 |


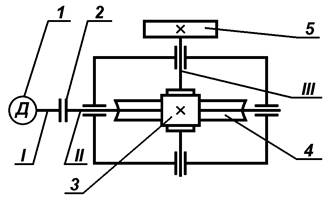
Механизм поворота руки робота с зубчатой передачeй
|
|
|
|
Схема кинематическая
 1. Электродвигатель.
1. Электродвигатель.
2. Соединительная муфта.
3-6. Зубчатые передачи.
7. Платформа для крепления руки
робота.
I- IV. Валы.
Исходные данные
Предлагаемый аналог конструкции [1. кн. 3, с. 208, рис. 5. 2].
Мощность Р, снимаемая с выходного вала IV, Вт.
Скорость n вращения платформы, об/мин.
Срок службы L, часов.
Тип зубчатой передачи 3,4 и 5,6: прямо- или косозубая.
Варианты задания
| N | |||||||||||||||
| P | |||||||||||||||
| n | |||||||||||||||
| L | |||||||||||||||
| 3-4 | Прямозубая | Косозубая | Прямозубая | Косозубая | |||||||||||
| 5-6 | Косозубая | Прямозубая | Косозубая | Прямозубая | |||||||||||
| Производство единичное | Производство серийное |
Задание № 5
МЕХАНИЗМ ПОВОРОТА РУКИ РОБОТА С ЧЕРВЯЧНОЙ ПЕРЕДАЧЕЙ
Схема кинематическая
 1. Электродвигатель.
1. Электродвигатель.
2. Соединительная муфта.
3-4. Червячная передача.
5. Платформа для крепления
руки робота.
I-III. Валы.
Исходные данные
Предлагаемый аналог конструкции [1, кн. 3, с. 208, рис.5. 2].
Мощность Р, снимаемая с выходного вала III, Вт.
Скорость n вращения платформы, об/мин.
Срок службы L, часов.
Варианты задания
| N | |||||||||||||||
| P | |||||||||||||||
| n | |||||||||||||||
| L | |||||||||||||||
| Производство единичное | Производство серийное |
Задание № 6
МЕХАНИЗМ ПОВОРОТА РУКИ РОБОТА С КОНИЧЕСКОЙ ПЕРЕДАЧЕЙ
Схема кинематическая
|
|
|
 1. Электродвигатель.
1. Электродвигатель.
2. Соединительная муфта.
3-4. Коническая передача.
5. Платформа для крепления
руки робота.
I-III. Валы.
Исходные данные
Предлагаемый аналог конструкции [1, кн. 3, с. 208, рис. 5.2].
Мощность Р, снимаемая с выходного вала III, Вт.
Скорость n вращения платформы, об/мин.
Срок службы L, часов.
Варианты задания
| N | |||||||||||||||
| P | |||||||||||||||
| n | |||||||||||||||
| L | |||||||||||||||
| Производство единичное | Производство серийное |
Задание № 7
МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ РУКИ РОБОТА С ЗУБЧАТОЙ ПЕРЕДАЧЕЙ
Схема кинематическая
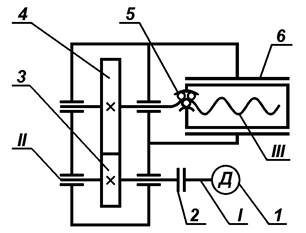
1. Электродвигатель.
2. Соединительная муфта.
3-4. Зубчатая передача.
5. Шариковинтовая передача.
6. Рука робота.
I-II.Валы.
III. Вал-винт.
Исходные данные
Предлагаемый аналог конструкции [l, кн. 3, с. 46, рис. 5.34; 2, с. 46, рис.3. 7].
Мощность Р, снимаемая с выходного вала III, Вт.
Скорость n вращения вала III, об/мин.
Срок службы L, часов.
Тип зубчатой передачи 3,4: прямо- или косозубая.
Варианты задания
| N | |||||||||||||||
| P | |||||||||||||||
| n | |||||||||||||||
| L | |||||||||||||||
| 3-4 | Прямозубая | Косозубая | Прямозубая | Косозубая | |||||||||||
| Производство единичное | Производство серийное |
Задание № 8
ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА С ЧЕРВЯЧНОЙ ПЕРЕДАЧЕЙ
Схема кинематическая
 1. Электродвигатель.
1. Электродвигатель.
2. Соединительная муфта.
3-5. Червячные передачи.
6. Схват робота.
I-IV. Валы.
Исходные данные
Предлагаемый аналог конструкции [З, с. 319, рис. 8.13].
Мощность Р, снимаемая с выходного вала III (IV), Вт.
Скорость n вращения валов III, IV, об/мин.
|
|
|
Срок службы L, часов.
Варианты задания
| N | |||||||||||||||
| P | |||||||||||||||
| n | |||||||||||||||
| L | |||||||||||||||
| Производство единичное | Производство серийное |
СОДЕРЖАНИЕ ИНДИВИДУАЛЬНЫХ РАБОТ
1. Описание работы механизма.
2. Предварительный выбор двигателя.
2.1. Расчет требуемой мощности двигателя.
2.2.Выбор двигателя.
3. Расчет редуктора.
3.1. Кинематический расчет.
3.2. Расчет геометрических размеров.
3.3. Расчет шариковинтовой передачи (для заданий 1,2,3,7)
4.Проверочный расчет требуемой мощности двигателя.
5.Предварительный расчет валов.
6.Расчет момента инерции редуктора.
7.Расчет мертвого ходa.
8.Подбор и расчет подшипников выходного вала.
9.Обоснование применяемых материалов и типа смазки.
Литература.
ПРИЛОЖЕНИЕ
3. Методические указания на выполнение индивидуальной работы
3.1.1. Задание на индивидуальную работу
Задание должно содержать номер, вариант и название, кинематическую схему механизма и исходные данные по своему варианту, например: скорость вращения вала III nIII=550 об/мин.
Описание работы механизма
В расчетно-пояснительной записке необходимо представить исходную кинематическую схему и описать работу механизма в составе промышленного робота, в котором механизм может быть применен. Также нужно указать предполагаемые условия эксплуатации и их влияние на характеристики устройства.
Литература по разделу
Применение промышленных роботов [1—8].
Условия эксплуатации механизмов [10, 13].
|
|
|
