 |


Заказная спецификация на монтажные изделия и материалы
|
|
|
|
Таблица – Спецификация на монтажные изделия и материалы.
| Наименование | Количество | Цена за единицу, руб. | Общая цена, руб. |
| Кабель КВВГЭ 4х10 | 0,42 км | 243,15 | 102123,00 |
| Кабель КУВ 3х1 | 0,048 км | 236,42 | 11348,16 |
| Кабель МКЭШ 7х0,75 | 0,048 км | 456,00 | 21888,00 |
| Кабель силовой марки КГ 1х10 | 0,16 км | 706,00 | 1129,60 |
| Коробки соединительные КСП-10 | 1шт. | 1250,00 | 1250,00 |
| Коробки протяжные ПК 200x90 | 9шт. | 966,00 | 8694,00 |
| Профиль С - образный перфорированный | 10шт. | 345,86 | 2458,60 |
| Ящик протяжной К654 У2 | 1шт. | 777,62 | 777,62 |
| Кронштейн КН-90 | 110шт. | 12,55 | 1380,50 |
| Кронштейн КН-91 | 50шт. | 9,42 | 471,00 |
| Кронштейн КР-5120 | 5шт. | 13,44 | 67,20 |
| Кронштейн КН-121 | 5шт. | 8,32 | 41,60 |
| ИТОГО: | 151629,28 |
Размещение пультов и оборудования в контрольном помещении
Компоновкой называется общий вид щита и размещенные на нем приборы и средства автоматизации. Компоновка аппаратуры должна обеспечить удобство пользования. Щиты устанавливаются в производственных и специальных щитовых помещениях с температурой окружающего воздуха от -35 до +50 С. При компоновке необходимо обращать внимание на эстетику внешнего вида проектируемого щита.
Средства автоматизации и аппаратуры управления компонуются функциональными группами в порядке хода технологического процесса. Схема коммутации щита представляет собой обратную сторону передней стенки щита с точным расположением на ней аппаратуры с упрощенным изображением проводки. В щиты и пульты разрешается ввод электрического тока напряжением, не превышающем 400В.
При вводе в щиты со средствами автоматизации направленными свыше 250В постоянного и переменного тока рекомендуется тока ведущей части закрывать контуром. Питающие провода, кабели и импульсные трубки рекомендуется подводить непосредственно к вводному выключателю щита.
|
|
|
Индивидуальные цепи питания средств автоматизации схем управления, сигнализации и т.д. рекомендуется подводить от вводного выключателя к соответствующим выключателям и предохранителям. Разводка индивидуальных цепей питания должна выполняться согласно принятым решениям в принципиальной схеме.
РАСЧЕТНАЯ ЧАСТЬ
Идентификация объекта управления
Определение кривой переходного процесса модели объекта регулирования
Исходные данные:
 =0,2;
=0,2;  =1,6;
=1,6;  =2,3;
=2,3;  с;
с;  , M=1,28, закон регулирования ПИ, основной канал регулирования:
, M=1,28, закон регулирования ПИ, основной канал регулирования:  .
.
W(p)= 
(1)
W(p) =, 
(2)

Рисунок – Структурная схема объекта регулирования
Все исходные данные подставляю в формулы (1) и (2) и записываю передаточные функции звеньев.
 =
= 
 =
= 
 =
= 
 =
= 
Чтобы рассчитать передаточную функцию объекта регулирования необходимо выполнить несколько операций:
Вначале найдем передаточную функцию звеньев  и
и  .
.
 *
* 
(3)
 = * =
= * = 
Получаем звено  с передаточной функцией:
с передаточной функцией:

Рисунок – Упрощённая модель объекта регулирования
Далее найдем передаточную функцию звеньев и
 * ,
* ,
(4)
= * = 
Получаем звено  c передаточной функцией:
c передаточной функцией:

Рисунок – Эквивалентная модель объекта регулирования
Потом найдем общую передаточную функцию объекта регулирования с помощью звеньев и 
 * ,
* ,
(5)
 =
=  *
*  =
=
-0.736 s + 2.4533
= -----------------------------------------------------------
11.088 s4 + 54.08 s3 + 64.5667 s2 + 26 s + 3.3333
Получили звено  c передаточной функцией
c передаточной функцией
-0.736 s + 2.4533
------------------------------------------------------------
11.088 s4 + 54.08 s3 + 64.5667 s2 + 26 s + 3.3333
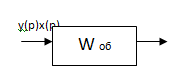
Рисунок – Общая схема объекта регулирования
Определение кривой переходного процесса модели объекта регулирования
Ввожу в программу:
n1=[0.2]; d1=[3.6 1];
n2=[1.6]; d2=[2.8 1];
n3=[2.3]; d3=[1.1 1];
[num1,den1]= series(n1,d1,n2,d2);
[num2,den2]= series(num1,den1,n3,d3);
[num3,den3]= pade(0.6,1);
[num4,den4]= series(num2,den2,num3,den3);
printsys(num4,den4);
step(num4,den4);
gridon
Получим график переходного процесса (рис.)
|
|
|
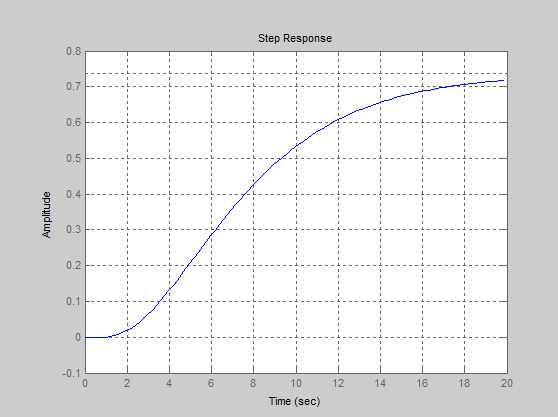
Рисунок - Кривая переходного процесса
На этом графике определяются динамические характеристики объекта:
1) Время запаздывания  .
.
2) Постоянная времени (T).
3) Коэффициент передачи (K).
Идентификация объекта регулирования и определение его динамических параметров
Графически определяем динамические характеристики объекта (рис.)
Рисунок - Динамические характеристики параметры
Динамические параметры объекта управления:
τ= 2,2с
T= 12с
k=0,74
|
|
|
