 |


Цифровой комплекс типа ИПДЦ
|
|
|
|
Цифровой комплекс типа ИПДЦ состоит из электросилового измерительного преобразователя давления типа ИПД, цифрового вольтметра типа Щ304 и является рабочим эталоном для поверки технических средств измерения давления или перепада давления.
 На рис. 1 приведена кинематическая схема ИПД. Принцип действия преобразователя давления типа ИПД заключается в следующем. Во внутреннюю полость чувствительного элемента 12 преобразователяподается давление Р.
На рис. 1 приведена кинематическая схема ИПД. Принцип действия преобразователя давления типа ИПД заключается в следующем. Во внутреннюю полость чувствительного элемента 12 преобразователяподается давление Р.
Рис. 1. Кинематическая схема измерительного преобразователя давления типа ИПД
Чувствительный элемент преобразует это давление в перемещение чувствительного элемента 12, которое передаётся на двухплечный рычаг 7, сбалансированный относительно опоры 8. Под действием силы, создаваемой чувствительным элементом, рычаг и связанный с ним плунжёр 10 индикатора рассогласования 11 перемещаются. Индикатор рассогласования преобразует перемещение в сигнал переменного тока, поступающий на вход усилителя 5. Усилитель преобразует входной сигнал переменного тока в выходной сигнал постоянного тока, который поступает на подвижные обмотки 3 и обмотки коррекции нелинейности 2 силовых механизмов 4, а также на вход блока резисторов 9, выходной, сигнал которого является выходным сигналом преобразователя.
В силовых механизмах 4 взаимодействие полей постоянных магнитов 1 с магнитными полями, создаваемыми токами, протекающими по обмоткам 2 и 3, создают силы, значения которых пропорциональны этим токам и силам, создаваемым чувствительным элементом.
Для периодической корректировки нуля и диапазона измерения ИПД на его передней панели (рис. 2) имеются корректор нуля 15, корректор диапазона 16, а в корпусе ИПД (рис. 1) – нагрузочное устройство, состоящее из груза–шара 13 и мембраны 6.
|
|
|
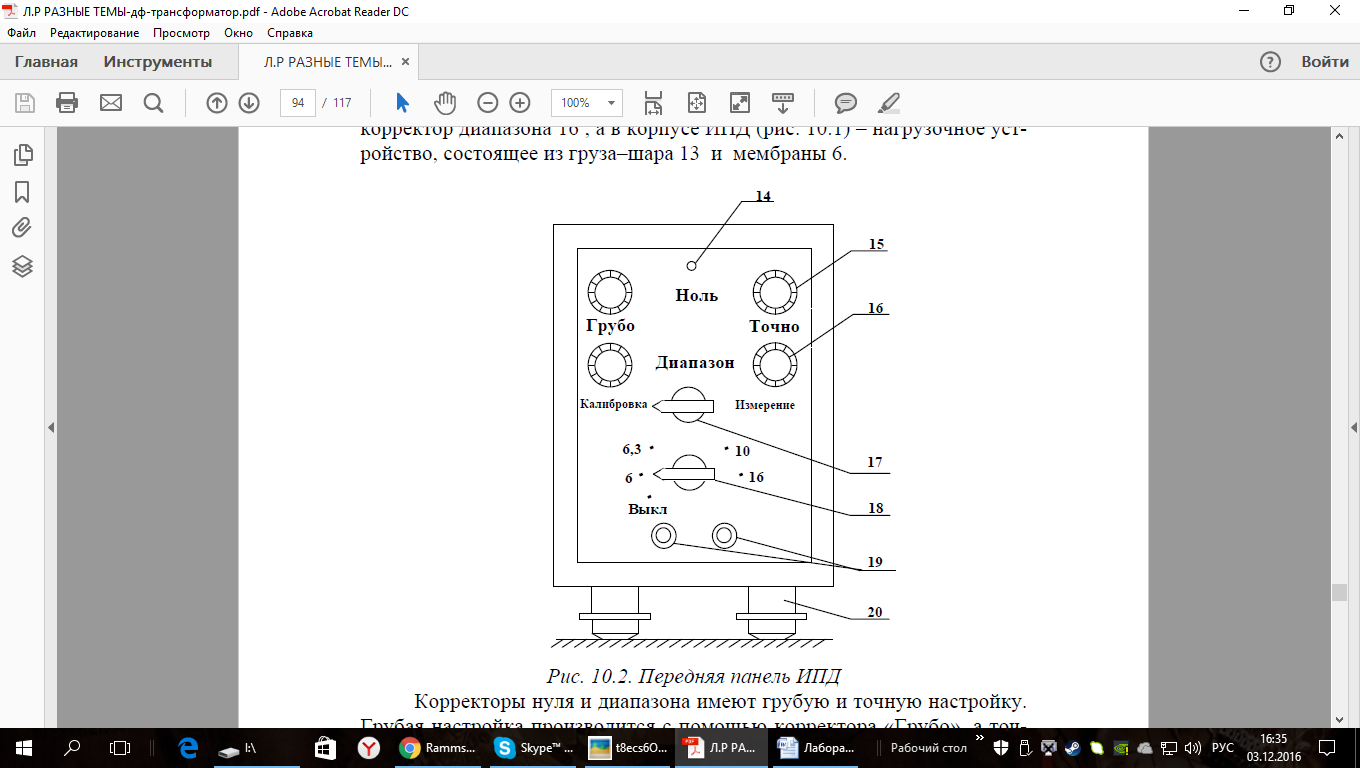
| Рис. 2. Передняя панель ИПД |
Корректоры нуля и диапазона имеют грубую и точную настройку. Грубая настройка производится с помощью корректора «Грубо», а точная настройка – с помощью корректора «Точно». Наложение груза 13 на рычаг 7 производится переводом переключателя 17 (рис. 2) в положение «Калибровка». В режиме измерения переключатель 17 должен находиться в положении «Измерен». Выходной сигнал ИПД снимается с клемм 19. Включение питания ИПД осуществляется переключателем диапазонов измерения 18, объединённым с выключателем напряжения питания. При включении питания ИПД загорается лампочка индикатора 14 наличия напряжения питания.
В горизонтальное положение ИПД устанавливают по уровню регулированием высоты ножек 20. На задней панели ИПД расположены штуцеры для подвода измеряемого давления, разъём питания и предохранитель.
ДИФФЕРЕНЦИАЛЬНЫЙ МАНОМЕТР
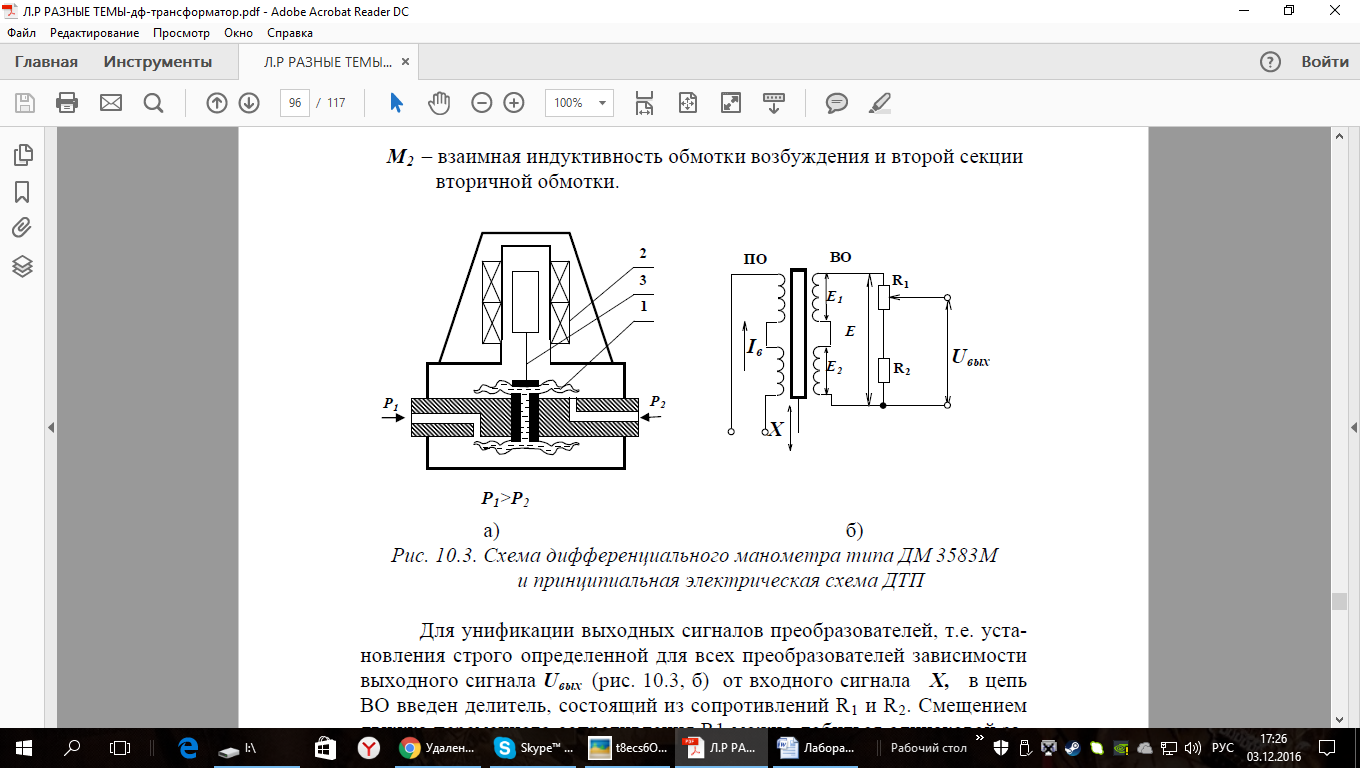
Дифференциальный манометр (дифманометр) типа ДМ 3583М, схема которого представлена на рис. 3, предназначен для преобразования перепада давления в электрический выходной сигнал.
Принцип действия дифманометра основан на деформации упругого чувствительного элемента 1,представляющего собой сдвоенную мембранную коробку, при воздействии на него перепада давления. При деформации чувствительного элемента перемещается сердечник 3 дифференциально-трансформаторного преобразователя (ДТП) 2, связанного с чувствительным элементом.
Перемещение сердечника 3 преобразуется в пропорциональное значение взаимной индуктивности первичной обмотки (ПО), которая является обмоткой возбуждения, и включенными встречно секциями вторичной обмотки (ВО).
Взаимная индуктивность связана с измеряемым перепадом давления ∆ P = P 1 – P 2, где P 1 – давление в плюсовой камере дифманометра, P 2 – давление в минусовой камере дифманометра, зависимостью:
|
|
|
M = Mв  ,
,
где M – взаимная индуктивность между ПО и ВО преобразователя, мГн;
∆ P –измеряемый перепад давления, Па;
∆ P В – верхний предел диапазона измерения перепада давления, Па;
Мв – значение взаимной индуктивности, соответствующее верхнему пределу диапазона измерения перепада давления, Мв = 10 мГн.
| Рис. 3. Схема дифференциального манометра типа ДМ 3583М |
АВТОМАТИЧЕСКИЕ ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЯ
РАСХОДА ЖИДКОСТЕЙ, ГАЗОВ И ПАРА
В качестве измерительных приборов для измерения расхода жидкостей, газов и пара, работающих в комплекте с ДМ, используют показывающие приборы типаКПД и самопишущие приборы типа КСД. Приборы этих типов могут быть оборудованы сигнализирующими, регулирующими и интегрирующими устройствами. Измерительныесхемы приборов типа КПД и КСД одинаковы и в комплекте с ДТП дифференциального манометра типа ДМ образуютдистанционную дифференциально-трансформаторную систему передачи показаний. Принципиальная схема дифференциально-трансформаторной системы передачи показаний представлена на рис4.
Первичныеобмотки преобразователей ДТП1 и ДТП2 соединены последовательно.Питание этих обмоток осуществляется переменным током напряжением 24В и частотой50 Гц от специальной обмотки силового трансформатора усилителя.Вторичные обмотки преобразователей ДТП1 и ДТП2 соединены по дифференциальной схеме, в которой осуществляется операция вычитания выходного сигнала U2 преобразователя ДТП2 из выходного сигнала U1 преобразователя ДТП1.
При отсутствии перепада давления на входе ДМ, когда измеряемый расход равен нулю, сердечники преобразователей ДТП1 и ДТП2 находятся в среднем положении. При этом положении сердечников выходной сигнал U1 преобразователя ДТП1 и выходной сигнал U2 преоб разователя ДТП2 равны нулю, поэтому ∆U = U1 – U2 = 0. В этом случае стрелка отсчетного устройства прибора должна находиться на нулевой отметке.
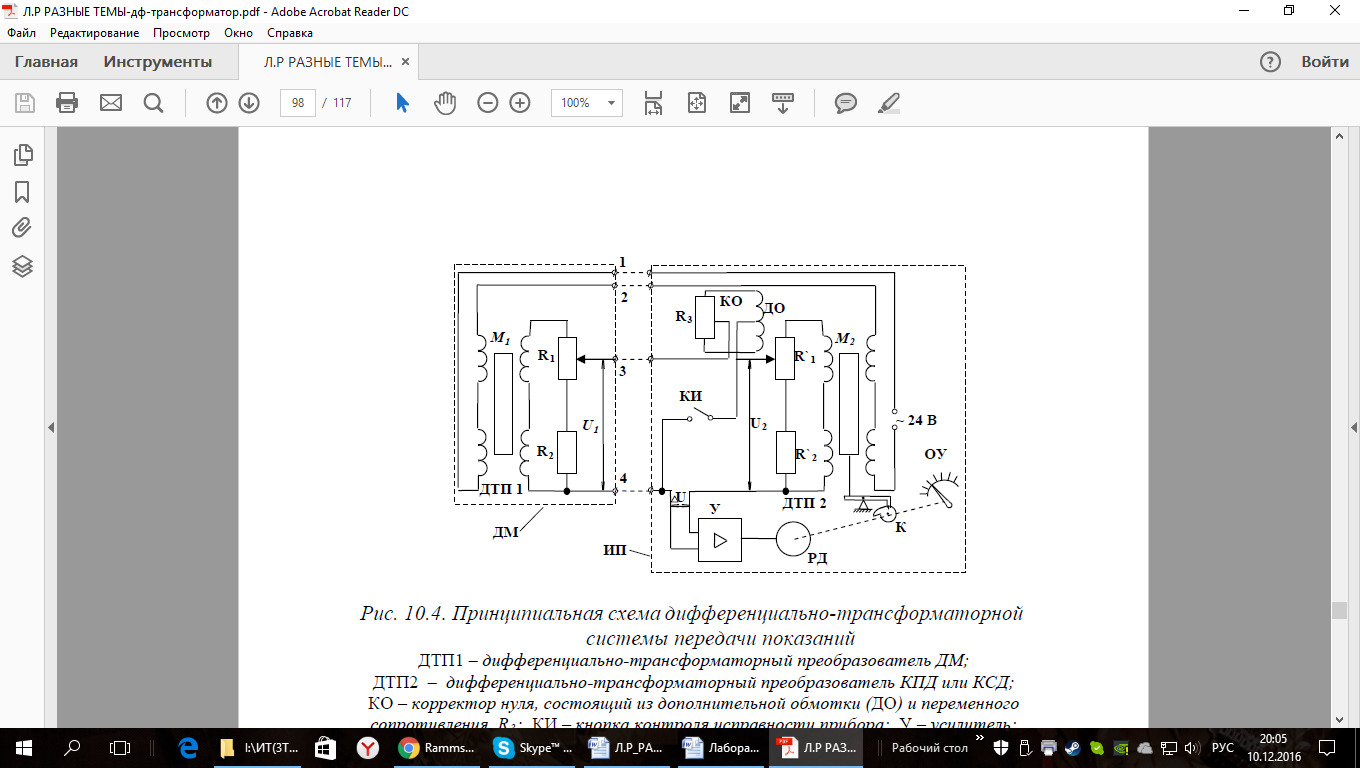
| Рис. 4. Принципиальная схема дифференциально-трансформаторной системы передачи показаний ДТП1 – дифференциально-трансформаторный преобразователь ДМ; ДТП2 – дифференциально-трансформаторный преобразователь КПД или КСД; КО – корректор нуля, состоящий из дополнительной обмотки (ДО) и переменного сопротивления R3; КИ – кнопка контроля исправности прибора; У – усилитель; РД – реверсивный двигатель; К – кулачок; ОУ – отсчетное устройство |
|
|
|
При таких положениях сердечников выходной сигнал U1 преобразователя
ДТП1 и выходной сигнал U2 преобразователя ДТП2 не рав ны между собой и на вход усилителя поступает сигнал ∆U = U1– U2.Сигнал ∆ U усиливается и подаетсяна управляющую обмотку реверсивного двигателя РД.При наличии напряжения на обмотке возбужденияреверсивного двигателя его вал начинаетвращаться и с помощью кулачка перемещает сердечник преобразователя ДТП2 до положения равновесия, при котором U1 = U2, а сигнал на входе усилителя равен нулю (∆U= U1–U2). Иначе следящая система, состоящая из усилителя , реверсивного двигателя и кулачка, приведет сердечник преобразователяДТП2 в положение равновесия. В положении равновесия вал реверсивного двигателя остановится, а стрелка отсчетного устройства прибора установится на отметке шкалы, соответствующей измеряемому расходу.
Практическая часть
ПОВЕРКА РАСХОДОМЕРОВ
|
|
|
