 |


Метод ограничения на частотный показатель колебательности
|
|
|
|
Введение
Каскадное регулирование относится к многоконтурным системам автоматического регулирования. Многоконтурная система – это система автоматического регулирования, в которой после разрыва какой-либо обратной связи остаются другие обратные связи. Для того чтобы рассчитать многоконтурную систему необходимо путем структурных преобразований привести ее схему к одноконтурному виду.
Система называется одноконтурной, если после разрыва обратной связи в ней не остается других обратных связей. Далее необходимо выбрать метод расчета регуляторов. Это может быть метод ограничения на частотный показатель колебательности, метод Зиглера-Никольса, Коэна-Куна, по кривой отклика и многие другие известные методы. Т.к. в данной работе необходимо рассчитать двухконтурную САР, то данную схему придется преобразовывать несколько раз: для нахождения настроек главного регулятора, вспомогательного, уточнения настроек главного регулятора, нахождения прямых и косвенных показателей качества.
Главный и вспомогательный регулятор представлены в дискретной форме, поэтому целесообразно использовать для расчета метод ограничения на частотный показатель колебательности. Однако используя данный метод необходимо помнить что существуют два важных ограничения: необходимо наличие интегральной составляющей, присутствие единичной обратной связи.
Задание
 Рассчитать настройки регуляторов в двухконтурной системе регулирования, используя в качестве главного и вспомогательного регулятора ПИ-регуляторы, сравнить полученные результаты с результатами, полученными при использовании ПИД-регуляторов. Сделать выводы. Расчеты провести при условии, что в системе используются фиксаторы нулевого порядка.
Рассчитать настройки регуляторов в двухконтурной системе регулирования, используя в качестве главного и вспомогательного регулятора ПИ-регуляторы, сравнить полученные результаты с результатами, полученными при использовании ПИД-регуляторов. Сделать выводы. Расчеты провести при условии, что в системе используются фиксаторы нулевого порядка.
|
|
|
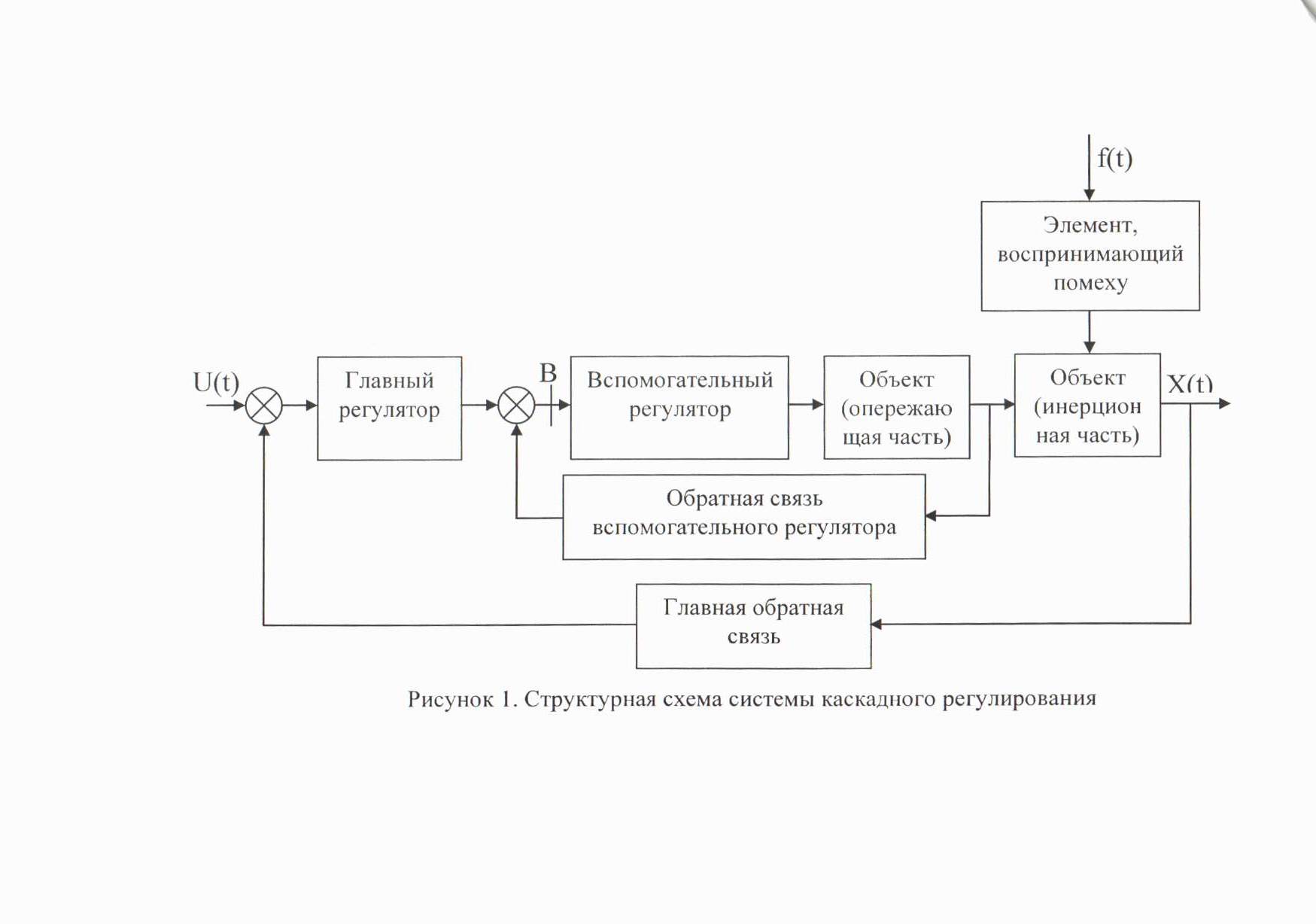
Дана структурная схема двухконтурной САУ:
Рисунок 1 – Структурная схема каскадного регулирования

| τ0, с | Т1,с | Т2,с |  с с
| 
| 
| 
|  с с
|  с с
|  с с
| δ,% | Tp,c |
| 2,8 | 0,4 | 0,2 | 1,2 |
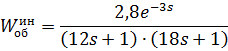
Передаточная функция инерционной части объекта равна:
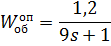
Передаточная функция опережающей части объекта равна:
Передаточная функция вспомогательной обратной связи равна:

Передаточная функция главной обратной связи равна:

Исходные показатели качества:
– перерегулирование: δ=18%;
– время регулирования: t p=40с.
Теоретическая часть
Общие понятия
Передаточная функция– это отношение изображения выходной величины к изображению входной при нулевых начальных условиях или оператора воздействия к собственному оператору системы.
Регулятор – устройство управления, отрабатывающее какой-либо примитивный закон или комбинацию этих законов.
Настройками регулятора являются Кр – коэффициент передачи (пропорциональности) регулятора, Ти – постоянная времени интегрирования, Тд – постоянная времени дифференцирования. Настройки считают оптимальными, если они обеспечивают необходимый запас устойчивости и требуемые показатели качества управления.
Прямые показатели качества определяют свойства переходного процесса по переходной характеристике.
Переходная характеристика – реакция системы на единичное входное воздействие (рисунок 2).

Рисунок 2 – Переходная характеристика и прямые показатели качества
Время регулирования (tp) – отрезок времени, по истечении которого отклонение текущего значения выходной величины от установившегося значения становится меньше заданного значения δ.
Перерегулирование (σ) – максимальное отклонение переходной характеристики от установившегося значения выходной величины, выраженное в долях или процентах этого установившегося значения.
|
|
|
Частота колебаний ω=2π/T; где T- период колебаний (для колебательного типа).
Число колебаний (n) – число колебаний за время регулирования.
Время достижения первого максимума tmax – значение t при hmax.
Время нарастания (tн)– абсцисса первой точки пересечения кривой переходного процесса и линии установившегося значения.
Декремент затухания λ – отношение модулей двух смежных перерегулирований.
Косвенные показатели качества определяют по АЧХ замкнутой системы.
Амплитудно-частотная характеристика (АЧХ) – зависимость изменения амплитуды выходного сигнала в зависимости от изменения частоты входного сигнала при его неизменной амплитуде и фазе (рисунок 3).
Частотный показатель колебательности – это отношение максимального значения АЧХ к ее значению при нулевой частоте:
Резонансная частота (ωрез) – частота, при которой АЧХ принимает максимальное значение.

Рисунок 3 – АЧХ и косвенные показатели качества
Частота среза (ωср) – частота, при которой АЧХ принимает значение, равное единице.
Полоса пропускания (fn) – интервал частоты от нуля до частоты, при которой АЧХ принимает значение, равное 0,707·A(0).
Метод ограничения на частотный показатель колебательности
Частотный показатель колебательности М определяется как отношение максимального значения амплитудно-частотной характеристики замкнутой системы (при резонансной частоте) к её значению при ω=0.
Линии равных значений показателя колебательности представляют собой окружности с центром  и радиусом
и радиусом  .
.
Доказательство
При  ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 /
/  ;
;
 ;
;
 ;
;
 ,
,
что соответствует уравнению
 .
.
Показатель колебательности не должен превышать допустимого значения, то АФЧХ разомкнутой системы не должна заходить в область, ограниченную окружностью, построенной для Мдоп, а только касаться её. На этом построен алгоритм подбора настроек регулятора.
|
|
|
