 |


Представление работы к защите и оформление ее результатов
|
|
|
|
Защита работы проводится перед комиссией, состав которой утверждается кафедрой. Перед защитой к указанному в задании сроку студент представляет контрольно-курсовую работу на заключение руководителю. Заключение руководителя должно быть подписано и указана дата возврата работы студенту. После этого работа направляется на рецензию. Рецензент по представленным студентам материалам проставляет оценку по графической части, расчетно-пояснительной записке, соответствию требованиям ГОСТов, обоснованности разработки и общую оценку.
При подготовке к защите контрольно-курсовой работы студент составляет доклад, рассчитанный на 5 - 10 минут. В докладе должна быть сформулирована поставленная задача, изложена пути и методы ее решения, полученные результаты. По результатам доклада, ответам на вопросы и представленной работе проставляются соответствующие баллы: за рецензию до 5-ти баллов; за доклад – до 20-ти, за защиту – до 35-ти; за контрольно-курсовую работу –до 40-ка. Все оценки за контрольно-курсовую работу включая итоговую заносятся в ведомость, а итоговая кроме этого проставляется в зачетную книжку студента.
После каждого дня защиты листы графического материала и расчетно-пояснительные записки защищенных контрольно-курсовых работ сдаются председателем комиссии на хранение ответственному на кафедре лаборанту.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ
КОНТРОЛЬНО-КУРСОВОЙ РАБОТЫ
Анализ исходного задания. Формализация поставленной задачи.
Исходные данные для выполнения контрольно-курсовой работы включают в себя принципиальную электрическую схему исходной САУ, таблицу параметров, входных сигналов, возмущений и требуемых показателей качества. Очень важно определить класс САУ, к которой относится исходная система, для чего следует, исходя из уяснения физической сущности процессов, протекающих в системе, выяснить принцип организации управления, характер основных воздействий на систему, возможные режимы работы. На этом этапе одним из основополагающих моментов является определения класса рассматриваемой системы: статическая или астатическая.
|
|
|
Пример.
Пусть требуется перейти от содержательного описания принципиальной электрической схемы САР соотношения скоростей приводов главного движения и подачи металлорежущего станка (рис.1).
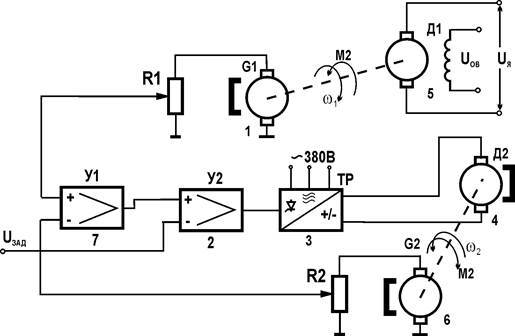
Рис.1. Принципиальная электрическая схема САР соотношения скоростей приводов главного движения и подачи металлорежущего станка
Принципиальная схема такой САР содержит следующие функциональные элементы (рис. 2):
- собственно объект управления - двигатель постоянного тока (Д2), управляемый по цепи якоря;
усилительно-преобразовательные элементы - электронный усилитель (У2) и тиристорный регулятор (ТР);
- суммирующий элемент: электронный усилитель (У1);
- измерительные устройства - тахогенераторы (G1 с R1 и G2 с R2);
- задающее (входное) воздействие – скорость вращения ПГД w1;
- входное воздействие Uзад в данном случае определяет требуемое значение разности скоростей приводов главного движения и подачи металлорежущего станка (в дальнейшем прием Uзад=0 –это не нарушит общности рассуждений)
Очевидно, цель системы - поддерживать с определенным качеством заданное технологическим регламентом соотношение скоростей вращения ПГД и привода подачи, например в режиме обработки фасонных поверхностей. В течение процесса управления задающий (управляющий) сигнал на входе системы w1- зависит от нагрузки на валу двигателя ПГД Д1, то есть не является величиной неизменной. Величины моментов сопротивления на валах двигателей зависят от режимов обработки и параметров заготовки. Они представляют для системы регулирования возмущающие воздействия. Для упрощения дальнейших выкладок целесообразно предположить, что возмущающее воздействие действует только на двигатель подачи Д2, так как он отслеживает изменение скорости ПГД.
|
|
|

Рис.2. Функциональная схема САР соотношения скоростей приводов главного движения и подачи металлорежущего станка
Предполагается, что параметры функциональных элементов системы постоянны во времени. На основании функциональной схемы и типа входного сигнала можно сделать вывод, что система управления соотношением скоростей приводов металлорежущего станка организована по замкнутому циклу на основе отрицательной обратной связи, находится в классе обычных систем и относится к системам автоматического регулирования и является статической. Стационарность свойств системы во времени и ее одномерность показывают, что ее расчет может быть проведен методами классической теории управления, которые для простых одномерных стационарных систем доведены до инженерных методик.
Реальная система всегда содержит нелинейности. Например, привод не всегда может обладать теми динамическими возможностями, которыми он должен был бы обладать по линейной теории, в виду проявления ограничений величины подводимых энергоносителей или его мощности, то есть возникают нелинейности типа насыщение. Аналогичный эффект можно наблюдать и на электронных усилителях, так как их линейная зона превышает уровень полезного сигнала, как правило, всего в 1,5 - 2 раза. При малых входных сигналах, когда их уровень лежит в пределах зоны нечувствительности усилителя или тахогенератора, линейная модель также не адекватна реальной системе. Очевидно, в этих условиях правильным было бы выбрать нелинейную модель, как наиболее полно отражающую процессы, протекающие в системе. Однако это приведет к резкому усложнению расчетов и потере некоторой наглядности необходимой, в частности для учебных целей.
В большинстве практически случаев, благодаря правильному выбору параметров элементов систем, влияние нелинейностей несущественно и основные свойства реальной системы можно изучить и предсказать, пользуясь ее линейной моделью. Поэтому, учитывая, что она описывает основной (наиболее вероятный) режим работы системы, ее можно принять как основную для синтеза систем слежения и стабилизации в окрестности рабочего режима. После чего, когда линейная САР будет разработана, если необходимо исследовать ее поведение в режимах малых и больших входных сигналов.
|
|
|
Очень важно исследовать возможность описания системы линейной моделью, что позволяет существенно упростить расчеты. Для этого следует обратиться, к математическому описанию функциональных элементов системы в различных режимах ее работы. Очевидно, что рассматриваемую систему (рис.1) в режиме нормальной эксплуатации, когда система отслеживает изменение скорости ПГД, заданной технологическим регламентом, модель системы можно считать линейной, так как все функциональные элементы допускают линеаризацию в отклонениях. Учитывая, что математическим аппаратом классической теории управления являются операционное исчисление и преобразование Фурье, структурную схему системы целесообразно представить в передаточных функциях (рис. 3).
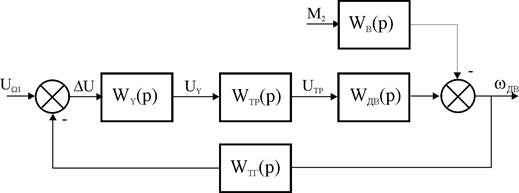
Рис. 3. Структурная схема САР соотношения скоростей приводов главного движения и подачи металлорежущего станка
Формализация системы в виде структурной схемы позволяет проанализировать прохождение сигнала через элементы схемы и допускает хорошую физическую интерпретацию процессов, протекающих в системе управления.
Таким образом, в контрольно-курсовых работах и в рассматриваемом примере, в частности, за основную принимается линейная модель. Описание функциональных элементов систем широко представлено в литературе [1 - 4]. Структурная схема САР соотношения скоростей приводов главного движения и подачи металлорежущего станка, учитывающая вид передаточных функций линейных элементов, приведена на рис. 4.
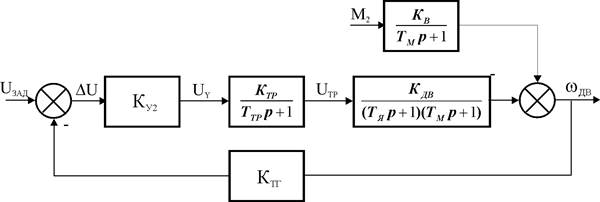
Рис. 4. Уточненная структурная схема САР соотношения скоростей приводов главного движения и подачи металлорежущего станка
|
|
|
На основании анализа исходных данных, если численные значения постоянных времени элементов отличающиеся друг от друга (более чем на два порядка), может быть понижен порядок исходной системы без ухудшения ее динамических характеристик. В рассмотренном примере такими постоянными могут быть, например ТТР тиристорного регулятора или ТЯ двигателя.
В заключение этого этапа часто бывает удобным привести структурную схему системы к схеме с единичной обратной связью, так как методики инженерных расчетов применяются именно к таким системам. Поскольку обратная связь жесткая, то перенесение звена из обратной связи в прямую цепь соответствует лишь изменению масштаба представления выходной величины. Ей в данном случае будет являться измеряемая с помощью датчика выходная переменная системы – скорость привода подач.
В рассматриваемом примере САР соотношения скоростей приводов главного движения и подачи металлорежущего станка после переноса тахогенератора в прямую цепь выходной переменной системы является уже напряжение с его выхода, и структурная схема принимает вид, показанный на рис. 5.

Рис. 5. Преобразованная структурная схема САР соотношения скоростей приводов главного движения и подачи металлорежущего станка
Интересно отметить, что если в САР, представленная на рис. 1, датчики скорости – тахогенераторы заменить на датчики угла поворота, то она переходит в класс астатических систем. Такая система реализуется в станках токарной группы с системами ЧПУ, например в режиме резьбонарезания или в режиме ручного управления от маховичка. В этом случае структурная схема системы может быть представлена в следующем виде (см. рис. 6).
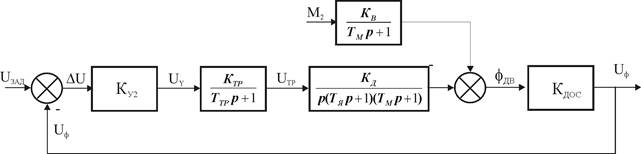
Рис. 6. Структурная схема САР слежения за соотношением углов поворота приводов главного движения и подачи металлорежущего станка
В результате формализации задачи в пояснительной записке на основе содержательного анализа исходной схемы должны быть приведены аргументированная классификация системы, обоснован выбор типа математической модели, описаниеее функциональных элементов и, если это возможно, ее упрощение.
|
|
|
