 |


Электрическая схема устройства управления
|
|
|
|
Для задания необходимой последовательности команд используем контроллер Arduino (рис.3) с записанной в его память соответствующей программой (КОДОМ). Имеем 8 датчиков в виде конечных микропереключателей, расположение которых определяет положение захвата крана-штабелера. Сигналы с датчиков поступают на вход контроллера. С выхода контроллера поступает 6 команд на три электродвигателя, работающих в реверсивном режиме.

Рис.3. Плата Arduino

Рис.4. Подключение платы Arduino (вариант 1)
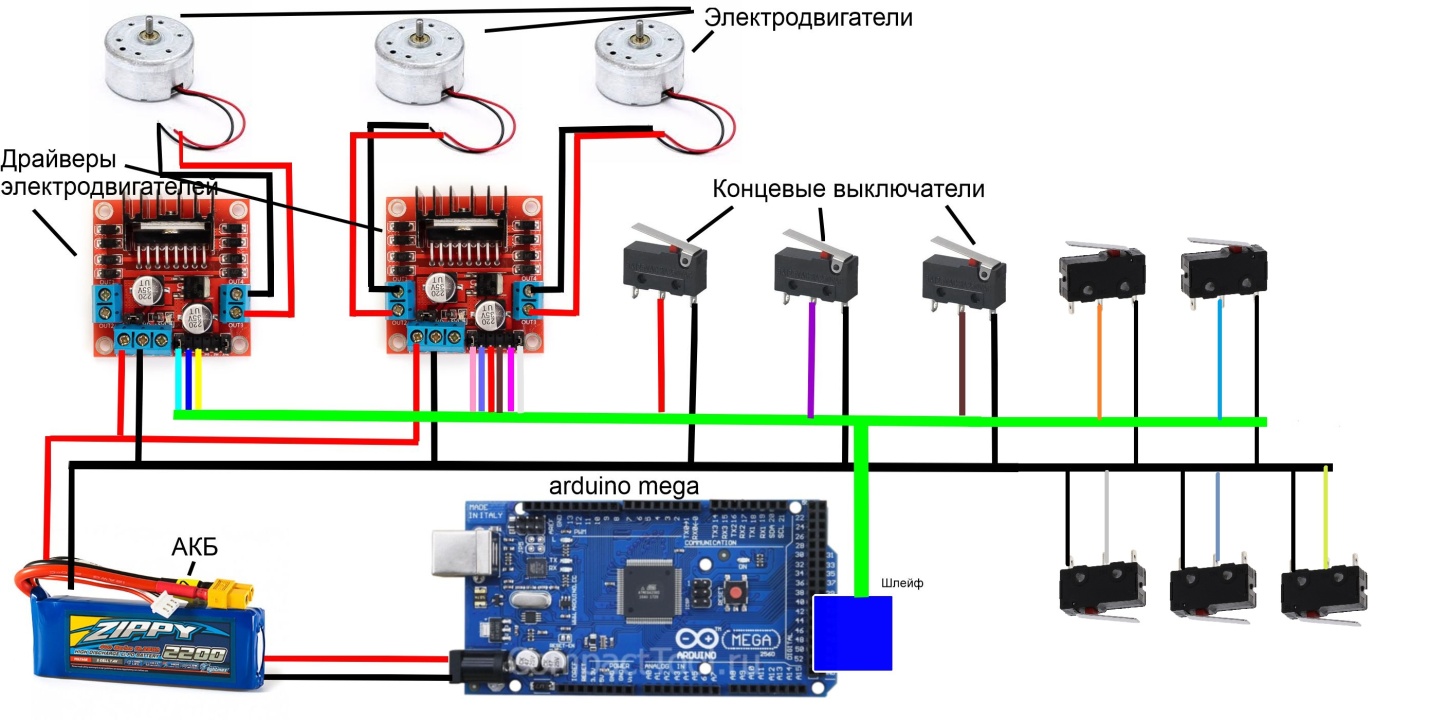
Рис.4. Подключение платы Arduino (вариант 2)
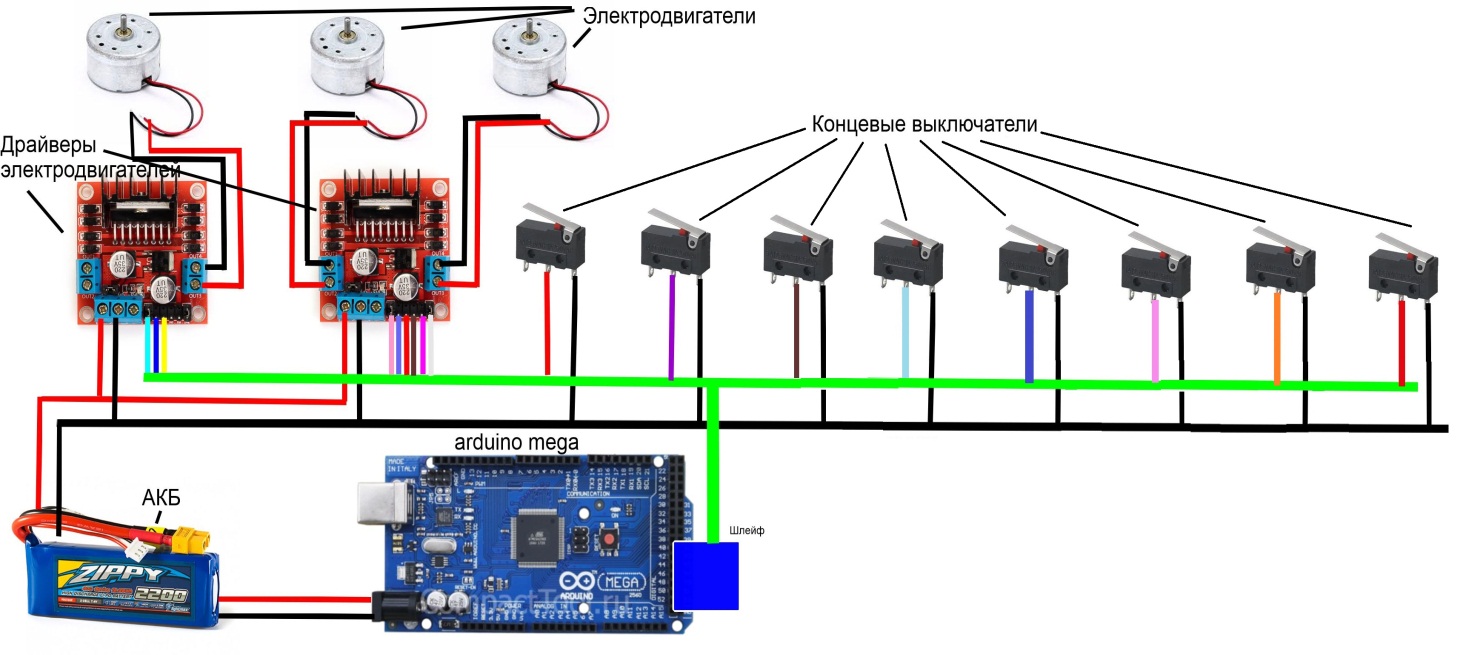
Рис.4. Подключение платы Arduino (вариант 3)
В процессе управления необходимо переместить захват с грузом из позиции калибровки в нужную ячейку стеллажа или взять груз из заданной ячейки склада и переместить в нулевую позицию. Для этого используется определенная последовательность команд.
Внутри корпуса блока управления установлены: плата Arduino mega, которая принимает данные с концевых выключателей и управляет процессом, две платы драйверов двигателей L298N для управления 3-мя двигателями и плата индикации для выбора режима работы стенда. Общий вид блока управления и расположение плат приведено на рисунке 4 а, б.


а б
Рис.5. Общий вид блока управления (а) и расположение плат (б)
Пины для подключения указаны в примере.
Пример
Опишем алгоритм, для управления направлением и скоростью вращения двигателями осям X, Y, Z, а также определение срабатывания концевых выключателей в соответствии с положениями захвата. После опишем функцию калибровки. Функция калибровки перемещает захват в исходную позицию.
|
|
|
int motor_x1 = 2;//Подключение мотора, управляющего осью Х, 2 пин для //управления скоростью ШИМ, остальные 2 используются для выбора //направления вращения, нужно подавать разноименные сигналы
int motor_x2 = 38;
int motor_x3 = 40;
int motor_y1 = 4; //Подключение мотора, управляющего осью Y
int motor_y2 = 46;
int motor_y3 = 48;
int motor_z1 = 3; //Подключение мотора, управляющего осью Z
int motor_z2 = 42;
int motor_z3 = 44;
int conx1 = 22;// Подключение концевых выключателей для оси X
int conx2 = 24;
int conx3 = 26;
int cony1 = 34; // Подключение концевых выключателей для оси Y
int cony2 = 36;
int conz1 = 28; // Подключение концевых выключателей для оси Z
int conz2 = 30;
int conz3 = 32;
void setup()
{
//Объявляем указанные выше порты, на моторах OUTPUT потому что мы //будем посылать на них сигнал, а у кнопок INPUT, потому что мы //принимаем данные
pinMode (motor_x1, OUTPUT);
pinMode (motor_x2, OUTPUT);
pinMode (motor_x3, OUTPUT);
pinMode (motor_y1, OUTPUT);
pinMode (motor_y2, OUTPUT);
pinMode (motor_y3, OUTPUT);
pinMode (motor_z1, OUTPUT);
pinMode (motor_z2, OUTPUT);
pinMode (motor_z3, OUTPUT);
pinMode(conx1, INPUT_PULLUP);
pinMode(conx2, INPUT_PULLUP);
pinMode(conx3, INPUT_PULLUP);
pinMode(cony1, INPUT_PULLUP);
pinMode(cony2, INPUT_PULLUP);
pinMode(conz1, INPUT_PULLUP);
pinMode(conz2, INPUT_PULLUP);
pinMode(conz3, INPUT_PULLUP);
pinMode(but1, INPUT_PULLUP);
pinMode(but2, INPUT_PULLUP);
pinMode(but3, INPUT_PULLUP);
collibration(); //Функция калибровки, Указана ниже
}
void loop()
{
}
void motorx(int speedx, bool rotx)//Готовая функция для мотора Х, которая //принимает направление и скорость вращения
{
if (rotx == 1)
{
digitalWrite(motor_x2, 0);
digitalWrite(motor_x3, 1);
}
else
{
digitalWrite(motor_x2, 1);
digitalWrite(motor_x3, 0);
}
analogWrite(motor_x1, speedx);
}
void motory(int speedy, bool roty)
{
if (roty == 1)
{
digitalWrite(motor_y2, 1);
digitalWrite(motor_y3, 0);
}
else
{
digitalWrite(motor_y2, 0);
digitalWrite(motor_y3, 1);
}
analogWrite(motor_y1, speedy);
}
void motorz(int speedz, bool rotz)
{
if (rotz == 1)
{
digitalWrite(motor_z2, 1);
digitalWrite(motor_z3, 0);
}
else
{
digitalWrite(motor_z2, 0);
digitalWrite(motor_z3, 1);
}
analogWrite(motor_z1, speedz);
}
void collibration()//Функция калибровки, которая приводит захват в 0-ю точку
{
while (!digitalRead(cony2) == 0)
motory(250,1);
motory(0,1);
while (!digitalRead(conz1) == 0)
motorz(250,1);
motorz(0,1);
while (!digitalRead(conx3) == 0)
motorx(250,1);
delay(600);
|
|
|
motorx(0,1);
}
Для работы стенда в демонстрационном режиме с индикацией и кнопками выбора ячеек необходимо загрузить библиотеку, которая должна быть расположена в определенной папке на том же носителе, где и основная программа (коды).
Для запуска демонстрационной программы управления необходимо:
-запустить программу «Ардуино»;
-выбрать Скетч;
-подключить библиотеку (в диалоговом режиме);
-добавить ZIP библиотеки, для этого выбираем папку с флешки и нажимаем «OPEN»
Задание
Переместить захват крана-штабелера из позиции калибровки в нужную позицию используя логические выражения, которые мы можем воплотить на микроконтроллере и остальной периферии.
| Вариант | Задание | Примечания |
| 1 | Переложить с 1 на 4 и обратно | |
| 2 | Переложить с 5 на 2, а после поставить в 0 | |
| 3 | Взять из 0 и положить в 2, после переложить в 3 и вернуть в 0 | |
| 4 | Переложить с 4 на 6 и обратно | |
| 5 | Переложить с 5 на 4, а после на 1 | |
| 6 | Переложить с 6 на 3 | |
| 7 | Взять из 0, положить в 1,2,3,4 ячейки по очереди | |
| 8 | Переложить с 3 на 4, а затем на 1 | |
| 9 | Переложить с 1 на 3 и обратно | |
| 10 | Переложить с 2 на 5, а затем на 4 |
Авторы:
Виноградов Михаил Владимирович
Ненашев Артем Алексеевич
|
|
|
