 |


Рисунок 10.3 – Структурная схема Рисунок 10.4 – Структурная схема
|
|
|
|
Рисунок 10. 3 – Структурная схема Рисунок 10. 4 – Структурная схема
многоканальной ИСС сканирующей ИСС
Сканирующие ИС применяют в случае, когда измеряемая величина распределена в пространстве. При исследовании параметрических полей (температур, давлений, механических напряжений и т. д. ) такие ИС дают количественную оценку значений параметров полей в заданных точках. Иногда с помощью сканирующих ИС определяют экстремальные значения параметров исследуемых полей либо находят места равных значений этих параметров. Недостатком этих ИС является относительно малое быстродействие из-за последовательного выполнения операций измерения для всех измеряемых величин.
Мультиплицированные ИС. Эти системы позволяют в течение одного цикла изменения известной величины (развертки) выполнить сравнение со всеми измеряемыми величинами, т. е. определить множество величин без применения коммутирующих узлов. Мультиплицированные системы содержат в каждом измерительном канале элементы Д, С, ВР и общий для всех каналов элемент М (рис. 10. 5). Мультиплицированные ИС называют еще системами с развертывающим уравновешиванием.
Обычно в этих системах измеряемая величина сравнивается с линейно изменяющейся величиной (см. 8. 3). Если зафиксировать момент начала развертки и момент равенства и, то может быть сформирован интервал, пропорциональный значению в момент равенства и. В системе с числом измерительных каналов, большем одного, при необходимости выдачи результата на одно общее устройство регистрации или индикации могут возникнуть трудности в разделении сигналов от элементов сравнения С. В этом случае рабочий диапазон сигнала делят на зоны по числу измеряемых величин, причем каждой измеряемой величине соответствуй своя зона. При этом, кроме момента равенства и, должны фиксироваться моменты достижения сигнала нижней границы каждой зоны.
|
|
|
Если измеряемые величины сравниваются со ступенчато изменяющейся величиной хк (см. 8. 3), то значительно упрощается получение результата измерения в цифровом виде. На рис. 10. 6 показана мультиплицированная ИС, где мера М содержит цифро-аналоговый преобразователь ЦАП, пересчетную схему ПС, генератор импульсов Г, входы останова и запуска которого через логические элементы ИЛИ, реализующие операцию логического сложения, соединены соответственно с выходами элементов сравнения С и выдачи результатов ВР. В момент равенства измеряемой величины одного или нескольких измерительных каналов и известной величины на выходе ЦАП соответствующие элементы сравнения срабатывают и генератор Г останавливается. На выходе ПС окажется значение измеренных величий в коде, подаваемое на элементы ВР (индикаторы, регистраторы и т. п. ). По окончании выдачи результата генератор вновь запускается и работа системы продолжается. При общем для всех измерительных каналов элементе ВР (например, при вводе информации в ЭВМ) одновременно с регистрацией значений измеряемой величины необходимо фиксировать номер датчика или применять иные способы, позволяющие относить полученные результаты измерения к соответствующим датчикам.
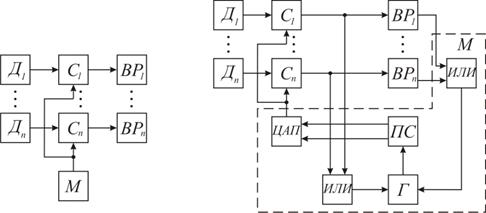
Рисунок 10. 5 – Структурная схема Рисунок 10. 6 – Структурная схема
мультиплицированной ИС мультиплицированной цифровой ИС
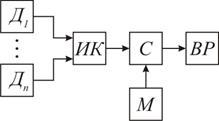
Рисунок 10. 7 – Структурная схема
многоточечной ИС
Мультиплицированные системы имеют меньшее число элементов по сравнению с ИС параллельного действия и при наличии индивидуальных элементов ВР могут обеспечить практически такое же быстродействие. Недостатком мультиплицированных ИС является большое число элементов сравнения, равное числу измеряемых величин. При измерениях сигналов низкого уровня элементы сравнения обычно значительно усложняются.
|
|
|
Многоточечные ИС. Эти системы применяют для исследований сложных объектов с большим числом измеряемых величин. Число измерительных каналов в таких системах может достигать нескольких тысяч. Многократное последовательное использование отдельных узлов измерительного тракта приводит к последовательно-параллельному принципу действия таких систем и к минимальной сложности ИС.
Для согласования действия узлов ИС, работающих параллельно и последовательно во времени, в таких системах применяют измерительные коммутаторы ИК для коммутации аналоговых сигналов датчиков Д (рис. 10. 7). Измерительные коммутаторы должны обладать заданными метрологическими характеристиками (погрешность коэффициента передачи, быстродействие коммутатора и др. ).
Относительная погрешность коэффициента передачи коммутатора определяется по формуле
где - информационные параметры сигналов на выходе и входе коммутатора; - коэффициент передачи коммутатора. Погрешность определяется, главным образом, остаточными параметрами ключевых элементов, используемых в коммутаторе, именно остаточными ЭДС и сопротивлениями замкнутого и разомкнутого ключей. Погрешность зависит также от числа измерительных каналов и от выходного сопротивления датчика и входного сопротивления следующего после коммутатора узла (например, элемента С).
Быстродействие коммутатора обычно определяется допустимым числом переключений в секунду и зависит прежде всего от применяемых элементов.
Наибольшее распространение получили электронные коммутаторы, состоящие из ключей и устройства управления. Коммутаторы могут быть одноступенчатые и многоступенчатые. Число ступеней коммутации зависит от числа датчиков, а также от условий эксплуатации ИС. Достоинством многоточечных ИС является меньшее количество оборудования по сравнению с многоканальными системами, возможность наращивания числа измерительных каналов за счет коммутатора. Недостатком этих систем по сравнению с рассмотренными выше ИС является пониженное быстродействие при большом числе опрашиваемых датчиков и некоторое снижение точности за счет остаточных параметров ключей коммутатора.
|
|
|
