 |


Теоретические сведения к выполнению работы
|
|
|
|
Измеритель ПИД-регулятор микропроцессорный одноканальный ТРМ10 совместно с первичным преобразователем (датчиком) предназначен для измерения и регулирования температуры и других физических параметров, значение которых внешним датчиком может быть преобразовано в сигналы постоянного тока или напряжения.
Прибор позволяет осуществлять следующие функции:
- измерение температуры или других физических величин (давления, влажности, расхода, уровня и т.п.) в одной точке с помощью стандартного датчика, подключаемого к универсальному входу прибора;
- регулирование измеряемой величины по пропорционально-интегрально-дифференциальному (ПИД) закону;
- отображение текущего измерения на встроенном светодиодном цифровоминдикаторе;
- автоматическое определение коэффициентов ПИД-регулятора (автонастройка);
- формирование управляющего воздействия на Выходе 1 с помощью выходного аналогового сигнала (при использовании в качестве выходного устройства цифро-аналогового преобразователя (ЦАП)) или широтно-импульсной модуляции (ШИМ) (при использовании дискретного выходного устройства);
- формирование на Выходе 2 дополнительного сигнала управления по двухпозиционному закону или сигнала «Авария».
Функциональная схема прибора ТРМ10 приведена на рис.2.1
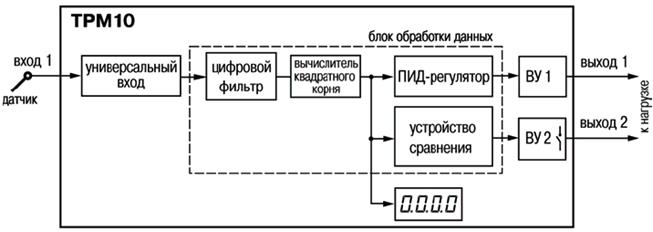
Рис.2.1. Функциональная схема прибора ТРМ10
Прибор содержит канал универсального входа для подключения первичного преобразователя (датчика), блок обработки данных, четырехразрядный светодиодный цифровой индикатор и выходные устройства (ВУ), предназначенные для управления внешним оборудованием. Блок обработки данных включает в себя цифровой фильтр, вычислитель квадратного корня, ПИД-регулятор, устройство сравнения. ПИД-регулирование осуществляется посредством ВУ1. При необходимости дополнительного двухпозиционного регулирования или для организации аварийной сигнализации следует использовать устройство сравнения и связанное с ним ВУ2.
|
|
|
Для ослабления влияния внешних импульсных помех на эксплуатационные характеристики прибора в программу его работы введена цифровая фильтрация результатов измерений.
Фильтрация осуществляется в два этапа.
На первом этапе фильтрации из текущих измерений входных параметров отфильтровываются значения, имеющие явно выраженные «провалы» или «выбросы». Для этого прибор вычисляет разность между результатами измерений входной величины, выполненных в двух последних циклах опроса, и сравнивает ее с заданным значением, называемым «полосой фильтра». Если вычисленная разность превышает заданный предел, то производится повторное измерение, полученный результат отбрасывается, а значение полосы фильтра удваивается. В случае подтверждения нового значения фильтр перестраивается (т.е. полоса фильтра уменьшается до исходной) на новое стабильное состояние измеряемой величины. Такой алгоритм позволяет защитить прибор от воздействия единичных импульсных и коммутационных помех, возникающих на производстве при работе силового оборудования.
Полоса фильтра задается в единицах измеряемой величины параметром b1-8. Следует иметь в виду, что чем меньше значение полосы фильтра, тем лучше помехозащищенность измерительного канала, но при этом (из-за возможных повторных измерений) хуже реакция прибора на быстрое фактическое изменение входного параметра. Поэтому при задании полосы фильтра следует учитывать максимальную скорость изменения контролируемой величины, а также установленную для используемого датчика периодичность опроса.
При необходимости фильтр может быть отключен установкой нулевого значения параметра b1-8.
|
|
|
На втором этапе фильтрации осуществляется сглаживание (демпфирование) сигнала с целью устранения шумовых составляющих.
Основной характеристикой сглаживающего фильтра является «постоянная времени фильтра» – интервал, в течение которого изменение выходного сигнала фильтра достигает 0.63 от изменения входного сигнала.
Постоянная времени фильтра задается в секундах параметром b1-9. Следует помнить, что увеличение значения постоянной времени фильтра улучшает помехозащищенность канала измерения, но одновременно увеличивает его инерционность, т. е. реакция прибора на быстрые изменения входной величины замедляется. При необходимости фильтр может быть отключен установкой нулевого значения параметра b1-9.
Для устранения начальной погрешности преобразования входных сигналов и погрешностей, вносимых соединительными проводами, измеренные и отфильтрованные прибором значения могут быть откорректированы. Погрешности выявляются при проведении метрологических испытаний и устраняются путем ввода корректирующих значений. В приборе есть два типа коррекции, с помощью которых можно осуществлять сдвиг и изменение наклона
измерительной характеристики.
Сдвиг характеристики осуществляется путем прибавления к измеренной величине значения, заданного параметром b1-1. Значения сдвига характеристики
датчика задаются в единицах измерения физической величины и служат для компенсации погрешностей, вносимых сопротивлениями подводящих проводов (при подключении термометров сопротивления по двухпроводной схеме), а также при отклонении у термометра сопротивления значения R0.
Пример сдвига измерительной характеристики графически представлен на рис. 2.2а.
Изменение наклона характеристики осуществляется путем умножения измеренной (и скорректированной «сдвигом», если эта коррекция необходима) величины на поправочный коэффициент α, значение которого задается параметром b1-2.
Данный вид коррекции используется, как правило, для компенсации погрешностей самих датчиков (например, при отклонении у термометров сопротивления параметра α от стандартного значения) или погрешностей, связанных с разбросом сопротивлений шунтирующих резисторов (при работе с преобразователями, выходным сигналом которых является ток).
|
|
|
Значение поправочного коэффициента α задается в безразмерных единицах в диапазоне от 0.900 до 1.100 и перед установкой может быть определено по формуле:
α = Пфакт / Пизм,
где
α – значение поправочного коэффициента, устанавливаемого параметром;
Пфакт – фактическое значение контролируемой входной величины;
Пизм – измеренное прибором значение той же величины.
Пример изменения наклона измерительной характеристики графически представлен на рис. 2.2 б.
Определить необходимость введения поправочного коэффициента можно, измерив максимальное или близкое к нему значение параметра, где отклонение наклона измерительной характеристики наиболее заметно.

а) б)
Р и с. 2.2 Коррекция значений
а – сдвиг характеристики, б – наклон характеристики
Прибор конструктивно выполнен в пластмассовом корпусе, предназначенном для щитового или настенного крепления.
Все элементы прибора размещены на двух печатных платах. На лицевой панели расположены клавиатура управления прибором, цифровой индикатор и светодиоды, на задней – силовая и измерительная части, а также присоединительный клеммник.
На рис. 2.3, а приведен внешний вид лицевой панели прибора для корпусов настенного Н и щитового крепления Щ1, на рис. 2.3, б – щитового Щ2. На лицевой панели расположены элементы управления и индикации.

Рис.2.3. Внешний вид прибора ТРМ10
а – корпус настенного и щитового (Щ1) крепления,
б – корпус щитового (Щ2) крепления,
Четырехразрядный цифровой индикатор, предназначенный для отображения значений измеряемых величин и функциональных параметров прибора.
Восемь светодиодов красного свечения сигнализируют о различных режимах работы:
- светодиоды «К1» и «К2» сигнализируют о включении выходных устройств ПИД-регулятора (только для выхода дискретного типа) и устройства сравнения,соответственно;
- светодиоды «Т», «τИ», «τД», «ХР», «С1» и «С2» засвечиваются в режиме ПРОГРАММИРОВАНИЕ и сигнализируют о том, какой параметр выбран для редактирования.
|
|
|
Кнопка  предназначена для входа в режим ПРОГРАММИРОВАНИЕ, а также для записи новых установленных значений в энергонезависимую память прибора.
предназначена для входа в режим ПРОГРАММИРОВАНИЕ, а также для записи новых установленных значений в энергонезависимую память прибора.
Кнопка  предназначена для выбора программируемого параметра и увеличения его значения. При удержании кнопки скорость изменения возрастает.
предназначена для выбора программируемого параметра и увеличения его значения. При удержании кнопки скорость изменения возрастает.
Кнопка  предназначена для выбора программируемого параметра и уменьшения его значения. При удержании кнопки скорость изменения возрастает.
предназначена для выбора программируемого параметра и уменьшения его значения. При удержании кнопки скорость изменения возрастает.
Входное измерительное устройство в приборе является универсальным, т.е. к нему можно подключать любые первичные преобразователи (датчики). К входу прибора можно подключить одновременно один датчик.
В качестве датчиков могут быть использованы:
- термометры сопротивления;
- преобразователи термоэлектрические;
- активные преобразователи с выходным аналоговым сигналом в виде постоянного напряжения или тока.
Активные преобразователи с выходным аналоговым сигналом в виде постоянного напряжения (–50...50 мВ, 0...1 В) или тока (0...5 мА, 0...20 мА, 4...20 мА) могут быть использованы для измерения как температуры, так и других физических величин: давления, расхода, уровня и т. п.
ПИД-регулирование является наиболее точным и эффективным методом поддержания контролируемой величины на заданном уровне. На рис. 2.4 приведена функциональная схема ПИД-регулятора. Основное назначение регулятора – формирование управляющего сигнала Y, задающего выходную мощность исполнительного механизма (ИМ) и направленного на уменьшение рассогласования Е или отклонения текущего значения регулируемой величины Т от величины уставки Туст. В операторной форме формула ПИД-регулятора выглядит следующим образом: 
Как следует из формулы, ПИД-регулятор состоит из трех основных частей:
пропорциональной Кп, интегральной 1/(р⋅Ти) и дифференциальной р⋅Тд. На практике, для формирования цифровых регуляторов используются разностные формулы, позволяющие работать не с непрерывным во времени сигналом, а с квантованным по времени. Таким образом, для расчета управляющего сигнала на выходе цифрового ПИД-регулятора используется формула:

где
Xp – полоса пропорциональности;
Ei – рассогласование или разность между уставкой Туст и текущим значением измеренной величины Тi;
τд– дифференциальная постоянная;
ΔEi – разность между двумя соседними рассогласованиями Ei и Ei–1;
Δtизм – время между двумя соседними измерениями Ti и Ti–1;
τи– интегральная постоянная;
 – накопленная в i -й момент времени сумма рассогласований (интегральная сумма).
– накопленная в i -й момент времени сумма рассогласований (интегральная сумма).
|
|
|
Пропорциональная составляющая зависит от рассогласования Ei и отвечает за реакцию на мгновенную ошибку регулирования.
Интегральная составляющая содержит в себе накопленную ошибку регулирования  и позволяет добиться максимальной скорости достижения уставки.
и позволяет добиться максимальной скорости достижения уставки.
Дифференциальная составляющая зависит от скорости изменения рассогласования ΔEi/Δtизм и позволяет улучшить качество переходного процесса.
Время между соседними измерениями Δtизм определяется временем опроса одного канала измерения.
Для эффективной работы необходимо для конкретного объекта управления подобрать коэффициенты ПИД-регулятора: Хр, τи и τд. Это возможно сделать вручную или использовать автонастройку.
Для формирования корректного управляющего сигнала ПИД-регулятора необходимо задать тип исполнительного устройства: нагреватель или холодильник (параметр А1-4). Нагревателем условно называют устройство, при включении которого увеличивается значение измеряемого параметра. Холодильником называют устройство, при включении которого уменьшается значение измеряемого параметра. Вид управляющего сигнала на выходе прибора зависит от типа выходного устройства. Прибор выдает либо управляющий сигнал в виде постоянного тока или напряжения (для аналоговых ВУ), либо в виде ШИМ-сигнала (для дискретных ВУ).
В отличие от аналогового выхода, у которого выходной сигнал непрерывен во времени, выходной сигнал дискретного ВУ преобразуется в последовательность импульсов (рис. 2.4) согласно следующей формуле:

где
D – длительность импульса, [с]
Тсл - период следования импульсов, [с]
Y – сигнал на выходе ПИД-регулятора, [%].

Рис.2.4. Выходной сигнал дискретного ВУ
Период следования импульсов Тсл зависит от параметров пускового оборудования исполнительного механизма и задается параметром А1-5. Малое значение Тсл приводит к частым коммутациям и быстрому износу силовых контактов, а большое значение – к ухудшению качества регулирования.
В зависимости от встроенного дискретного ВУ, необходимо установить минимальную длительность импульса ШИМ, которая задается параметром А1-8.
Для исключения излишних срабатываний регулятора при небольшом значении рассогласования Ei для вычисления значений Yi используется уточненное значение EР, вычисленное в соответствии с условиями:
если | Ei | < Xd, то EР = 0;
если Ei > Xd, то EР = Ei – Xd;
если Ei < – Xd, то EР = Ei + Xd,
где Xd – зона чувствительности (рис. 2.5).
Зона нечувствительности задается параметром А1-2.
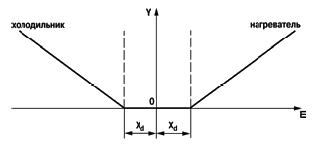
Рис.2.5. Статическая характеристика прибора
Устройство сравнения предназначено для двухпозиционного регулирования или сигнализации о входе или выходе за установленные пределы измеряемой величины.
Устройство сравнения работает по одному из представленных на рис.2.6 типов логики:
- тип логики 1 (прямой гистерезис) применяется в случае использования прибора для управления работой нагревателя (например, ТЭНа). При этом выходное устройство, подключенное к устройству сравнения, первоначально включается при значениях Т < С1, выключается при Т > С2 и вновь включается при Т < С1, осуществляя тем самым двухпозиционное регулирование в пределах (С2 – С1);
- тип логики 2 (обратный гистерезис) применяется в случае использования прибора для управления работой охладителя (например, вентилятора). При этом выходное устройство первоначально включается при значениях Т > С2, а выключается при Т < С1;
- тип логики 3 (П-образная) применяется при использовании прибора для сигнализации о входе контролируемой величины в заданные границы. При этом выходное устройство включается при С1 < Т < С2;
- тип логики 4 (U-образная) применяется при использовании прибора для сигнализации о выходе контролируемой величины за заданные границы. При этомвыходное устройство включается при Т > С2 и Т < С1.

Р и с. 2.6. Режимы работы устройства сравнения
а) – тип логики 1 (прямой гистерезис);
б) - тип логики 2 (обратный гистерезис);
в) - тип логики 3 (П-образная);
г) - тип логики 4 (U-образная).
В приборе установлено два уровня программирования. На первом уровне осуществляется просмотр и изменение значений параметров регулирования: уставки ПИД-регулятора (Т), нижней (С1) и верхней (С2) уставок компаратора, а также коэффициентов ПИД-регулятора: Xр, τи и τд. Вход на первый уровень программирования осуществляется кратковременным (около 1 секунды) нажатием на кнопку . Последовательность работы с прибором на первом уровне программирования приведена на рис. 2.7.

Рис.2.7. Последовательность работы с прибором на первом уровне программирования
На втором уровне программирования осуществляется просмотр и необходимое изменение функциональных параметров прибора. Функциональные параметры прибора разделены на группы А и b. В группе А находятся параметры, определяющие логику работы прибора. В группе b – параметры, отвечающие за настройку измерительной части прибора.
Режим самонастройки предназначен для автоматического определения оптимальных значений коэффициентов ПИД-регулятора: τи, τд и Хр. Самонастройку рекомендуется проводить при пуске и наладке системы, а также при значительном изменении характеристик объекта (загрузки печи объема нагреваемой жидкости, мощности нагревательного элемента и т.п.).
Вход в режим самонастройки осуществляется из первого уровня режима "установка параметров" через код доступа 8206. После набора кода и нажатия кнопки регулятор выдает непрерывный максимальный выходной сигнал (У=100%) (реле замыкается, ЦАП выдает максимальный ток 20 мА) и начинают мигать светодиоды τи, τд и Хр. Как только скорость изменения регулируемого параметра начнет уменьшаться, процесс самонастройки заканчивается, мигающая засветка светодиодов τи, τд и Хр меняется на непрерывную, регулятор выключается и вычисляет коэффициенты ПИД-регулятора: полосу пропорциональности Хр, постоянную времени дифференцирования Тд| постоянную времени интегрирования Ти и максимально возможный период следования ШИМ импульсов Тсл. После окончания самонастройки необходимо нажатием кнопки перевести прибор в режим "установка параметров", в котором можно просмотреть и скорректировать полученные значения коэффициентов.
Возможно определение параметров ПИД – регулятора вручную. Для этого выберите и установите в соответствующем параметре приемлемое значение периода следования импульсов ШИМ, имея ввиду, что увеличение периода импульсов ведет к ухудшению качества регулирования.
Установите значения (τи), (τд) и (Хр) равными 0. Установите значение (Т) равное тому, которое в дальнейшем будет поддерживать прибор.
После перехода в режим регулирования исполнительный механизм будет включен до тех пор, пока не будет достигнута уставка (Т).
Измерьте (tо) - время от момента включения исполнительного механизма (нагревателя или охладителя) до момента изменения температуры на 1 градус.
После выключения исполнительного механизма температура будет изменяться по инерции. Определите величину (h) - максимального отклонения температуры от уставки.
После того как, температура вновь станет ниже уставки (Т), установите значение (Хр) равным (2h). Убедитесь, что при данном значении (Хр) не происходит достижения уставки (Т). В противном случае увеличивайте значение (Хр).
Если при данном значении Хр разница между установившейся температурой и уставкой (Т) слишком велика, то значение (Хр) следует уменьшить.
Установите значение (τи) равным (3tо). Убедитесь, что при данном значении (τи) не возникают колебания температуры вокруг уставки.
Увеличение значения (τи) ведет к уменьшению колебаний.
Уменьшение значения (τи) ведет к увеличению скорости выхода на уставку.
Полученное в предыдущем пункте значение τи разделите на 5 и запишите результат в параметр τд.
Для улучшения эксплуатационных качеств в блок обработки входных сигналов введен цифровой фильтр, позволяющий уменьшить влияние случайных помех на измерение контролируемых величин. Работа фильтра описывается параметром "глубина фильтра".
В этом параметре задается количество последних (N) измерений, из значений которых прибор вычисляет среднее арифметическое. Полученная величина поступает на входы ПИД-регулятора и устройства сравнения. При значении параметра равном 0 и 1 фильтр выключен. Действие параметра "глубина фильтра" показано на рис. 2.8. Уменьшение значения (N) приводит к более быстрой реакции прибора на скачкообразные изменения контролируемой величины, но снижает помехозащищенность измерительного тракта. Увеличение значения (N) приводит к улучшению помехозащищенности, но вместе с этим повышает инерционность прибора.

Р и с.2.8. Действие параметра «глубина фильтра»
Порядок выполнения работы
Устройство начальной установки регулирования включает нагрузку на некоторый заданный уровень. В данной работе в качестве нагрузки служит электрическая лампочка, которую можно рассматривать как осветитель или имитатор нагревательных элементов.В качестве датчика используется термопара храмель-алюмель (ТХА(К)). Обратная связь осуществляется по линии лампа – термопара. Сопротивление R3 служит для нормирования входного напряжения ТРМ10 в диапазоне 0…1В, которое настраивается один раз и на лицевую панель стенда не выводится. Сопротивление R1 служит для установки максимальной яркости и влияет на фронт импульса регулировки с выхода датчика. Сопротивление R2 служит для минимального значения светимости лампы и влияет задний фронт регулировки с выхода датчика.
После включения установки происходит регулирование температуры (или интегральной светимости) лампы в зависимости от параметров установок ТРМ10.
Функциональная схема лабораторной работы приведена на рис. 2.9.

Рис. 2.9. Функциональная схема лабораторной работы
Необходимо определить параметры в режиме ручной настройке, в режиме самонастройки в зависимости от значения температуры уставки, заданной в варианте.
После определения параметров регулятора снять динамические характеристики (записывать показания прибора через равные промежутки времени, например каждые 10 секунд в течение 5 минут и по полученным значениям построить график зависимости температуры от времени).
Перейти в режим компаратора, задать значения для компаратора (С1 и С2) и также снять динамическую характеристику.
Содержание отчёта
1. Название работы
2. Цель работы
3. Краткое описание устройства и работы измерителя –регулятора ТРМ10
4. Схему лабораторной работы
5. Параметры регулятора для режимов ручной и автоматической настройки
6. Графики динамических характеристик
Контрольные вопросы
1. Назначение и функции измерителя-регулятора ТРМ10?
2. Устройство прибора ТРМ10?
3. В чём заключается режим ручной настройки параметров ПИД-регулятора?
4. В чём заключается режим автоматической настройки параметров ПИД-регулятора?
5. Что такое цифровой фильтр?
6. В чём заключается корректировка значений
7. Какие режимы работы логического устройства вы знаете?
8. От чего зависят пропорциональная, интегральная и дифференциальные составляющие ПИД-закона регулирования?
Варианты задания
| Номер варианта | Параметры регулирования | |
| Режим Пид-регулятора | Режим компаратора | |

| 
| |

| 
| |

| 
| |

| 
| |

| 
|
Лабораторная работа №3
Исследование переходного процесса в СУ температурой с помощью ПИД-регулятора ОВЕН ТРМ 151-05
Цель работы: исследовать работу программного регулятора ОВЕН ТРМ 151 в одноконтурной системе управления температурой.
|
|
|
