 |


Введение в теорию механизмов и машин.
|
|
|
|
Структура и кинематика рычажных механизмов.
Методические указания
к выполнению курсового проекта по теории механизмов и машин
для студентов заочной формы обучения
Составитель проф. канд. техн. наук Скель В.И.
Москва 2006 г.
Предисловие.
В соответствии с программой курса «Теория механизмов и машин», предусмотренного учебными планами специальностей 190205 и 270113,студенты выполняют курсовой проект, включающий в себя основные разделы дисциплины. Курсовой проект состоит из 3-х листов формата А1: лист №1 – «Структурный и кинематический анализ рычажного механизма»; лист №2 – «Силовой расчет рычажного механизма»; лист №3 – «Зубчатый механизм привода основного механизма». Данные методические указания посвящены выполнению первого листа курсового проекта.
Дисциплина «Теория механизмов и машин» является важнейшей в подготовке инженеров-механиков: знакомит со структурными схемами, функциональными возможностями и особенностями известных механизмов и машин; показывает способы образования новых или модернизации существующих механизмов; дает методы анализа механизмов. Прежде чем создавать новые механизмы или модернизировать существующие, необходимо научится методам их анализа. Изучение методов анализа предшествует знакомству студентов с методами синтеза механизмов. В общем случае различают анализ структурный, кинематический и динамический.
Введение в теорию механизмов и машин.
Теория механизмов и машин (ТММ) – это наука об общих методах проектирования и исследования машин. Основными разделами этой дисциплины являются: 1) структура или строение механизмов; 2) анализ механизмов, то есть определение их свойств по известной схеме; 3) синтез механизмов – проектирование схемы механизма по требуемым свойствам; 4) теория машин-автоматов.
|
|
|
Машиной называется техническое устройство, выполняющее механические движения для преобразования энергии, материалов и информации с целью замены или облегчения физического и умственного труда человека.
Механизмом называется система тел, в которой при заданном движении одного или нескольких твердых тел возникают вполне определенные движения других тел.
Под твердыми телами, входящими в механизм, в ТММ подразумевают как абсолютно твердые, так и гибкие, и деформируемые. Тела, входящие в механизм, называются звеньями, которые бывают неподвижные (стойка) и подвижные (входные или ведущие, выходные или ведомые и промежуточные или соединительные).
Входными называют звенья, которым сообщается движение, преобразуемое механизмом в требуемые движения других звеньев, называемых выходными. Все остальные звенья называются промежуточными.
В 1-ом листе курсового проекта требуется выполнить структурный и кинематический анализ рычажного механизма.
Рычажным называют механизм, звенья которого соединены в кинематическую цепь низшими кинематическими парами.
Кинематической цепью называют систему звеньев, образующих между собой кинематические пары.
Кинематической парой называют подвижное соединение двух соприкасающихся звеньев. Если в узле подвижно соединяется К звеньев, то кинематических пар будет К-1. Кинематические пары бывают плоские и пространственные; низшие и высшие; одно, двух, трех, четырех и пятиподвижные в относительном движении двух звеньев.
Кинематическая пара называется низшей, если контакт звеньев происходит по поверхности, и высшей – в точке или по линии.
В плоских механизмах могут присутствовать кинематические пары только одно- и двухподвижные. К одноподвижным парам, которые называют парами 5-ого класса,
|
|
|
относят вращательные, поступательные (рис. 1) и винтовые. Т.е., для описания движения одного звена относительно другого существует только одна независимая координата: линейное перемещение в поступательной паре; угол поворота во вращательной паре; либо угол поворота, либо линейное перемещение в винтовой (угол поворота винта и его осевое перемещение связаны между собой через шаг винтовой линии или угол ее подъема).

Рис. 1. Одноподвижные кинематические пары 5-ого класса и их условное обозначение на структурно-кинематических схемах:
а)поступательная пара; в)вращательная пара;1,2-номера звеньев, образующих кинематическую пару.
К двухподвижным кинематическим парам, которые называются парами 4-ого класса, относят такие, у которых относительное движение описывается двумя независимыми координатами, например, углом поворота и линейным перемещением. Например, на рис. 2а приведена схема кулачкового механизма. Он состоит из трех подвижных звеньев: 1-кулачка, 2-ролика, 3-коромысла и одного неподвижного звена-стойки 0. При определении кинематической пары как контакта двух звеньев не обращают внимания на другие звенья. На рис. 2а соединение стойки 0 с кулачком 1 образует вращательную пару A; ролика 2 и коромысла 3 вращательную пару С; коромысла 3 и стойки 0 вращательную пару D, а соединение кулачка 1 с роликом 2 –высшую кинематическую пару B четвертого класса. В этой кинематической паре звено 2 относительно звена 1 (или наоборот) может вращаться (поворачиваться на какой-то угол) и поступательно перемещаться (скользить) вдоль общей касательной. То есть это двухподвижная кинематическая пара. В общем случае плоского механизма возможны два варианта таких кинематических пар: контакт двух профилей, например, контакт профилей двух зубьев зубчатого зацепления или профиля кулачка с выпуклым (рис. 2а и 2в) или с плоским (рис. 2с) толкателем.
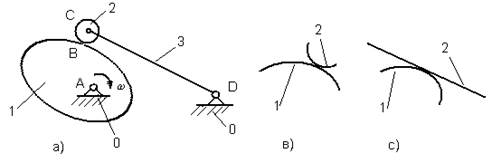
Рис. 2. Плоские двухподвижные кинематические пары 4-ого класса:
а) пример механизма, в) и с) условное обозначение на структурно-кинематических схемах.
|
|
|
