 |


Пневматические исполнительные механизмы
|
|
|
|
Пневматические исполнительные механизмы просты, надежны и удобны в эксплуатации. Они взрыво- и пожаробезопасны, поэтому широко применяются в химической промышленности. Пневматические ИМ обладают высоким быстродействием и точностью позиционирования при умеренном перестановочном усилии и небольших габаритах.
Входным сигналом пневматических исполнительных механизмов является давление сжатого воздуха (0,02...0,1 МПа), соответствующее командному сигналу регулятора.
Замечание
Пневматические ИМ можно использовать в комплекте не только с пневматическими регуляторами, но и с регуляторами, формирующими электрический командный сигнал. В последнем случае для преобразования электрического сигнала в пневматический используется электропневмопреобразователь.
В зависимости от вида чувствительного элемента, воспринимающего энергию сжатого воздуха и преобразующего ее в перестановочное усилие выходного элемента, пневматические ИМ делятся на мембранные, поршневые, сильфонные и лопастные.
Наибольшее распространение получили мембранные исполнительные механизмы (МИМ) (рис. 84, а). Прорезиненная мембрана 3 с жестким металлическим центром зажата между двумя фланцами, разделяя пространство МИМ на две полости. Жесткий центр мембраны связан со штоком /. Под мембраной расположена противодействующая пружина 2. Командный сигнал в виде давления сжатого воздуха подается в рабочую полость над мембраной, создавая усилие

пропорциональное командному сигналу (А — эффективная площадь мембраны).
Под действием усилия  мембрана вместе со штоком перемещается вниз. Пружина сжимается, создавая уравновешивающее усилие
мембрана вместе со штоком перемещается вниз. Пружина сжимается, создавая уравновешивающее усилие

пропорциональное перемещению штока ИМ (с — коэффициент жесткости пружины). При равновесии  , т. е.
, т. е. 
|
|
|
откуда следует, что в статическом режиме перемещение штока ИМ пропорционально командному сигналу. Это позволяет использовать величину командного давления  в качестве сигнала, определяющего положение регулирующего органа. Статическая характеристика, связывающая величину командного давления с положением штока во всем диапазоне его перемещения, называется ходовой характеристикой ИМ.
в качестве сигнала, определяющего положение регулирующего органа. Статическая характеристика, связывающая величину командного давления с положением штока во всем диапазоне его перемещения, называется ходовой характеристикой ИМ.
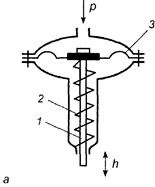
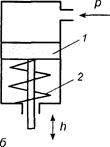


Рис. 84. Исполнительные механизмы:
а — мембранный (/ — шток, 2 — пружина, 3 — мембрана); б — поршневой (/ — поршень, 2 — пружина); в — двухфазный асинхронный двигатель; г — электромагнитный (У — индукционная катушка, 2 — сердечник, 3 — пружина)
Шток исполнительного механизма соединен со штоком регулирующего органа. С увеличением давления воздуха в полости над мембраной 3 шток / вместе с затвором 4 движется вниз и уменьшает проходное сечение клапана, что снижает расход рабочей среды. При уменьшении давления воздуха затвор за счет упругих сил пружины 2 приподнимается, и клапан открывается.
В зависимости от направления движения штока различают мембранные исполнительные механизмы прямого действия (при повышении давления в рабочей полости шток удаляется от плоскости заделки мембраны) и обратного действия (шток приближается).
Для повышения точности и быстродействия пневматических ИУ при работе в тяжелых условиях (большое давление и повышенная вязкость регулируемой среды, большая длина пневматической соединительной линии и др.) их снабжают позиционерами.
Позиционеры служат для усиления мощности пневматического сигнала и обеспечения строгой пропорциональности между перемещением штока ИМ и давлением  , соответствующем командному сигналу регулятора. Это своеобразные усилители с обратной связью по положению штока. Обязательными конструктивными элементами позиционера (рис. 85) являются чувствительный элемент (например, сильфон 1), пружина обратной связи 7, одним концом связанная со штоком ИМ, и золотниковое устройство 3, 4, в которое подается сжатый воздух от внешнего источника питания (например, компрессора). Командный сигнал
, соответствующем командному сигналу регулятора. Это своеобразные усилители с обратной связью по положению штока. Обязательными конструктивными элементами позиционера (рис. 85) являются чувствительный элемент (например, сильфон 1), пружина обратной связи 7, одним концом связанная со штоком ИМ, и золотниковое устройство 3, 4, в которое подается сжатый воздух от внешнего источника питания (например, компрессора). Командный сигнал  поступает в сильфон 1, который преобразует этот сигнал в параметр, удобный для сравнения, — перемещение или усилие. Вид параметра сравнения предопределяет принцип действия позиционера — компенсация перемещений или компенсация сил. Большее распространение получил принцип компенсации сил, который легко реализуется конструктивно и обеспечивает высокую точность. Сравниваются усилие, создаваемое командным сигналом, и усилие, зависящее от текущего положения штока ИМ, создаваемое пружиной обратной связи 7. При рассогласовании этих сил чувствительный элемент управляет работой золотникового устройства, которое изменяет расход сжатого воздуха, направляемого из внешнего источника питания в верхнюю полость МИМ.
поступает в сильфон 1, который преобразует этот сигнал в параметр, удобный для сравнения, — перемещение или усилие. Вид параметра сравнения предопределяет принцип действия позиционера — компенсация перемещений или компенсация сил. Большее распространение получил принцип компенсации сил, который легко реализуется конструктивно и обеспечивает высокую точность. Сравниваются усилие, создаваемое командным сигналом, и усилие, зависящее от текущего положения штока ИМ, создаваемое пружиной обратной связи 7. При рассогласовании этих сил чувствительный элемент управляет работой золотникового устройства, которое изменяет расход сжатого воздуха, направляемого из внешнего источника питания в верхнюю полость МИМ.
|
|
|

Рис. 85. Схема позиционера:
/ — сильфон; 2 — рычаг; 3 ~ золотник; 4 — золотниковая камера; 5 — МИМ; 6 — тяга; 7— пружина обратной связи; 8— РО;  — давление питания,
— давление питания,  — командный сигнал
— командный сигнал
Замечание
В динамическом отношении МИМ в области частот 0...0,3 рад/с рассматривают как последовательное соединение статического звена первого порядка с небольшой постоянной времени (порядка нескольких секунд) и усилительного звена (с зоной гистерезиса 2... 10 %). При длине пневмопровода более 100...150 м МИМ снабжают усилителями мощности и охватывают жесткой отрицательной обратной связью по перемещению РО. При использовании таких позиционеров МИМ рассматривают как статическое звено нулевого порядка (усилительное), не влияющее на динамические характеристики пневматического регулятора и системы управления в целом.
Поршневые ИМ отличаются большим конструктивным разнообразием и применяются в тех случаях, когда требуются большой ход штока и большие перестановочные усилия. В поршневой исполнительный механизм (см. рис. 6.84, 6) управляющий сигнал в виде давления сжатого воздуха подается в цилиндр и перемещает поршень 1, шток которого соединен с РО.
|
|
|
