 |


Реверсирование электродвигателей постоянного тока.
|
|
|
|
В основном, управление двигателями постоянного тока происходит по 2-х проводной линии. В случае необходимости смены направления вращения требуется поменять местами провода либо на якоре либо на обмотке возбуждения. Для этого можно использовать различные коммутационные приборы. Однако, в случае удаленного управления двигателями и смене полярности питания изменится полярность и на якоре и на статоре. В итоге двигатель не изменит своего направления вращения. Протягивать отдельные пары для якоря и статора не представляется целесообразным. В таких случаях лучше использовать предлагаемые на рис.1 - 3 двухпроводные схемы удаленного управления. В таких схемах используется свойство выпрямителя не менять полярность своего напряжения на выходе при смене полярности на его входе.



На рис.1 показана схема управления двигателя с параллельным возбуждением. Здесь при смене полярности питания двигателя переключателем SA сменится полярность напряжения на якоре двигателя. А вот обмотка возбуждения Wв сохранит свою полярность питания. С электрической точки зрения разницы нет, что включать в линию подачи питания, а что запитывать с выпрямителя - якорь или обмотку возбуждения. Однако, в цепи обмотки возбуждения течет ток меньший, чем через якорь, да к тому же и при пуске в ней отсутствуют броски пускового тока. Поэтому для такого включения легче подобрать диоды с небольшим током пропуска, чем для якоря.
На рис.2 - схема управления двигателя с последовательным возбуждением. Поскольку в таких двигателях обмотка возбуждения включена последовательно с якорем, то нет разницы что включать в диагональ моста - ток везде один и тот же.
|
|
|
На рис.3 изображена схема управления двигателя со смешанным возбуждением. Здесь полярность изменяется только на параллельной обмотке возбуждения. Последовательная обмотка с якорем включены в диагональ моста.
Необходимо помнить, что все приведенные схемы относятся к схемам безреостатного пуска и применяются для двигателей мощностью 0,7...1кВт. У них из-за повышенного сопротивления обмотки якоря значения пусковых токов превышают номинальный в 3...5 раз, что не является опасным для данных схем. Для тех двигателей, чья мощность превышает указанную, включают пускорегулирующее сопротивление(на рис.1 показан пунктиром). Величину пускового тока ограничивают на уровне (1,5..2)*Iном, где Iном - номинальный ток якоря. Величину пускового реостата определяют по формуле: Rп = (U/1.5...2)*Iном - Rа, где U - напряжение источника, Rа - сопротивление источника якоря, включая сопротивление добавочных полюсов и щеток. Эта величина берется либо из справочных данных либо вычисляется по формуле: Rа = U(1 - ηном)/2Iном, где ηном - КПД двигателя.
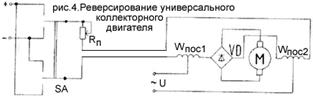
На рис.4 показана схема реверсирования универсального коллектороного двигателя. Эти двигатели могут работать как от постоянного напряжения, так и от сети однофазного переменного тока. Изготавливаются машины, как правило, с последовательным возбуждением, хотя есть модели и с параллельным. Конструктивно двигатель представляет машину коллекторного типа. При работе от сети постоянного тока в цепь якоря включается вся обмотка, а при питании переменным током только часть ее из-за появления индуктивного сопротивления обмотки возбуждения и якоря. Из-за "сложности" выполнения обмотки возбуждения при двухпроводном подключении к сети наиболее простым способом реверсирования будет включение обмотки якоря в диагональ молста по постоянному току. В результате изменения полярности подачи питания полярность изменится только на обмотках возбуждения, что и приведет к реверсированию.
|
|
|
