 |


Типовые динамические звенья. Усилительное звено
|
|
|
|
Получая передаточные функции различных по конструкции и назначению объект управления и элементов автоматики, было замечено, что их динамику определяют ограниченное число типовых звеньев. Каждое такое типовое звено отражает в структурной схеме какую-либо одну особенность поведения элементов в динамике, например, колебательность, инерционность, запаздывание и т. п.
Типовые звенья своими сочетаниями позволяют описать динамику любой САУ. Зная из каких типовых звеньев состоит структурная схема можно прогнозировать ее каественное поведение в динамики.
К типовым звеньям относят: усилительное, инерционное, колебательное, интегрирующее, дифференцирующие звенья, а также звено с постоянным транспортным запаздыванием (описание типовых звеньев было изложено в лекциях).
Тип звена однозначно определяется видом передаточной функции. Переходные процессы и частотные характеристики различных типов звеньев также имеют свои особенности, которые позволяют однозначно идентифицировать тип элемента. Параметры звеньев находят свое отражение и в передаточной функции элемента (коэффициенты усиления и постоянные времени) и на экспериментально получаемых графиках динамических характеристик.
Инерционное звено
| 
|
| АЧХ | Логарифмически-частотная характеристика |
 АФХ
АФХ
Интегрирующее звено


Дифференцирующее звено


Звено с постоянным транспортным запаздыванием


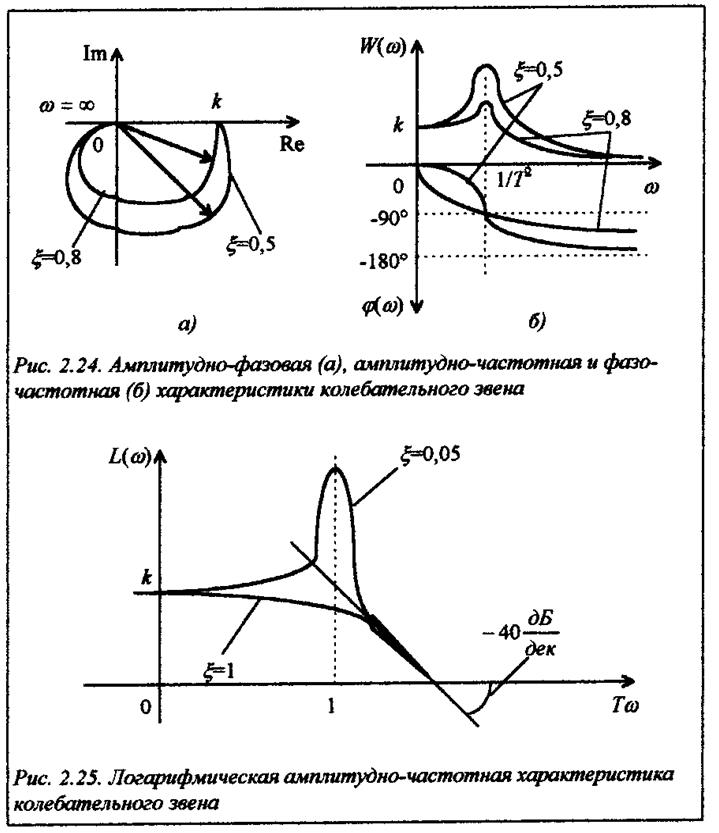
Колебательное звено

Линейные системы автоматического управления. Принцип суперпозиции
Наиболее общей и наиболее полной формой математического описания автоматических систем и их элементов является дифференциальное уравнение вида a0 d ny(t)/dt n a1d n-1y(t)/dt n-1... any(t) =b0d mx(t)/dtm b1d m-1x(t)/dtm-1... bm x(t), где x(t) и y(t) – входная и выходная величины элемента или системы; ai , bi – коэффициенты уравнения. Это уравнение устанавливает связь между входной и выходной величиной как в переходных, так и в установившихся режимах. Коэффициенты дифференциального уравнения называются параметрами. Они зависят от различных физических констант, характеризующих скорость протекания процессов в элементах.
|
|
|
Любые преобразования сигналов сопровождаются изменением их спектра и по характеру этих изменений разделяются на два вида: линейные и нелинейные. Линейные системысоставляют основной класс систем обработки сигналов. Термин линейности означает, что система преобразования сигналов должна иметь произвольную, но в обязательном порядке линейную связь между входным сигналом (возбуждением) и выходным сигналом (откликом). В нелинейных системах связь между входным и выходным сигналом определяется произвольным нелинейным законом.
Для автоматических систем управления, описываемых линейным уравнением, справедлив принцип наложения или суперпозиции, согласно которому изменение выходной величины y(t), возникающее при действии на систему нескольких входных сигналов xi(t), равно сумме изменений yi(t) величины y(t), вызываемых каждым сигналом в отдельности. Иногда параметры некоторых элементов систем изменяются во времени. Такую систему называют нестационарной или системой с переменными параметрами.
Система считается линейной, если в пределах установленной области входных и выходных сигналов ее реакция на входные сигналы аддитивна (выполняется принцип суперпозиции сигналов) и однородна (выполняется принцип пропорционального подобия).
17 Виды соединений звеньев САУ
Последовательное соединение динамических звеньев.



|
|
|
|
|
|
