. 9. 2, б), тиристор откроется, и через реактор начнет протекать ток, значение которого определяется уравнением
(рис. 9. 2, б), тиристор откроется, и через реактор начнет протекать ток, значение которого определяется уравнением
 (9. 2)
(9. 2)
где  — принужденная составляющая тока;
— принужденная составляющая тока;  — свободная составляющая тока.
— свободная составляющая тока.
В силу того что активное сопротивление обмотки реактора как силового элемента электрической сети незначительно, затухание свободной составляющей тока на протяжении первого полупериода частоты сети практически отсутствует. Поэтому эта составляющая может быть представлена в виде прямой, параллельной оси абсцисс. Через 180° аналогичный процесс начинается при включении тиристора  . Форма кривой результирующего тока фазы показана на рис. 9. 2, б. Изменяя значение угла
. Форма кривой результирующего тока фазы показана на рис. 9. 2, б. Изменяя значение угла  от 0 до 90°, можно изменять ток реактора от номинального до нуля, причем делать это практически мгновенно. Каждый следующий полупериод тиристоры могут открываться при новом значении угла . Недостатком этого способа является несинусоидальность тока фазы. Зависимость амплитудного значения тока первый гармоники (в относительвых единицах) от угла приведена на рис. 9. 2, в; за базисную величину здесь принята амплитуда принужденного тока через реактор. Для компенсации токов гармоник, кратных трем, ТРГ соединяются в треугольник; для компенсации токов других гармоник используются фильтры.
от 0 до 90°, можно изменять ток реактора от номинального до нуля, причем делать это практически мгновенно. Каждый следующий полупериод тиристоры могут открываться при новом значении угла . Недостатком этого способа является несинусоидальность тока фазы. Зависимость амплитудного значения тока первый гармоники (в относительвых единицах) от угла приведена на рис. 9. 2, в; за базисную величину здесь принята амплитуда принужденного тока через реактор. Для компенсации токов гармоник, кратных трем, ТРГ соединяются в треугольник; для компенсации токов других гармоник используются фильтры.
Такие тиристорно-реакторные группы могут быть созданы на большие мощности и на достаточно высокие напряжения (до 110 кВ). Сдерживающим фактором здесь является сложность создания тиристорных блоков на более высокие напряжения. Поэтому разработанные образцы таких реакторов на напряжения до 1150 кВ предполагают включение их через промежуточные трансформаторы и автотрансформаторы.
К этому же типу реакторов может быть отнесен управляемый шунтирующий реактор трансформаторного типа (рис. 9. 3), представляющий собой трансформатор специального изготовления с сопротивлением рассеяния, равным 100 %. Это означает, что при коротком замыкании на вторичной обмотке ток в первичной обмотке равен номинальному. Поэтому такой трансформатор идентичен реактору.
|
|
|
Трансформатор имеет три обмотки: первичную, включаемую в сеть, и две вторичные. На одну из вторичных обмоток включаются тиристорные блоки таким образом, что при открытии очередного тиристора на этой обмотке возникает короткое замыкание. При этом через первичную и вторичную обмотки протекает ток, не превышающий номинального значения. Длительность короткого замыкания определяется значением угла , изменением которого можно изменять ток, потребляемый из сети (точнее, действующее значение тока первой гармоники) так же, как в случае ТРГ. На другую вторичную обмотку включаются фильтры токов высших гармоник. В результате ток, потребляемый из сети, имеет синусоидальную форму. Такой реактор может быть непосредственно включен в сеть СВН без промежуточных трансформаторов.
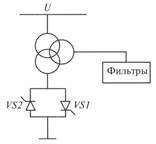
Рис. 9. 3. Управляемый шунтирующий реактор трансформаторного типа
Основным преимуществом реакторов с тиристорным регулированием является их высокое быстродействие, недостатком большая мощность управляемого устройства (тиристорных блоков). Тиристоры в закрытом состояния должны выдерживать амплитудное значение напряжения сети (фазного или междуфазного, в зависимости от схемы включения), в открытом — пропускать номинальный ток реактора. Это в конечном счете отражается на экономических показателях УШР.
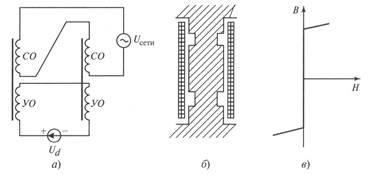
Рис. 9. 4. Реактор с магнитно-вентильным управлением:
а — схемы соединения сетевой и управляющей обмоток; б — магнитопровод разного сечения; в — аппроксимированная кривая намагничивания сердечника
Этого недостатка в значительной мере лишены реакторы с магнитно-вентильным управлением, разработанные и освоенные в России. Схемы соединения сетевой СО и управляющей УО обмоток приведены на рис. 9. 4, а. В этих реакторах используется эффект предельного насыщения стали за счет подмагничивания и специальной конструкции магнитопровода, в котором есть участки меньшего сечения (рис. 9. 4, 6). За счет тока подмагничивания (тока управления) рабочая точка реактора выводится на участок насыщения (рис. 9. 4, в), благодаря чему резко снижается индуктивное сопротивление сетевой обмотки и содержание токов высших гармоник в токе обмотки.
Благодаря такой схеме соединения в каждый полупериод происходит насыщение одного или двух стержней магнитопровода в зависимости от значения тока управления. В результате соответственно изменяется и сопротивление реактора от очень большого (применительно к аппроксимированной кривой намагничивания), равного бесконечности, до сравнительно небольшого, определяемого углом наклона участка кривой намагничивания в зоне насыщения. Эквивалентная схема такого реактора подобна схеме реактора с тиристорным управлением (см. рис. 9. 2). Ток управления создается управляемым тиристорным выпрямителем. Изменяя момент открытия вентилей выпрямителя, можно изменять ток управления и соответственно мощность, потребляемую реактором.
|
|
|
Реакторы с магнитно-вентильным управлением обладают большим диапазоном регулирования от 3—5 до 110—120 % номинальной мощности. Они имеют достаточно высокое быстродействие (максимальная скорость изменения мощности 300 Мвар/с), содержание токов высших гармоник в токе сетевой обмотки в стационарном режиме не превышает 3 %, мощность управляющей системы составляет 1—2 % номинальной мощности реактора, что существенно ниже, чем у реакторов с тиристорным управлением. Мощность реакторов с магнитно-вентильным управлением может достигать нескольких сотен мегавольт-ампер реактивных при напряжениях до 500 кВ что позволяет включать их непосредственно в сеть. Статическая характеристика реактора с магнитно-вентильным управлением приведена на рис. 9. 5.
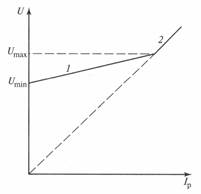
Рис. 9. 5. Статическая характеристика реактора с магнитно-вентильным управлением:
1 — регулируемый режим реактора; 2 — нерегулируемый режим
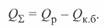
Статические компенсаторы реактивной мощности (СКРМ) основаны на использовании управляемых реакторов и конденсаторных батарей (рис. 9. 6, а). При параллельном их включении мощность всего устройства равна алгебраической сумме мощностей реактора и КБ:
 (9. 3)
(9. 3)
Изменяя мощность реактора или КБ, можно изменить мощность всего устройства и получить при этом как генерацию, так и потребление реактивной мощности СКРМ.

Рис. 9. 6. Статический компенсатор реактивной мощности:
а — схема СКРМ; б — статическая характеристика при  ; в — статическая характеристика при
; в — статическая характеристика при 
Если рассматривать регулируемый реактор и нерегулируемую конденсаторную батарею, то при равенстве их установленных мощностей результирующая мощность будет равна нулю. В процессе регулирования реактора его мощность снижается, и результирующая мощность будет носить емкостный характер. В пределе, когда мощность реактора будет близка к нулю, в сеть будет выдаваться только мощность КБ, т. е. эта схема может работать только в режиме генерации реактивной мощности. Статическая характеристика такого устройства приведена на рис. 9. 6, б.
Если данное устройство должно работать в режиме как генерации, так и потребления реактивной мощности, соотношение между мощностями реактора и КБ надо изменить. Мощность реактора в данном случае должна быть больше мощности КБ, например,  . В этом случае результирующая мощность будет изменяться в диапазоне
. В этом случае результирующая мощность будет изменяться в диапазоне  (рис. 9. 6, в).
(рис. 9. 6, в).
Статические компенсаторы, в которых реактор регулируется с помощью тиристорного ключа, получили название статических тиристорных компенсаторов (СТК).
Статический компенсатор реактивной мощности (Статком) является улучшенным аналогом синхронного компенсатора. Он создан на базе преобразователя нового типа, в котором используются полностью управляемые (запираемьте) тиристоры или силовые транзисторы. Этот статический компенсатор развивает свою ЭДС, которая может быть больше или меньше напряжения сети. В случае, если эта ЭДС больше напряжения сети, Статком генерирует реактивную мощность в сеть, если ЭДС меньше напряжения сети, он потребляет реактивную мощность из сети аналогично синхронному компенсатору. Изменение ЭДС в этом компенсаторе осуществляется за счет изменения моментов закрытия управляемых вентилей преобразователя. В отличие от синхронного компенсатора здесь мощность генерации и мощность потребления равны номинальной мощности Статкома. Следует также отметить, что изменение значения реактивной мощности как в режиме генерации, так и режиме потребления осуществляется практически безынерционно.
Преобразователь через трансформатор включен параллельно нагрузке в узле сети, к которому подключена линия. Работая в режиме генерации или потребления реактивной мощности, он стабилизирует напряжение в этом узле сети на заданном уровне. Его статическая характеристика идентична характеристике, приведенной на рис. 9. 6, в.
Управление передаваемой по линии мощностью может осуществляться изменением фазного угла сдвига между напряжениями по концам линии. Для этой цели используются фазоповоротные устройства (ФПУ), включаемые в начале линии последовательно.
Для создания ФПУ используется то обстоятельство, что напряжение каждой фазы сдвинуто по отношению к межфазному напряжению двух других фаз на 90°. ФПУ состоит из двух трансформаторов: последовательного 1 и возбуждающего 2. Первичная обмотка возбуждающего трансформатора включена на междуфазное напряжение фаз В и С (рис. 9. 7, а); эта обмотка имеет ответвления, которые могут переключаться с помощью устройства, аналогичному устройству РПН. Обмотка имеет также контакторы, с помощью которых изменяется полярность напряжения.
Вторичная обмотка возбуждающего трансформатора соединена со вторичной обмоткой последовательного трансформатора, первичная обмотка которого включена в фазу А линии. В результате напряжение в начале линии, создаваемое первичной обмоткой последовательного трансформатора (рис. 9. 7, 6), есть векторная сумма двух напряжений:  и
и  . В результате напряжение фазы А в начале линии смещается по отношению к напряжению шин, к которым подключена линия, на некоторый угол
. В результате напряжение фазы А в начале линии смещается по отношению к напряжению шин, к которым подключена линия, на некоторый угол  .
.
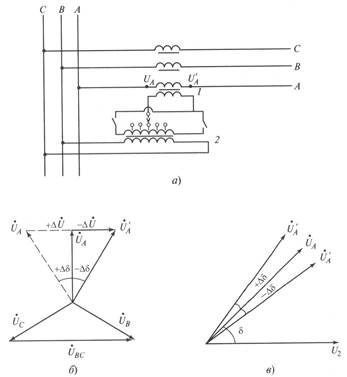
Рис. 9. 7. Фазоповоротное устройство:
а — схема ФПУ; б — векторная диаграмма ФПУ; в — векторная диаграмма линии
Угол между напряжениями по концам линии

Угол  может регулироваться как по значению, так и по знаку, поэтому угол
может регулироваться как по значению, так и по знаку, поэтому угол  может изменяться в сторону как увеличения, так и уменьшения.
может изменяться в сторону как увеличения, так и уменьшения.
Аналогичные устройства установлены и в других фазах. Поэтому напряжение в начале линии может смещаться на угол  относительно напряжения конца линии
относительно напряжения конца линии  (рис. 9. 7, в), а значит, будет изменяться и передаваемая по линии мощность.
(рис. 9. 7, в), а значит, будет изменяться и передаваемая по линии мощность.
Такая схема получила название схемы поперечного регулирования. Она известна в практике. В качестве фазоповоротного устройства используется автотрансформатор, в котором дополнительным механизмом служит устройство РПН автотрансформатора. Основной недостаток такой схемы заключается в малом быстродействии, что объясняется использованием электромеханических переключателей.
Электромеханические переключатели могут быть заменены средствами силовой электроники (рис. 9. 8). В этом случае первичная обмотка возбуждающего трансформатора соединена в треугольник и подключена к шинам, к которым подсоединена линия. Вторичная обмотка этого трансформатора состоит из нескольких отдельных секций; все они имеют разное количество витков и, следовательно, разное напряжение. Каждая секция подключена к двум тиристорным ключам, состоящим из четырех тиристоров. Через тиристорные ключи каждая из секций соединена с вторичной обмоткой последовательного трансформатора, первичная обмотка которого включена в линию. Работа тиристорных ключей организована таким образом, что полярность вторичной обмотки последовательного трансформатора может изменяться.
Если напряжения секций соотносятся, например, как 1: 3: 9, то, используя различные комбинации включенных секций, можно иметь 27 ступеней регулирования угла сдвига выходного напряжения.
Блоки тиристорных ключей имеют систему управления, на вход которой подаются параметры режима (угол  , мощность линий и др. ) и заданные значения регулируемых величин (уставки), на выходе имеется система команд на включение соответствующих комбинаций тиристорных ключей.
, мощность линий и др. ) и заданные значения регулируемых величин (уставки), на выходе имеется система команд на включение соответствующих комбинаций тиристорных ключей.
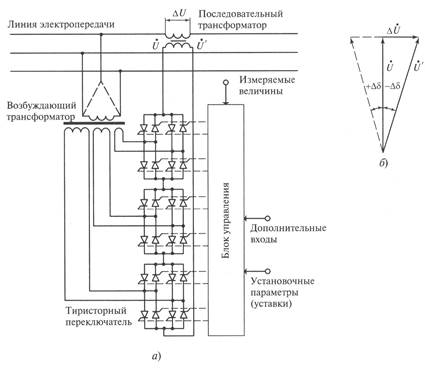
Рис. 9. 8. Схема полупроводникового фазоповоротного устройства:
а — схема ФПУ; б — векторная диаграмма
|
|
|
