Расчёт и выбор питающего кабеля и автомата.
Рабочий ток кабеля соединяющий электродвигатель с ГРЩ находим по формуле:
Iраб = 22,75∙ 103 / (√3∙ 380∙ 0,74∙ 0,85) = 54,95 A.= 55 А.
По справочнику выбираем тип кабеля, число и сечение жил.
Выбираем кабель КНРП, трёхжильным сечением 10 мм2 (3 x 10), длиной 50 м, имеющий предельно допустимый ток 60 A. в режиме ПВ 40%, нагреве жилы кабеля 60˚ С и температуре окружающей среды 40˚ С.
|
|
|
|
|
|
|
| КПЭП.190501.04.002 ПЗ
| Лист
|
|
|
|
|
|
| 25.04.12
|
|
|
| Изм.
| Лист
| № докум.
| Подп.
| Дата
|
|
Находим ток автомата Ia = Iраб ∙cos φ= 55∙ 0,74 = 40,7 А и проверяем выбранный кабель на падение напряжения ∆U по формуле:
 где Р – активная мощность, Вт
l – длина кабеля, м
U – номинальное напряжение В
s – площадь сечения кабеля, мм2
γ – удельная проводимость жилы, принимаемая равной 48 м/Ом∙мм2.
∆U ≤ 7%, что соответствует требованиям Регистра.
Выбор автоматических выключателей осуществляется по рабочему току. Вначале выбирают номинальный ток автомата.
Номинальный ток расцепителей должен соответствовать условию: I ном.расч. ≥ I раб.
По таблице находим соответствующий автомат — это автомат серии А3110Р
Номинальный I (А) -20 А.
Максимальный расцепитель, установка по току срабатывания — 200 А
Предельная коммутационная способность (допустимый ударный ток КЗ) — 4000 А.
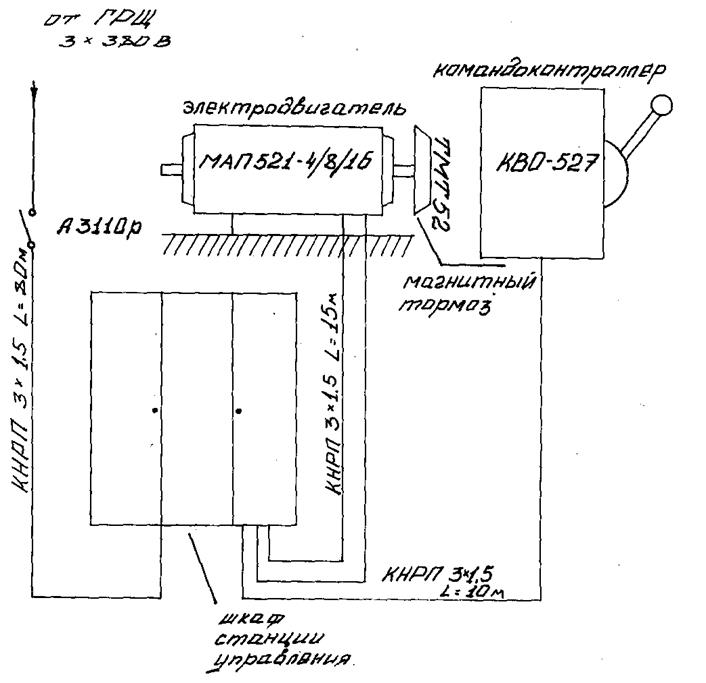
Описание работы принципиальной схемы.
Электроприводы средней и большой мощностей имеют, как правило, схему управления с магнитным контроллером и в этом случае состоят из двигателя с дисковым или колодочным тормозом, магнитного контроллера, командоконтроллера и ящиков сопротивлений (в схемах на постоянном токе). Схемы этого типа обеспечивают плавный пуск и быстрое торможение, ограничение пусковых и тормозных токов с заранее установленными значениями, широкую регулировку скорости при подъеме якоря и ограничение скорости при отдаче его на больших глубинах.
Приведенную на рис схему используют для управления трехскоростным асинхронным короткозамкнутым двигателем мощностью 22¸90 кВт. Схема укомплектована асинхронным двигателем типа МАП с пристроенным дисковым тормозом типа ТМТ, магнитным контроллером и командоконтроллером с одним нулевым и тремя рабочими положениями для вращения в двух направлениях
Подготовка схемы к действию сводится к включению питающего фидера и замыканию контакта ВУ1 выключателя цепей управления. Если маховичок командоконтроллера при этом находится в нулевом положении, то через контакт командоконтроллера КЗ и размыкающие контакты нулевого реле РН напряжение будет подано на выпрямитель Вп. Выпрямленное напряжение через размыкающие контакты контактора КТ и тепловых реле РТ1—РТ5 в этом случае поступает на нулевое реле РН, которое сработав, шунтирует контакт К3, обеспечивая питание своей катушки и остальных цепей управления в рабочих положениях командоконтроллера.
Одновременно через закрытый контакт К13 и размыкающие контакты грузового реле РГ и промежуточное реле РП2 питание получает катушка промежуточного реле РП1, которое при этом своими замыкающими контактами шунтирует К13 и подготавливает к работе контактор скорости КС3. Размыкающий контакт РП1 размыкается. Через контакт К4 получает питание реле ускорения РУ и изменяет положение своих контактов в цепях контакторов скорости.
При замыкании контакта ВУ1 получает питание сигнальная лампа ЛС, сигнализирующая о подаче напряжения на цепи управления. Будучи симметричной, эта схема работает на положениях командоконтроллера в направлении «Травить» так же, как и в направлении «Выбирать». Поэтому рассмотрим лишь ее работу при подъеме якоря. С поворотом маховичка командоконтроллера в первое рабочее положение «Выбирать» замыкаются контакты К5 и К7, остается замкнутым контакт К13 и размыкаются контакты К3 и К4.
где Р – активная мощность, Вт
l – длина кабеля, м
U – номинальное напряжение В
s – площадь сечения кабеля, мм2
γ – удельная проводимость жилы, принимаемая равной 48 м/Ом∙мм2.
∆U ≤ 7%, что соответствует требованиям Регистра.
Выбор автоматических выключателей осуществляется по рабочему току. Вначале выбирают номинальный ток автомата.
Номинальный ток расцепителей должен соответствовать условию: I ном.расч. ≥ I раб.
По таблице находим соответствующий автомат — это автомат серии А3110Р
Номинальный I (А) -20 А.
Максимальный расцепитель, установка по току срабатывания — 200 А
Предельная коммутационная способность (допустимый ударный ток КЗ) — 4000 А.
Описание работы принципиальной схемы.
Электроприводы средней и большой мощностей имеют, как правило, схему управления с магнитным контроллером и в этом случае состоят из двигателя с дисковым или колодочным тормозом, магнитного контроллера, командоконтроллера и ящиков сопротивлений (в схемах на постоянном токе). Схемы этого типа обеспечивают плавный пуск и быстрое торможение, ограничение пусковых и тормозных токов с заранее установленными значениями, широкую регулировку скорости при подъеме якоря и ограничение скорости при отдаче его на больших глубинах.
Приведенную на рис схему используют для управления трехскоростным асинхронным короткозамкнутым двигателем мощностью 22¸90 кВт. Схема укомплектована асинхронным двигателем типа МАП с пристроенным дисковым тормозом типа ТМТ, магнитным контроллером и командоконтроллером с одним нулевым и тремя рабочими положениями для вращения в двух направлениях
Подготовка схемы к действию сводится к включению питающего фидера и замыканию контакта ВУ1 выключателя цепей управления. Если маховичок командоконтроллера при этом находится в нулевом положении, то через контакт командоконтроллера КЗ и размыкающие контакты нулевого реле РН напряжение будет подано на выпрямитель Вп. Выпрямленное напряжение через размыкающие контакты контактора КТ и тепловых реле РТ1—РТ5 в этом случае поступает на нулевое реле РН, которое сработав, шунтирует контакт К3, обеспечивая питание своей катушки и остальных цепей управления в рабочих положениях командоконтроллера.
Одновременно через закрытый контакт К13 и размыкающие контакты грузового реле РГ и промежуточное реле РП2 питание получает катушка промежуточного реле РП1, которое при этом своими замыкающими контактами шунтирует К13 и подготавливает к работе контактор скорости КС3. Размыкающий контакт РП1 размыкается. Через контакт К4 получает питание реле ускорения РУ и изменяет положение своих контактов в цепях контакторов скорости.
При замыкании контакта ВУ1 получает питание сигнальная лампа ЛС, сигнализирующая о подаче напряжения на цепи управления. Будучи симметричной, эта схема работает на положениях командоконтроллера в направлении «Травить» так же, как и в направлении «Выбирать». Поэтому рассмотрим лишь ее работу при подъеме якоря. С поворотом маховичка командоконтроллера в первое рабочее положение «Выбирать» замыкаются контакты К5 и К7, остается замкнутым контакт К13 и размыкаются контакты К3 и К4.
|
|
|
|
|
|
|
| КПЭП.190501.04.002 ПЗ
| Лист
|
|
|
|
|
|
| 25.04.12
|
|
|
| Изм.
| Лист
| № докум.
| Подп.
| Дата
|
|
| Замкнувшийся контакт К5 обеспечивает срабатывание контакторов направления KB и тормозного КТ, что снимает механическое торможение и подготавливает двигатель к работе. Через замыкающий контакт контактора КТ подается напряжение на цепи всех контакторов скорости.
Замыкание контакта К7 вызывает срабатывание контактора малой скорости КС1, который обеспечивает подключение к сети тихоходной (16-полюсной) обмотки статора. Замыкание контактов КС1 в цепях катушек реле РУ и РН предупреждает их обесточивание. Между контакторами направления KB и КН, а также контакторами скорости КС1—КСЗ осуществляется электрическая блокировка от одновременного включения.
При переводе маховичка командоконтроллера во второе положение замыкается контакт К8, остаются замкнутыми контакты К5, К13, размыкается контакт К7. С размыканием контакта К7 теряет питание контактор КС1, который отключает тихоходную обмотку статора от сети. Замыкание контакта К8 приведет к срабатыванию контактора скорости КС2, подключающего к питающей сети обмотку средней скорости (8-полосную). Обесточивание катушки контактора КС1 вызывает размыкание его замыкающих контактов в цепи катушки реле РН (уже зашунтированного контактом КС2) и в цепи катушки реле РУ, которое, потеряв питание, обусловливает замыкание с выдержкой времени контакта РУ в цепи контактора КСЗ и размыкание РУ в цепи контактора КС2. Выдержка времени обеспечивает плавный перевод двигателя с малой скорости на большую при случайном резком переводе командоконтроллера в третье (крайнее) положение.
При переводе командоконтроллера в третье положение замыкается контакт К10, остается замкнутым контакт К5 и размыкаются контакты К8 и К13. Через замкнувшийся контакт К10, размыкающий РУ и замыкающий РП1
контакты получает питание контактор большой скорости КС3, после срабатывания которого напряжение сети подается на зажимы быстроходной обмотки статора (4-полюсной). Замыкающий блок — контакт КСЗ сохраняет замкнутой цепь нулевого реле РН.
Командоконтроллер устроен так, что при переводе маховичка из одного положения в другое сначала замыкается цепь контактора большей скорости, а затем уже отключается контактор меньшей скорости. Благодаря этому обмотки двигателя остаются обесточенными только в течение времени срабатывания контактора (0,05—0,07с), вследствие чего почти постоянно сохраняется электромагнитный момент и не допускается наложение механического тормоза.
Для остановки двигателя маховичок командоконтроллера переводится в нулевое положение. При этом размыкаются контакты командоконтроллера, разрывая цепи питания катушек контакторов скорости, направления и тормозного.
Двигатель отключается от сети и затормаживается механическим тормозом.
Схемой предусмотрена защита от коротких замыканий и перегрузок, а также минимальная, нулевая и грузовая защиты двигателя.
Цепи главного тока защищаются от коротких замыканий автоматом на щите питания, а вспомогательные цепи — предохранителями Пр1 и Пр2
Минимальную и нулевую защиты осуществляет нулевое реле РН, которое, срабатывая, обесточивает все цепи управления, вызывая тем самым остановку двигателя.
Защиту от перегрузок выполняют тепловые реле РТ1—РТ5, контакты которых при срабатывании реле размыкают цепь нулевого реле РН. Повторный пуск производится из нулевого положения командоконтроллера после самовозврата тепловых реле в исходное положение. В экстренных случаях двигатель можно пустить, не ожидая остывания нагревательных элементов тепловых реле. Для этого необходимо вернуть маховичок в нулевое положение, замкнуть контакт ВУ2, переводя рукоятку выключателя цепей управления в нефиксированное второе положение. Тогда получает питание и срабатывает промежуточное реле РП2, шунтируя контакты тепловых реле РТ1—РТ5 в цепи РН и контакт PГ в цепи РП1. Размыкающий контакт КС3 в цепи катушки РН не позволяет при этом двигателю включиться на большую скорость.
Грузовую защиту от перегрузок при работе на быстроходной обмотке осуществляет реле РГ, которое в результате срабатывания размыкает цепь катушки промежуточного реле РП1.
Потеряв питание, реле РП1 отключает контактор большой скорости КС3 и включает контактор средней скорости КС2. Двигатель переводится на работу со средней скоростью и сигнальная лампа ЛС гаснет. После спадания нагрузки перевод двигателя на большую скорость осуществляется возвратом маховичка командоконтроллера во второе положение, так как в третьем положении контакт К13 разомкнут.
|
|
|
|
|
|
|
| КПЭП.190501.04.002 ПЗ
| Лист
|
|
|
|
|
|
| 25.04.12
|
|
|
| Изм.
| Лист
| № докум.
| Подп.
| Дата
|
|
С увеличением мощности установки (свыше 100 кВт) релейно-контакторные схемы становятся громоздкими и малонадежными. Поэтому в специальных установках большой мощности все еще находит применение система Г—Д, а также используют другие специальные схемы.
Инструкция по техническому обслуживанию электропривода якорно-швартового устройства.
Для нормальной работы электропривода и схемы управления ЯШУ необходимо соблюдать следующие требования:
- Контакты аппаратуры необходимо периодически очищать от нагара. Контакторные поверхности зачищать бархатным напильником. Контакты с серебряной наплавкой зачищают только при появлении на них капель. После зачистки необходимо проверить правильность касания контактов на наличие перекосов и просветов.
- Предохранители должны иметь приспособление от самовыпадания. Поверхности необходимо зачищать от окиси.
- Реле требуют систематического ухода, удаления пыли и грязи с контактов якоря и сердечника магнитной системы. Подгоревшие контакты зачищают и шлифуют. Необходимо следить за лёгкостью хода подвижных частей, отсутствием перекосов и нагревом катушек.
- Маховики контроллеров должны иметь чёткую фиксацию во всех положениях. Самовозврат рукоятки должен быть чётким из всех положений. При растворе контактов меньше 10 мм рамки и кулачки меняют. У контроллеров барабанного типа прилегание сухарей должно быть не менее, чем на ¾ их ширины.
- Изоляционные детали не должны иметь повреждений. Пусковые выключатели проверяют на срабатывание до пуска электродвигателя. Испытание проводят на малых частотах вращения. Зачистку контакторной аппаратуры проводят раз в 2 месяца.
ЗАКЛЮЧЕНИЕ
Данная система якорно-швартовного устройства может быть использована для постановки и выборки якоря на судах данного водоизмещения и на расчетных глубинах.
|
|
|
|
|
|
|
| КПЭП.190501.04.002 ПЗ
| Лист
|
|
|
|
|
|
| 25.04.12
|
|
|
| Изм.
| Лист
| № докум.
| Подп.
| Дата
|
|
Приложение 1
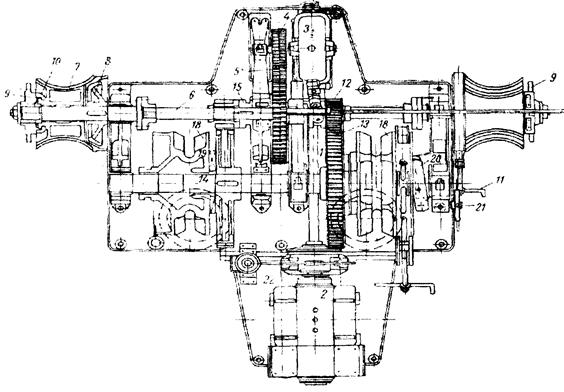
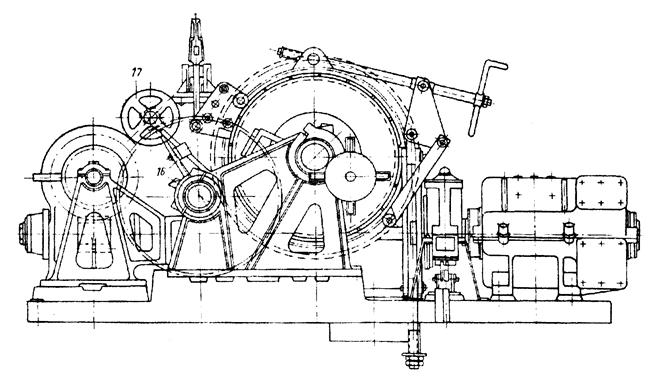 Рис. 1
Рис. 1
|
|
|
|
|
|
|
| КПЭП.190501.04.003 ПЗ
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Кинематическая схема брашпиля
| Литера
| Масса
| Масштаб
|
|
| Изм.
| Лист
| № докум.
| Подп.
| Дата
|
|
|
|
|
|
|
| Разраб.
| Гавриленко
|
| 25.04.12
|
|
| Пров.
| Дробот
|
| 25.04.12
|
|
| Т. контр.
|
|
|
| Лист 19
| Листов 21
|
|
|
|
|
|
|
| 08-СЭ-14
|
|
| Н. контр.
| Дробот
|
|
|
|
| Утв
| Цыганкова
|
|
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | |