 |


Системы «Импульсный преобразователь — двигатель постоянного тока». Импульсное управление двигателем постоянного тока.
|
|
|
|
Суть его заключается в том, что частоту вращения двигателя регулируют не величиной постоянно подводимого напряжения, а длительностью питания двигателя номинальным напряжением. Одна из возможных схем импульсного управления приведена на рис. 2.7,а. Там же (рис. 2.7,б) показаны графики скорости при различных t.
В период, когда электронный ключ открыт, питающее напряжение полностью подается на двигатель, ток якоря увеличивается, двигатель развивает положительный момент и частота вращения возрастает; когда электронный ключ закрыт, ток под действием запаса электромагнитной энергии продолжает протекать в том же направлении но через обратный диод. При этом он уменьшается, момент двигателя уменьшается, угловая скорость вращения падает.
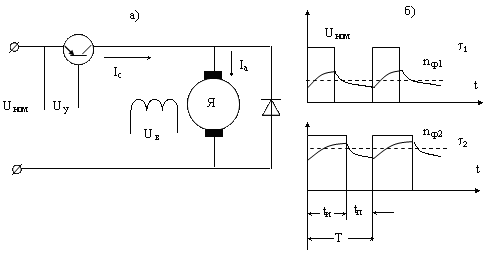
Рис. 2.7. Схема импульсного управления (а), графики скорости вращения (б) при разных τ. (τ2 > τ1)
Система «Тиристорный преобразователь - двигатель переменного тока». Тиристорные регуляторы напряжения.

Скорость асинхронного двигателя можно регулировать изменением напряжения, подводимого к статору, при этом частота напряжения на двигателе не изменяется и равна стандартной частоте сети 50 Гц.
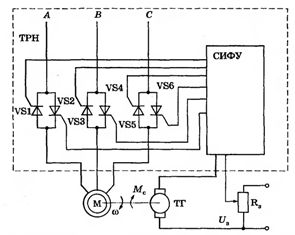
Для регулирования напряжения на статоре АД в настоящее время наибольшее распространение получили тиристорные регуляторы напряжения (ТРН), которые обладают большим быстродействием, высоким КПД, небольшой стоимостью, простотой обслуживания. Трехфазная схема ТРН для регулирования напряжения на статоре АД, построенная на основе однофазных схем ТРН представлена на рис. 6.1, а. Она состоит из шести тиристоров VS1...VS6. В каждую фазу трехфазного ТРН включаются два тиристора по встречно-параллельной схеме, которая обеспечивает протекание тока в нагрузке в оба полупериода напряжения сети U1. Тиристоры получают импульсы управления Ua от системы импульсно-фазового управления (СИФУ), которая обеспечивает их сдвиг на угол управления а в функции внешнего сигнала Uу Изменяя угол управления а от 0 до 180°, можно регулировать напряжение на статоре от полного напряжения сети U1 до нуля.
|
|
|
Регулирование напряжения на статоре не приводит к изменению скорости холостого хода w0 и не влияет на критическое скольжение SК, но существенно изменяет значение критического (максимального) момента Мк. Это связано с тем, что критический момент асинхронного электродвигателя пропорционален квадрату напряжения: Мк ~ U^2.
Принципы построения систем подчинённого управления. Функциональная схема. Структурная схема.





Варианты оптимизации контура регулирования тока в системах подчинённого управления.
Последовательная оптимизация контуров управления

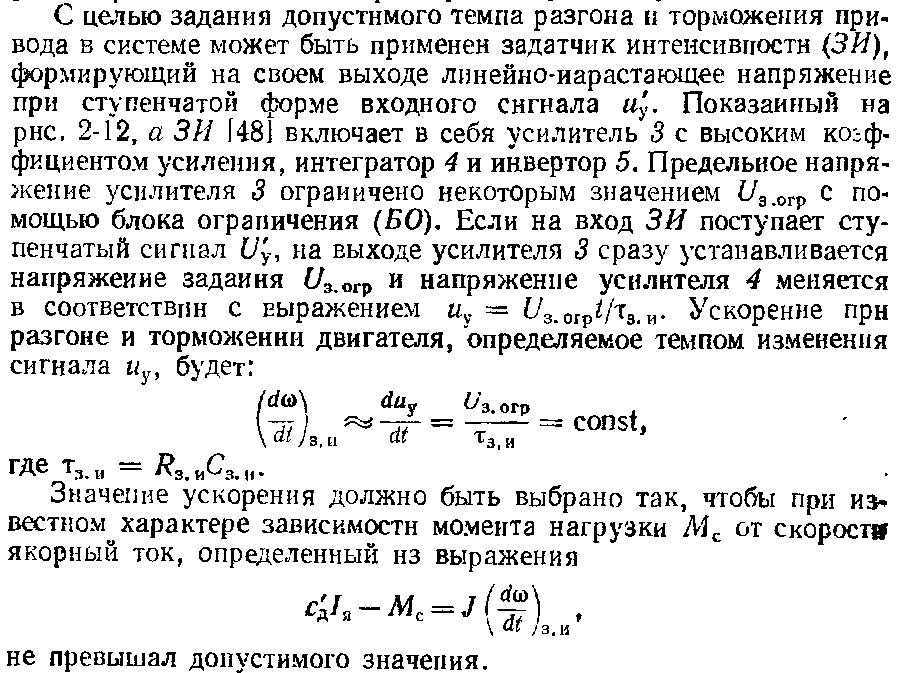
Ограничение координат в системах подчинённого управления. Задатчик интенсивности.

Оптимизация контура регулирования скорости в системах подчинённого управления.



Статическая система регулирования скорости.
Статическими называются САР, у которых в установившемся режиме (статическом стационарном) присутствует ошибка регулирования, зависящая от нагрузки. В таких системах все элементы контура регулирования являются статическими элементами.

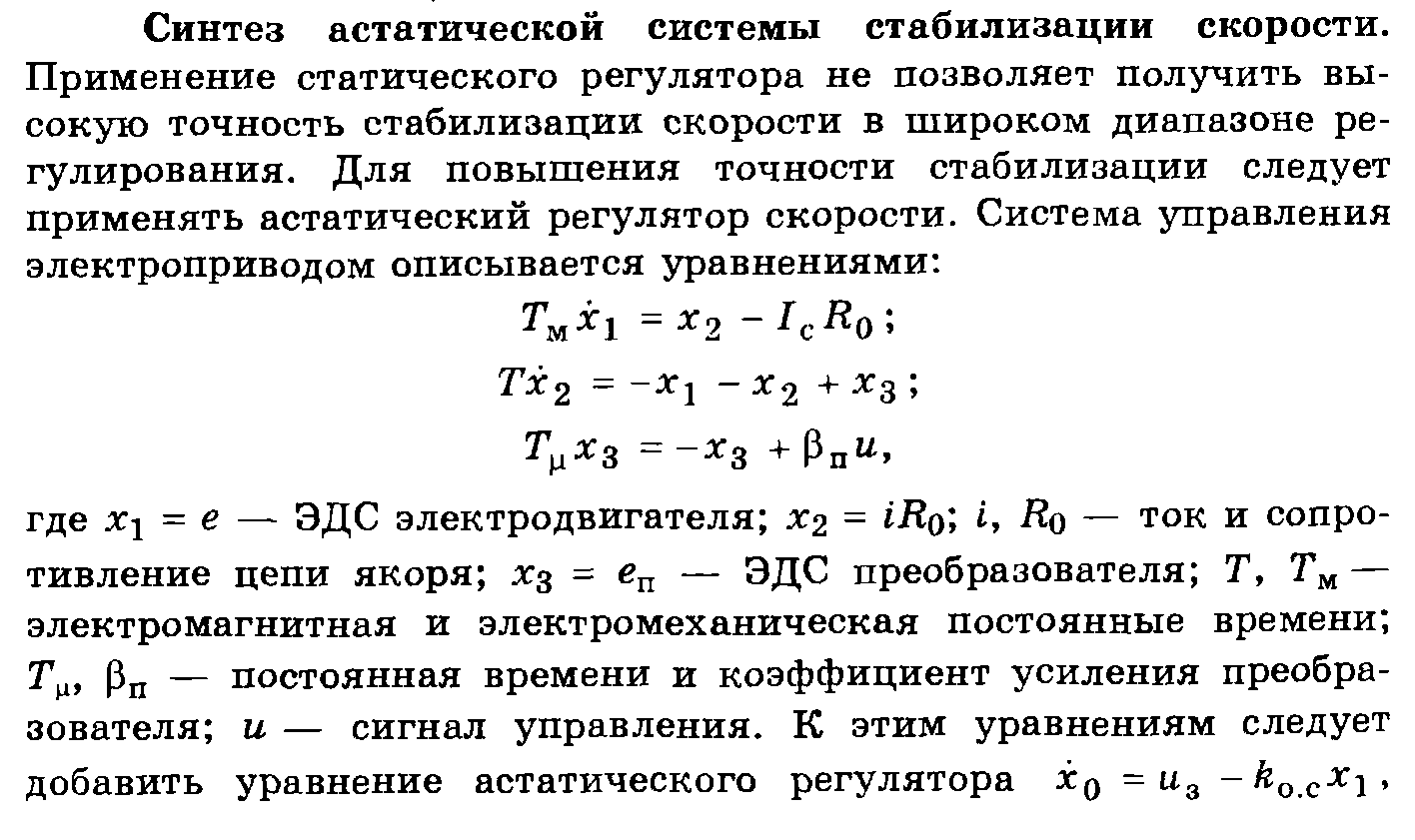
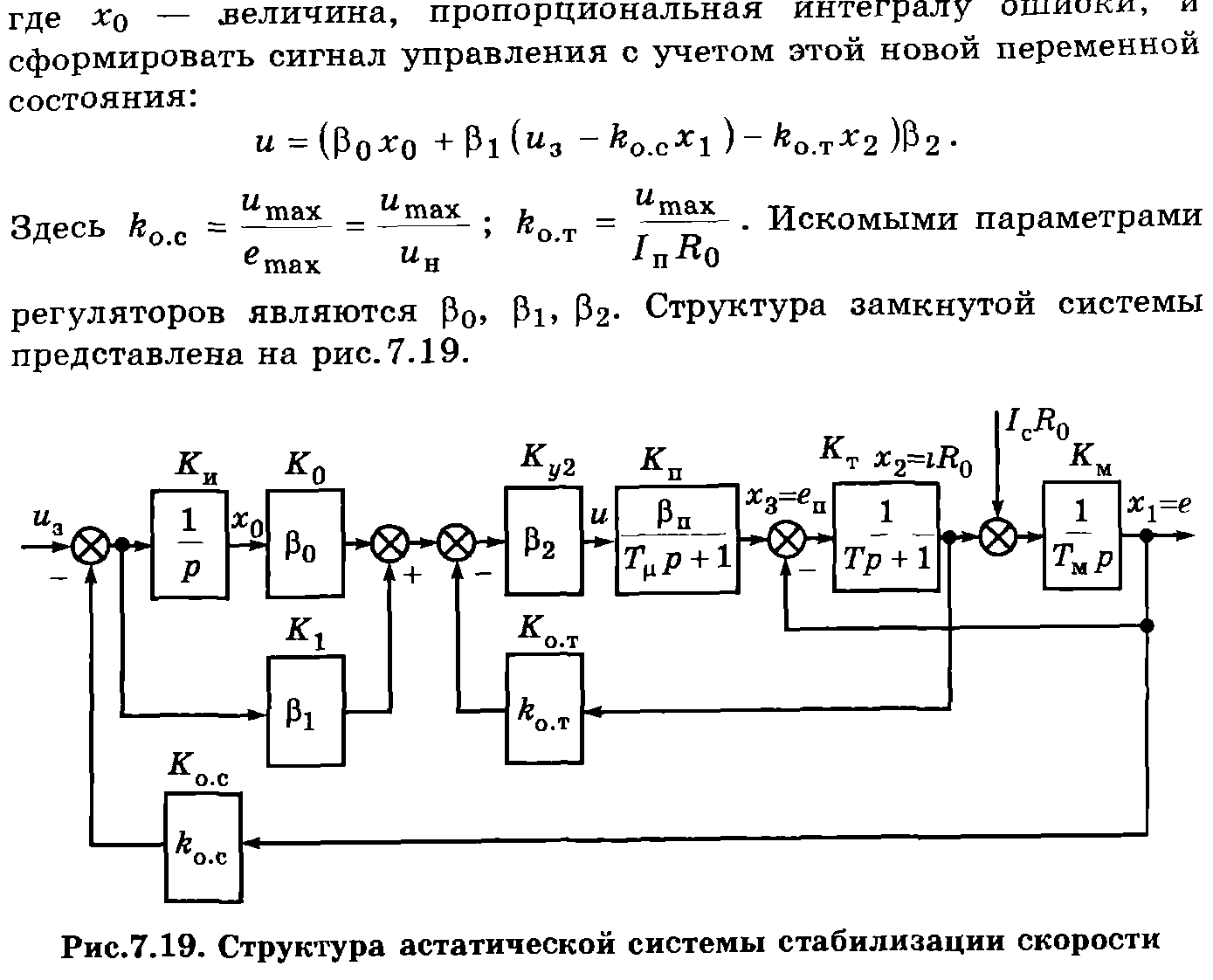
Астатическая система регулирования скорости подчинённого управления. Варианты оптимизации контура регулирования скорости.
Астатические системы автоматического регулирования от статических систем отличаются отсутствием в статическом стационарном режиме статической ошибки регулирования зависящей от величины нагрузки. Ошибка регулирования в астатических системах является постоянной по величине и определяется лишь порогом чувствительности контура регулирования.
|
|
|
|
|
|
