 |


Анализ качества регулирования САР.
|
|
|
|
Пользуясь ЛЧХ, по номограмме (рис. 11) может быть определена вещественная частотная характеристика замкнутой системы.

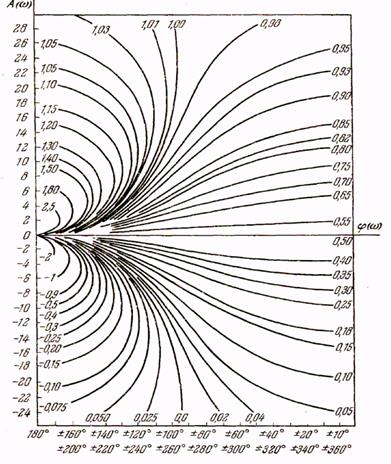
Рис. 11. Номограмма для определения вещественной частотной характеристики замкнутой системы
Известны и алгебраические приемы, позволяющие сравнительно просто с достаточной точностью построить вещественную частотную характеристику (ВЧХ) замкнутой системы [5]. Для этого используется передаточная функция замкнутой системы, для статической системы с передаточной функцией (13)
 , (14)
, (14)
где  – коэффициент усиления разомкнутой системы.
– коэффициент усиления разомкнутой системы.
Ее частотная характеристика имеет следующий вид:
 . (15)
. (15)
После соответствующих преобразований

и, выделив действительную часть, получим выражение для вещественной частотной характеристики (ВЧХ) замкнутой системы
 (16)
(16)
Она позволяет оценить качество системы по характеристикам переходного процесса. Для рассматриваемого примера статической системы с передаточной функцией (13) и Кр =12 ВЧХ представлена на рис. 12.
|
|

Рис. 12. Вещественная частотная характеристика исходной замкнутой схемы
С ее помощью осуществляется оценка показателей качества переходного процесса: перерегулирования и длительности переходного процесса
 ;
;  , (17)
, (17)
где Р 0 – значение ВЧХ при w=0; Р max, wC – максимальная высота и частота основания низкочастотной трапеции ВЧХ. В данном случае Р max=1.22, wC=28с-1.
Таким образом, для рассматриваемого примера перерегулирование s=40% и длительности переходного процесса 0,12<tпп<0.45. На этапе анализа исходной САР такой точности оценки ее качества, как правило, бывает достаточно.
В тех случаях когда порядок системы не превышает 3-х и передаточная функция не имеет нулей, то достаточно эффективным средством оценки устойчивости и качества САР являются диаграммы Вышнеградского, которые позволяют с наименьшими затратами провести анализ таких систем.
|
|
|
Для астатических систем с типовым наклоном логарифмической амплитудно-частотной характеристики (ЛАЧХ) эффективным является применение номограмм качества, которые широко используются в инженерной практике.
Оценка точности САР от суммарного действия управляющих и возмущающих воздействий в установившемся режиме широко освещена в литературе [1-5].
Величина ошибок в установившемся режиме зависит от характера входных воздействий, порядка астатизма системы, ее коэффициента усиления и наибольшей постоянной времени. Таким образом, качество установившегося режима работы определяется параметрами низкочастотной части ЛАЧХ. Для того чтобы максимальные ошибки, возникающие в синтезируемой системе, не превышали заданных допустимых значений, необходимо правильно выбирать параметры низкочастотной части желаемой ЛАЧХ. В общем случае структурная схема любой САР, на которую действует входное воздействие u (t) и возмущение f (t), может быть представлена в виде схемы, показанной на рис. 13.
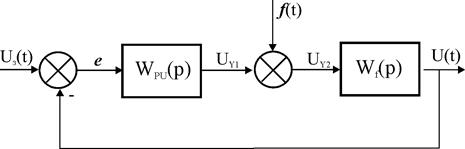
Рис. 13. Структурная схема системы автоматического регулирования
В этом случае изображение сигнала ошибки будет иметь следующий вид:
 , (18)
, (18)
где  - передаточная функция разомкнутой системы по задающему воздействию u (t);
- передаточная функция разомкнутой системы по задающему воздействию u (t);  – передаточная функция разомкнутой системы по возмущающему воздействию f (t).
– передаточная функция разомкнутой системы по возмущающему воздействию f (t).
В статическом режиме все воздействия постоянны во времени. Полагая  и
и  , получаем выражение установившейся ошибки
, получаем выражение установившейся ошибки
 . (19)
. (19)
Если передаточная функция W PU (p) содержит v интеграторов, а W F (p) имеет k интеграторов, то система обладает астатизмом v -го порядка по задающему воздействию и (v-k)-го порядка по возмущающему воздействию.
|
|
|
При v = k статическая ошибка равна нулю, то есть система является астатической по возмущающему и задающему воздействиям. Когда хотя бы одно из воздействий меняется с постоянной скоростью или постоянным ускорением, то возникает динамический установившийся режим.
Например, при  и установившаяся динамическая ошибка
и установившаяся динамическая ошибка
 . (20)
. (20)
Если  и , то
и , то
 . (21)
. (21)
При гармоническом входном воздействии (например, качке) возникает вынужденный установившийся гармонический режим работы. В этом режиме при  и ошибка будет иметь вид:
и ошибка будет иметь вид:

 ;
;  , (22)
, (22)
где e max - амплитудное значение ошибки; j- фаза сигнала ошибки.
При оформлении данного этапа контрольно-курсовой работы необходимо:
–дать аргументированное обоснование выбора метода анализа;
–привести необходимые выкладки при исследовании устойчивости и оценке точности САР в установившемся режиме;
–произвести сравнительную оценку качества исходной САР с требуемыми показателями.
Таблица 2.
Ошибки в типовых режимах работы САР
| Вид входного сигнала | Тип системы | ||
| Статическая | Астатическая 1-го порядка | Астатическая 2го порядка | |
|
| 
| 
| |
|
| µ | 
| |
|
| µ | µ | 
|
|
| 
| 
| 
|
Список литературы по курсу
6.1. Основная литература
1. Теория автоматического управления /Под общ.ред. А.В.Бессекерского. - М.: Высшая школа, 1975. -678 с.
2. Теория автоматического управления /Под общ.ред. А.В.Нетушела. - М.: Высшая школа, 1968. -424 с.
3. Тихонов А.Н., Самарский А.А. Уравнения математической физики. - М.: Наука. 1972. -736 с.
4. Фельдбаум А.А., Бутковский А.Г. Методы теории автоматического управления. - М.: Наука. 1971. -744 с.
5. Шарин Ю.С., Якимович Б,А, Тулаев Ю,И. Проектирование элементов и систем автоматизированного производства. –М.:Машиностроение.-1995.-112с.:ил.
12.2. Дополнительная литература
1. Пугачев М. В. Теория автоматического регулирования. - М.: Высшая школа, 1965. -378 с.
2. Комплексная автоматизация производства Волчкевич Л.И. и др. -
М.: Машиностроение, 1983. - 270с.
3. Основы автоматизации управления производством. Под. ред. И.М. Макарова. -
М.: Высшая школа, 1983. - 504с.
Приложение 1
Минобрнауки России
ФГОБУ ВПО Тульский государственный университет
Механико-технологический факультет
|
|
|
|
|
|
