 |


Построение четвертого листа
|
|
|
|
К вычерчиванию зубчатой передачи приступают после выполнения расчетов ее геометрических параметров (вручную, по формулам, приведенным в табл. 1.2, либо по программе ТММ2).
Графические построения проводятся раздельно для зацеплений без смещения и со смещением в следующей последовательности (рис. 3.7). На одном листе формата А1 располагаются станочное, нулевое и зацепление со смещением.
Последовательность выполнения:
1. Выбирается масштаб построения таким образом, чтобы высота зуба h на чертеже была не менее 40+50 мм. При этом масштабный коэффициент
 .
.
2. Пересчитываются все геометрические параметры зацепления rфакт (см. табл. 1.2) в чертежные размеры rчерт с учетом выбранного масштабного коэффициента
rчерт = rфакт / µr.
3. Выбирается положение центров О1 и О2 осей зубчатых колес Z1 и Z2. Расстояние между осями равно аw. В ряде случаев (при большом Z2) допускается расположение центра О2 вне формата чертежа.
4. Из центров О1 и О2 проводятся окружности, радиусы которых соответствуют:
- начальным окружностям rw1 и rw2, касающимся в полюсе П;
- делительным окружностям r1 и r2, расстояние между которыми равно воспринимаемому смещению у·m. Для передач без смещения (х1 = x2 =0) делительные и начальные окружности совпадают;
- окружностям вершин ra1 и ra2, окружностям впадин rf 1 и rf 2, расстояния между которыми равны радиальным зазорам с = с*·m;
- основным окружностям rb 1 и rb 2.
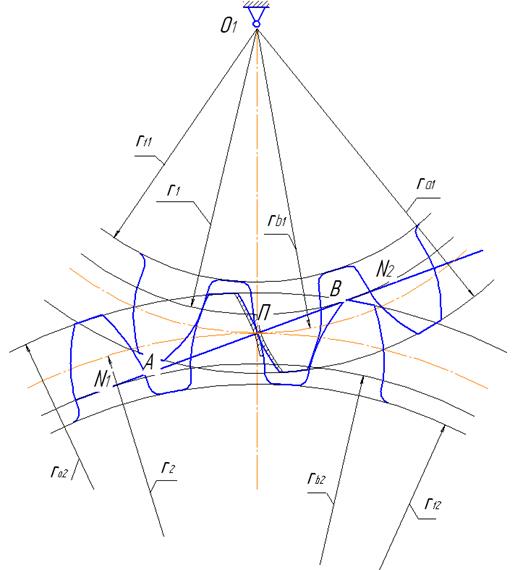
Р и с. 3.7. Беззазорное зацепление
На боковой панели выбирается «Геометрия» – «вертикальная линия» – «отрезок» – на панели свойств задается длина расстояния O1 и О2 откладывается на вертикальной прямой.
Из точки О1 проводятся дуги радиусом rw1 ,r1, ra1, rf1, rb1. Из точки О2 проводятся дуги радиусом rw2 ,r2 ,ra2 ,rf2 , rb2. Для этого выполняются команды «Геометрия» – «дуга» – центр точка О1 – на панели свойств радиус (устанавливается длина радиуса). Точку касания дуг радиусами делительных окружностей следует обозначить полюс зацепления.
|
|
|
5. Проводится линия зацепления N1N2. Она должна проходить через полюс зацепления П под углом αw к линии, перпендикулярной межосевой линии О1О2, и при этом быть касательной к основным окружностям rb1 и rb2. Положение точек N1 и N2 в ряде случаев удобно определить из условия, что радиусы О1N1 и O1N1 образуют с линией зацепления N1N2 прямые углы.
6. Находится активный участок линии зацепления АВ. Точки А и В являются точками пересечения N1 N2 с окружностями вершин ra1 и ra2.
Последовательность построения зуба в системе КОМПАС ЗD (рис. 3.8).Проводим вертикальную ось симметрии зуба. На оси выбирается произвольная точка, из которой будут проводиться дуги окружностей. Выполняем команды: «геометрия» – «вертикальный отрезок» – на панели свойств стиль «осевая» – «Stор».
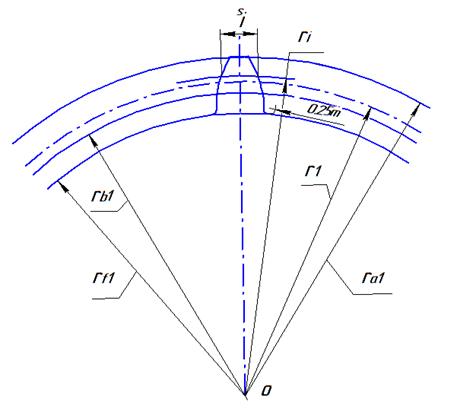
Р и с. 3.8. Построение зуба
Для построения зуба используются расчётные значения толщины зуба Si в зависимости от радиуса ri получаемые по программе ТММ2, которые следует пересчитать с учётом масштаба. Последовательно проводим дуги радиуса ri (i=1,2, 11) и откладываем на каждой дуге по обе стороны от оси симметрии соответствующую половину толщины зуба S/2. Команды: «Дуга», щелчком мышки указываем центр окружности, на панели свойств задаём радиус ri – откладываем дугу – «Stoр». Построена дуга. Откладываем толщину зуба: «точка на заданном расстоянии по дуге» – на панели свойств ставим расстояние равное Si/(2µ) и количество точек 1,щелчком мыши указываем дугу и начальную точку пересечения оси и дуги, затем щелкаем справа и слева от начальной точки-Stор.
Полученные точки соединяем эвольвентой с помощью кривой Безье. Соединяем эвольвенту е окружностью впадин переходной кривой. Для этого от основания эвольвенты до окружности впадин (rf) проводят радиальный отрезок. Затем скругляют его с окружностью впадин, используя команду «округление» радиусом
|
|
|
ρ=0,25m (чертёжный размер ρч=ρ/µr).
По окончанию построения зуба: удаляем вспомогательные окружности и вспомогательные кривые и точки, при помощи команды «редактор» – «удалить» – «вспомогательные кривые и точки».
Построение фрагмента из 3-х зубьев для шестеренки z1. На чертеже должно быть построено не менее 3-х зубьев (рис. 3.9).

Р и с. 3.9. Фрагмент из 3-х зубьев
Строятся еще два зуба по окружности, оси которых повёрнуты по отношении к оси симметрии первого на углы равные θ=360/z, где z-число зубьев колеса. Для этого выделяем полученный зуб, копируем его вместе с осью симметрии и при помощи команды «редактирование» – «поворот» поворачиваем на рассчитанный угол вокруг точки О1. При построении нужно следить, чтобы зубцы шестерёнки располагались между окружностями вершин и впадин.
Построенный фрагмент из 3-х зубьев шестеренки Z1копируется: «выделить рамкой» – «копировать» – «вставить». Шаблон фрагмента перемещаем так, чтобы средний зуб боковой поверхностью коснулся точки П. Панель «редактирование» – команда «сдвиг указанием». Причём, точка касания должна находиться на делительной окружности зуба. Затем фрагмент нужно повернуть вокруг точки так, чтобы ось симметрии зуба прошла через центр О1. Для этого выполняются команды: панель «редактирование» – кнопка «поворот» – указывается центр вращения П и поворачивается ось симметрии – «Stор».
Аналогично строится зубчатое колесо Z2 нулевого зацепления.
На рис. 1.10 приведён пример нулевого зацепления колёс Z1 и Z2.
Построение рабочих участков зуба (рис. 3.10). Строим рабочие участки профилей зубов, то есть те участки, которые участвуют в зацеплении. Чтобы найти эти участки, нужно на профиле шестерни найти точку, сопрягаемую с крайней точкой головки зуба колеса  и наоборот
и наоборот  . Для этого через точку из центра О2 проводится дуга радиусом О2 д о пересечения с профилем зуба колеса, а через точку из центра О1 дуга радиусом О1 . Для того, чтобы выделить рабочие участки профилей зуба на расстоянии 1,5-2 мм проводятся линии, повторяющие профиль боковых поверхностей зубьев, и заштриховываются полученные области.
. Для этого через точку из центра О2 проводится дуга радиусом О2 д о пересечения с профилем зуба колеса, а через точку из центра О1 дуга радиусом О1 . Для того, чтобы выделить рабочие участки профилей зуба на расстоянии 1,5-2 мм проводятся линии, повторяющие профиль боковых поверхностей зубьев, и заштриховываются полученные области.
|
|
|
Построение станочного зацепления. На рис. 3.11 показано станочное зацепление с реечным ИПК (исходным производящим контуром) шестерни z1.
Имеем следующие данные для проектирования зубчатой рейки: угол наклона прямолинейной части рейки α=20˚; шаг Р=π·m.
Расчет размеров зубьев реечного ИПК проводится последующим параметрам: высота основной части зуба равна  где
где  коэффициент высоты головки (ножки) зуба; радиальный зазор равен с*·m, гдес*=0,25; радиус скругления от наклонной режущей грани к нижней граничной прямой равен
коэффициент высоты головки (ножки) зуба; радиальный зазор равен с*·m, гдес*=0,25; радиус скругления от наклонной режущей грани к нижней граничной прямой равен  , где
, где  .
.

Р и с. 3.10. Нулевое зацепление колес Z1 и Z2
Строится горизонтальная делительная линия инструментальной рейки. Для этого на боковой панели выбираем кнопку «Геометрия» – «горизонтальная линия» – «отрезок» – на панели свойств «осевая». Через точку на этой линии проводится вертикальная ось.
От точки пересечения вправо и влево откладываются отрезки,
равные 2,5Р,которые затем делятся на 5 равных частей. Выше и ниже на расстоянии  и
и  проводят горизонтальные линии. Через точки на делительной линии проводят отрезки, составляющие с вертикалью угол 20°, и формируют режущую кромку зубьев рейки. Изображается фрагмент зубчатой рейки из 3-х зубьев.
проводят горизонтальные линии. Через точки на делительной линии проводят отрезки, составляющие с вертикалью угол 20°, и формируют режущую кромку зубьев рейки. Изображается фрагмент зубчатой рейки из 3-х зубьев.
Фрагмент из 3-х зубьев шестерёнки z1, построенный ранее,
вставляется в ИПК так, чтобы делительная прямая рейки и
делительная окружность шестерёнки касались друг друга.
На рис. 3.11 представлено нарезание отрицательного, нулевого и положительного зубчатых колес.








Р и с. 3.11. Станочное зацепление, где c*m – радиальный зазор;
хm –смещение инструмента; Dym – укорочение зуба, нарезанного со смещением по отношению к нулевому
При назначении коэффициентов смещения для любой передачи должны быть выполнены следующие три условия: отсутствие подрезания зубьев; отсутствие заострения; непрерывность зацепления. Кроме того, выбранные коэффициенты смещения должны обеспечить оптимальные качественные показатели передачи (плавность хода, износостойкость, прочность).
|
|
|
Таблица 3.6
 Кинематические параметры
Кинематические параметры
| № п/п | Угол поворота кривошипа  , градус , градус
| Угловая скорость шатуна  , , 
| Угловое ускорение шатуна 
| Скорость ползуна 
| Ускорение ползуна 
| Скорость точки 
| Ускорение точки 
| ||||

| 
| 
| 
| 
| 
| ||||||
| N | У.П.К. | У.С.Ш. | У.У.Ш. | С.П. | У.П. | VX S2 | VY S2 | V S2 | WX S2 | WY S2 | W S2 |
Динамические реакции
| № п/п | Реакции в кинематических парах, Н | Уравновешивающ. момент  
| |||||||||

| 
| 
| 
| 
| 
| 
| 
| 
| 
| ||
| N | R12X | R12Y | R12 | R03 | R32X | R32Y | R32 | R01X | R01Y | R01 | MUR |
 Окончание табл. 3.6
Окончание табл. 3.6
|
|
|
